YOLOv5改进 | 2023主干篇 | 替换LSKNet遥感目标检测主干 (附代码+修改教程+结构讲解)
?一、本文介绍
本文给大家带来的改进内容是LSKNet(Large Kernel Selection, LK Selection),其是一种专为遥感目标检测设计的网络架构,其核心思想是动态调整其大的空间感受野,以更好地捕捉遥感场景中不同对象的范围上下文。实验部分我在一个包含三十多个类别的数据集上进行实验,其中包含大目标检测和小目标检测,mAP的平均涨点幅度在0.04-0.1之间(也有极个别的情况没有涨点),同时官方的版本只提供了一个大版本,我在其基础上提供一个轻量化版本给大家选择,本文会先给大家对比试验的结果,供大家参考。
推荐指数:?????
训练结果对比图->??
实验部分:我在一个包含三十多个类别的数据集上进行实验,其中包含大目标检测和小目标检测,mAP的平均涨点幅度在0.04-0.1之间(也有极个别的情况没有涨点)

目录
二、LSKNet原理
 ?
?
论文地址:?官方论文地址
代码地址:?官方代码地址
 ?
?
2.1??LSKNet的基本原理
LSKNet(Large Selective Kernel Network)是一种专为遥感目标检测设计的网络架构,其核心优势在于能够动态调整其大的空间感受野,以更好地捕捉遥感场景中不同对象的范围上下文。这是第一次在遥感目标检测领域探索大型和选择性核机制。
LSKNet(大型选择性核网络)的基本原理包括以下关键组成部分:
1. 大型核选择(LK Selection)子块:这个子块能够动态地调整网络的感受野,以便根据需要捕获不同尺度的上下文信息。这使得网络能够根据遥感图像中对象的不同尺寸和复杂性调整其处理能力。
2. 前馈网络(FFN)子块:该子块用于通道混合和特征精炼。它由一个完全连接的层、一个深度卷积、一个GELU激活函数以及第二个完全连接的层组成。这些组件一起工作,提高了特征的质量并为分类和检测提供了必要的信息。
这两个子块共同构成LSKNet块,能够提供大范围的上下文信息,同时保持对细节的敏感度,这对于遥感目标检测尤其重要。
下面我将为大家展示四种不同的选择性机制模块的架构比较:
 ?
?
对于LSK模块:
1. 有一个分解步骤,似乎是用来处理大尺寸的卷积核(Large K)。
2. 接着是一个空间选择步骤,可能用于选择或优化空间信息的特定部分。
这与其他三种模型的架构相比较,显示了LSK模块在处理空间信息方面可能有其独特的方法。具体来说,LSK模块似乎强调了在大尺寸卷积核上进行操作,这可能有助于捕获遥感图像中较大范围的上下文信息,这对于检测图像中的对象特别有用。空间选择步骤可能进一步增强了模型对于输入空间特征的选择能力,从而使其能够更加有效地聚焦于图像的重要部分。
2.2?大型核选择(LK Selection)子块
LSKNet的大型核选择(Large Kernel Selection, LK Selection)子块是其架构的核心组成部分之一。这个子块的功能是根据需要动态调整网络的感受野大小。通过这种方式,LSKNet能够根据遥感图像中不同对象的大小和上下文范围,调整处理这些对象所需的空间信息范围。
大型核选择子块与前馈网络(Feed-forward Network, FFN)子块一起工作。FFN子块用于通道混合和特征细化,它包括一个序列,这个序列由一个全连接层、一个深度卷积、一个GELU激活函数以及第二个全连接层组成。这种设计允许LSKNet块进行特征深度融合和增强,进一步提升了遥感目标检测的性能。
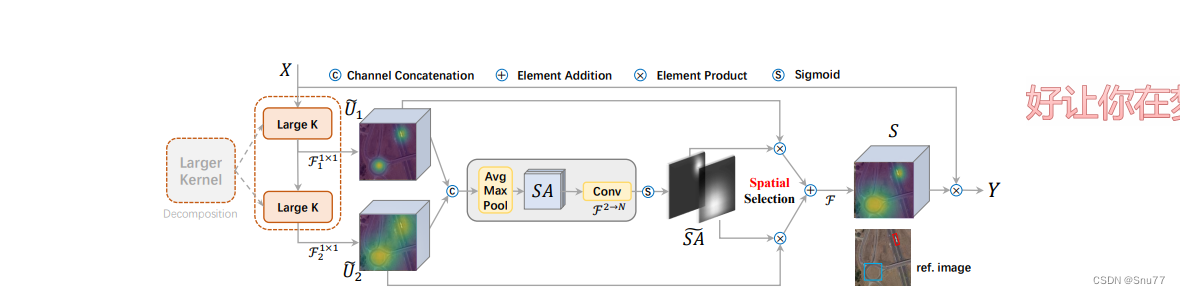
下面我将通过LSK(Large Selective Kernel)模块的概念性插图,展示LSKNet如何通过大型核选择子块和空间选择机制来处理遥感数据,从而使网络能够适应不同对象的长范围上下文需求。
 ?
?
1. Large Kernel Decomposition:原始输入?经过大核分解,使用两种不同的大型卷积核(Large K)进行处理,以捕获不同尺度的空间信息。
2. Channel Concatenation:两个不同的卷积输出?和
?通过通道拼接组合在一起,这样可以在后续步骤中同时利用不同的空间特征。
3. Mixed Pooling:拼接后的特征图经过平均池化和最大池化的组合操作,然后与自注意力(SA)机制一起使用,以进一步强化特征图的关键区域。
4. Convolution and Spatial Selection:通过卷积操作和自注意力(SA)生成新的特征图,然后通过空间选择机制进一步增强对目标区域的关注。
5. Element Product and Sigmoid:使用Sigmoid函数生成一个掩码?,然后将这个掩码与特征图
?进行元素乘积操作,得到最终的输出特征图
?。这一步骤用于加权特征图中更重要的区域,以增强网络对遥感图像中特定对象的检测能力。
整个LSK模块的设计强调了对遥感图像中不同空间尺度和上下文信息的有效捕获,这对于在复杂背景下准确检测小型或密集排布的目标至关重要。通过上述步骤的复合操作,LSK模块能够提升遥感目标检测的性能。
2.3?前馈网络(FFN)子块
LSKNet的前馈网络(Feed-forward Network, FFN)子块用于通道混合和特征精炼。该子块包含以下组成部分:
1. 全连接层:用于特征变换,提供网络额外的学习能力。
2. 深度卷积(depth-wise convolution):用于在通道间独立地应用空间滤波,减少参数量的同时保持效果。
3. GELU激活函数:一种高斯误差线性单元,用于引入非线性,提高模型的表达能力。
4. 第二个全连接层:进一步变换和精炼特征。
这个FFN子块紧随LK Selection子块之后,作用是在保持特征空间信息的同时,增强网络在特征通道上的表示能力。通过这种设计,FFN子块有效地对输入特征进行了深度加工,提升了最终特征的质量,从而有助于提高整个网络在遥感目标检测任务中的性能。
三、LSKNet核心代码
将此代码复制粘贴到''ultralytics/nn/modules''目录下新建一个py文件我这里起名字为LSKNet.py,然后把代码复制粘贴进去即可,使用教程看章节四。
import torch
import torch.nn as nn
from torch.nn.modules.utils import _pair as to_2tuple
from timm.models.layers import DropPath, to_2tuple
from functools import partial
import warnings
class Mlp(nn.Module):
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Conv2d(in_features, hidden_features, 1)
self.dwconv = DWConv(hidden_features)
self.act = act_layer()
self.fc2 = nn.Conv2d(hidden_features, out_features, 1)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.dwconv(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class LSKblock(nn.Module):
def __init__(self, dim):
super().__init__()
self.conv0 = nn.Conv2d(dim, dim, 5, padding=2, groups=dim)
self.conv_spatial = nn.Conv2d(dim, dim, 7, stride=1, padding=9, groups=dim, dilation=3)
self.conv1 = nn.Conv2d(dim, dim // 2, 1)
self.conv2 = nn.Conv2d(dim, dim // 2, 1)
self.conv_squeeze = nn.Conv2d(2, 2, 7, padding=3)
self.conv = nn.Conv2d(dim // 2, dim, 1)
def forward(self, x):
attn1 = self.conv0(x)
attn2 = self.conv_spatial(attn1)
attn1 = self.conv1(attn1)
attn2 = self.conv2(attn2)
attn = torch.cat([attn1, attn2], dim=1)
avg_attn = torch.mean(attn, dim=1, keepdim=True)
max_attn, _ = torch.max(attn, dim=1, keepdim=True)
agg = torch.cat([avg_attn, max_attn], dim=1)
sig = self.conv_squeeze(agg).sigmoid()
attn = attn1 * sig[:, 0, :, :].unsqueeze(1) + attn2 * sig[:, 1, :, :].unsqueeze(1)
attn = self.conv(attn)
return x * attn
class Attention(nn.Module):
def __init__(self, d_model):
super().__init__()
self.proj_1 = nn.Conv2d(d_model, d_model, 1)
self.activation = nn.GELU()
self.spatial_gating_unit = LSKblock(d_model)
self.proj_2 = nn.Conv2d(d_model, d_model, 1)
def forward(self, x):
shorcut = x.clone()
x = self.proj_1(x)
x = self.activation(x)
x = self.spatial_gating_unit(x)
x = self.proj_2(x)
x = x + shorcut
return x
class Block(nn.Module):
def __init__(self, dim, mlp_ratio=4., drop=0., drop_path=0., act_layer=nn.GELU, norm_cfg=None):
super().__init__()
if norm_cfg:
self.norm1 = nn.BatchNorm2d(norm_cfg, dim)
self.norm2 = nn.BatchNorm2d(norm_cfg, dim)
else:
self.norm1 = nn.BatchNorm2d(dim)
self.norm2 = nn.BatchNorm2d(dim)
self.attn = Attention(dim)
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
layer_scale_init_value = 1e-2
self.layer_scale_1 = nn.Parameter(
layer_scale_init_value * torch.ones((dim)), requires_grad=True)
self.layer_scale_2 = nn.Parameter(
layer_scale_init_value * torch.ones((dim)), requires_grad=True)
def forward(self, x):
x = x + self.drop_path(self.layer_scale_1.unsqueeze(-1).unsqueeze(-1) * self.attn(self.norm1(x)))
x = x + self.drop_path(self.layer_scale_2.unsqueeze(-1).unsqueeze(-1) * self.mlp(self.norm2(x)))
return x
class OverlapPatchEmbed(nn.Module):
""" Image to Patch Embedding
"""
def __init__(self, img_size=224, patch_size=7, stride=4, in_chans=3, embed_dim=768, norm_cfg=None):
super().__init__()
patch_size = to_2tuple(patch_size)
self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=stride,
padding=(patch_size[0] // 2, patch_size[1] // 2))
if norm_cfg:
self.norm = nn.BatchNorm2d(norm_cfg, embed_dim)
else:
self.norm = nn.BatchNorm2d(embed_dim)
def forward(self, x):
x = self.proj(x)
_, _, H, W = x.shape
x = self.norm(x)
return x, H, W
class LSKNet(nn.Module):
def __init__(self, img_size=224, in_chans=3, dim=None, embed_dims=[64, 128, 256, 512],
mlp_ratios=[8, 8, 4, 4], drop_rate=0., drop_path_rate=0., norm_layer=partial(nn.LayerNorm, eps=1e-6),
depths=[3, 4, 6, 3], num_stages=4,
pretrained=None,
init_cfg=None,
norm_cfg=None):
super().__init__()
assert not (init_cfg and pretrained), \
'init_cfg and pretrained cannot be set at the same time'
if isinstance(pretrained, str):
warnings.warn('DeprecationWarning: pretrained is deprecated, '
'please use "init_cfg" instead')
self.init_cfg = dict(type='Pretrained', checkpoint=pretrained)
elif pretrained is not None:
raise TypeError('pretrained must be a str or None')
self.depths = depths
self.num_stages = num_stages
dpr = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))] # stochastic depth decay rule
cur = 0
for i in range(num_stages):
patch_embed = OverlapPatchEmbed(img_size=img_size if i == 0 else img_size // (2 ** (i + 1)),
patch_size=7 if i == 0 else 3,
stride=4 if i == 0 else 2,
in_chans=in_chans if i == 0 else embed_dims[i - 1],
embed_dim=embed_dims[i], norm_cfg=norm_cfg)
block = nn.ModuleList([Block(
dim=embed_dims[i], mlp_ratio=mlp_ratios[i], drop=drop_rate, drop_path=dpr[cur + j], norm_cfg=norm_cfg)
for j in range(depths[i])])
norm = norm_layer(embed_dims[i])
cur += depths[i]
setattr(self, f"patch_embed{i + 1}", patch_embed)
setattr(self, f"block{i + 1}", block)
setattr(self, f"norm{i + 1}", norm)
self.width_list = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]
def freeze_patch_emb(self):
self.patch_embed1.requires_grad = False
@torch.jit.ignore
def no_weight_decay(self):
return {'pos_embed1', 'pos_embed2', 'pos_embed3', 'pos_embed4', 'cls_token'} # has pos_embed may be better
def get_classifier(self):
return self.head
def reset_classifier(self, num_classes, global_pool=''):
self.num_classes = num_classes
self.head = nn.Linear(self.embed_dim, num_classes) if num_classes > 0 else nn.Identity()
def forward_features(self, x):
B = x.shape[0]
outs = []
for i in range(self.num_stages):
patch_embed = getattr(self, f"patch_embed{i + 1}")
block = getattr(self, f"block{i + 1}")
norm = getattr(self, f"norm{i + 1}")
x, H, W = patch_embed(x)
for blk in block:
x = blk(x)
x = x.flatten(2).transpose(1, 2)
x = norm(x)
x = x.reshape(B, H, W, -1).permute(0, 3, 1, 2).contiguous()
outs.append(x)
return outs
def forward(self, x):
x = self.forward_features(x)
# x = self.head(x)
return x
class DWConv(nn.Module):
def __init__(self, dim=768):
super(DWConv, self).__init__()
self.dwconv = nn.Conv2d(dim, dim, 3, 1, 1, bias=True, groups=dim)
def forward(self, x):
x = self.dwconv(x)
return x
def _conv_filter(state_dict, patch_size=16):
""" convert patch embedding weight from manual patchify + linear proj to conv"""
out_dict = {}
for k, v in state_dict.items():
if 'patch_embed.proj.weight' in k:
v = v.reshape((v.shape[0], 3, patch_size, patch_size))
out_dict[k] = v
return out_dict
def LSKNET_Tiny():
model = LSKNet(depths = [2, 2, 2, 2])
return model
if __name__ == '__main__':
model = LSKNet()
inputs = torch.randn((1, 3, 640, 640))
for i in model(inputs):
print(i.size())?四、手把手教你添加LSKNet网络结构
这个主干的网络结构添加起来算是所有的改进机制里最麻烦的了,因为有一些网略结构可以用yaml文件搭建出来,有一些网络结构其中的一些细节根本没有办法用yaml文件去搭建,用yaml文件去搭建会损失一些细节部分(而且一个网络结构设计很多细节的结构修改方式都不一样,一个一个去修改大家难免会出错),所以这里让网络直接返回整个网络,然后修改部分 yolo代码以后就都以这种形式添加了,以后我提出的网络模型基本上都会通过这种方式修改,我也会进行一些模型细节改进。创新出新的网络结构大家直接拿来用就可以的。下面开始添加教程->
(同时每一个后面都有代码,大家拿来复制粘贴替换即可,但是要看好了不要复制粘贴替换多了)
修改一
我们复制网络结构代码到“yolov5-master/models”目录下创建一个目录,我这里的名字是modules(如果将文件放在models下面随着改进机制越来越多不太好区分,所以创建一个文件目录将改进机制全部放在里面)?,然后创建一个py文件将代码复制粘贴到里面我这里起的名字是ShuffleNetV1。

??
修改二
然后我们在我们创建的目录里面创建一个初始化文件'__init__.py',然后在里面导入我们同级目录的所有改进机制

???
修改三
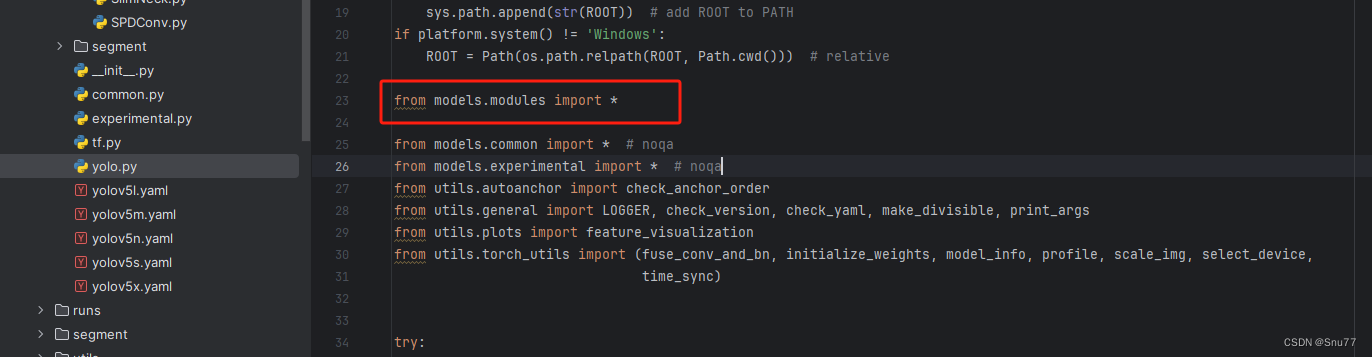
我们找到如下文件'models/yolo.py'在开头里面导入我们的模块,这里需要注意要将代码放在common导入的文件上面,否则有一些模块会使用我们modules里面的,可能同名导致报错,这里如果你使用多个我的改进机制填写一个即可,不用重复添加。
 ?
?
修改四
添加如下两行代码,根据行数找相似的代码进行添加
 ?
?
修改五
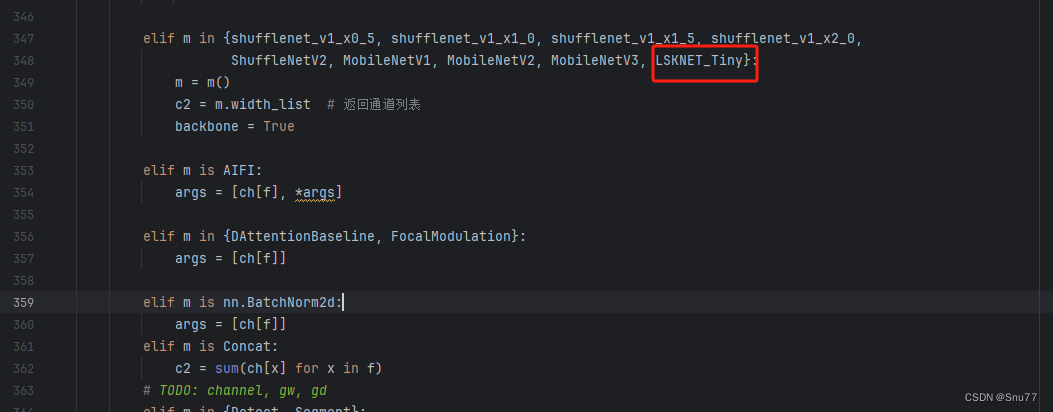
找到七百多行大概把具体看图片,按照图片来修改就行,添加红框内的部分,注意没有()只是函数名,我这里只添加了部分的版本,大家有兴趣这个ShuffleNetV1还有更多的版本可以添加,看我给的代码函数头即可。
?
elif m in {自行添加对应的模型即可,下面都是一样的}:
m = m()
c2 = m.width_list # 返回通道列表
backbone = True修改五?
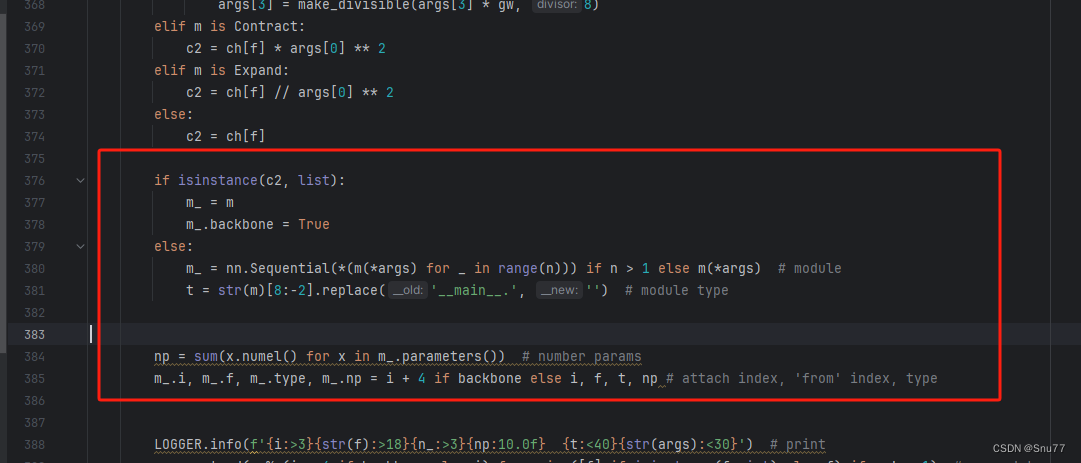
下面的两个红框内都是需要改动的。?
 ?
?
if isinstance(c2, list):
m_ = m
m_.backbone = True
else:
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type, m_.np = i + 4 if backbone else i, f, t, np # attach index, 'from' index, type修改六?
如下的也需要修改,全部按照我的来。
 ?
?
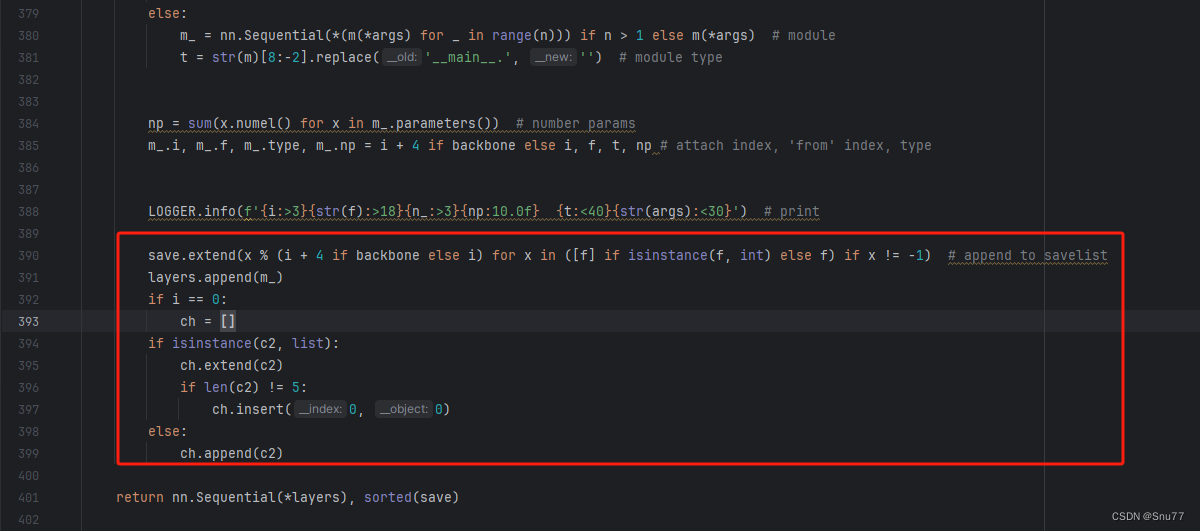
代码如下把原先的代码替换了即可。?
save.extend(x % (i + 4 if backbone else i) for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list):
ch.extend(c2)
if len(c2) != 5:
ch.insert(0, 0)
else:
ch.append(c2)修改七
修改七和前面的都不太一样,需要修改前向传播中的一个部分,?已经离开了parse_model方法了。
可以在图片中开代码行数,没有离开task.py文件都是同一个文件。 同时这个部分有好几个前向传播都很相似,大家不要看错了,是70多行左右的!!!,同时我后面提供了代码,大家直接复制粘贴即可,有时间我针对这里会出一个视频。
找到如下的代码,这里不太好找,我给大家上传一个原始的样子。
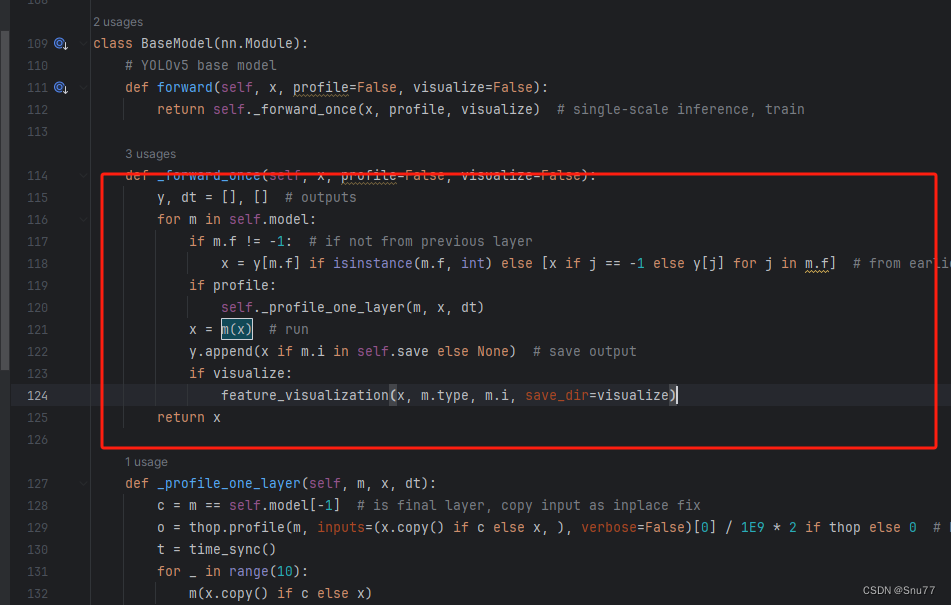 ?
?
然后我们用后面的代码进行替换,替换完之后的样子如下->?
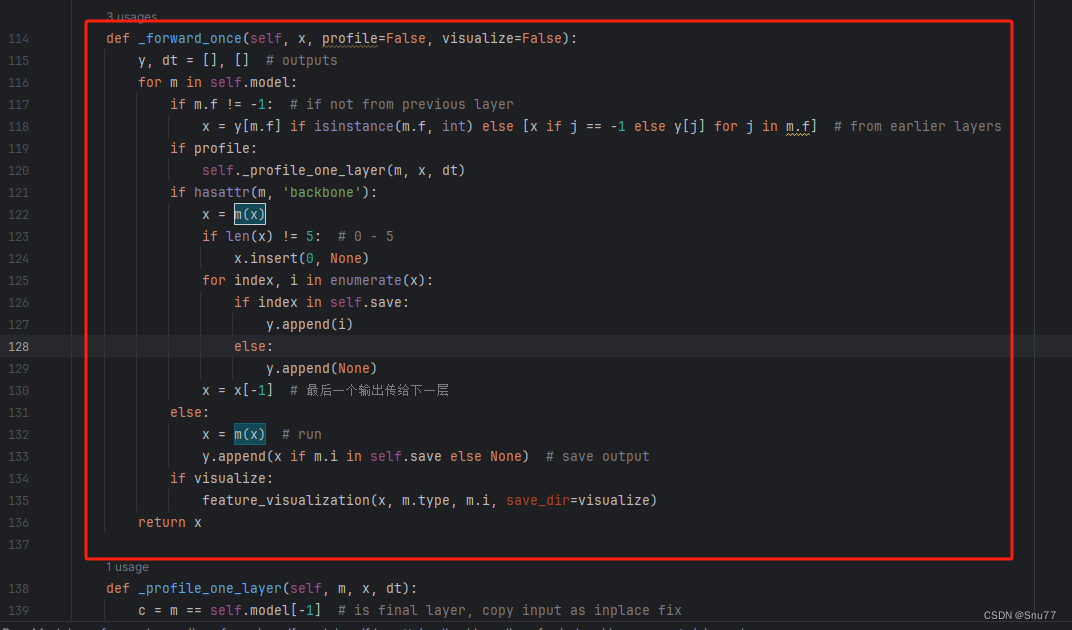 ???
???
代码如下->
def _forward_once(self, x, profile=False, visualize=False):
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, 'backbone'):
x = m(x)
if len(x) != 5: # 0 - 5
x.insert(0, None)
for index, i in enumerate(x):
if index in self.save:
y.append(i)
else:
y.append(None)
x = x[-1] # 最后一个输出传给下一层
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
return x到这里就完成了修改部分,但是这里面细节很多,大家千万要注意不要替换多余的代码,导致报错,也不要拉下任何一部,都会导致运行失败,而且报错很难排查!!!很难排查!!!?
五、LSKNet的yaml文件
复制如下yaml文件进行运行!!!?
# YOLOv5 🚀 by Ultralytics, AGPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
backbone:
# [from, number, module, args]
[[-1, 1, LSKNET_Tiny, []], # 0-4-P1/
[-1, 1, SPPF, [1024, 5]], # 5
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 3], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 9
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 2], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 13 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 16 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 5], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 19 (P5/32-large)
[[13, 16, 19], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
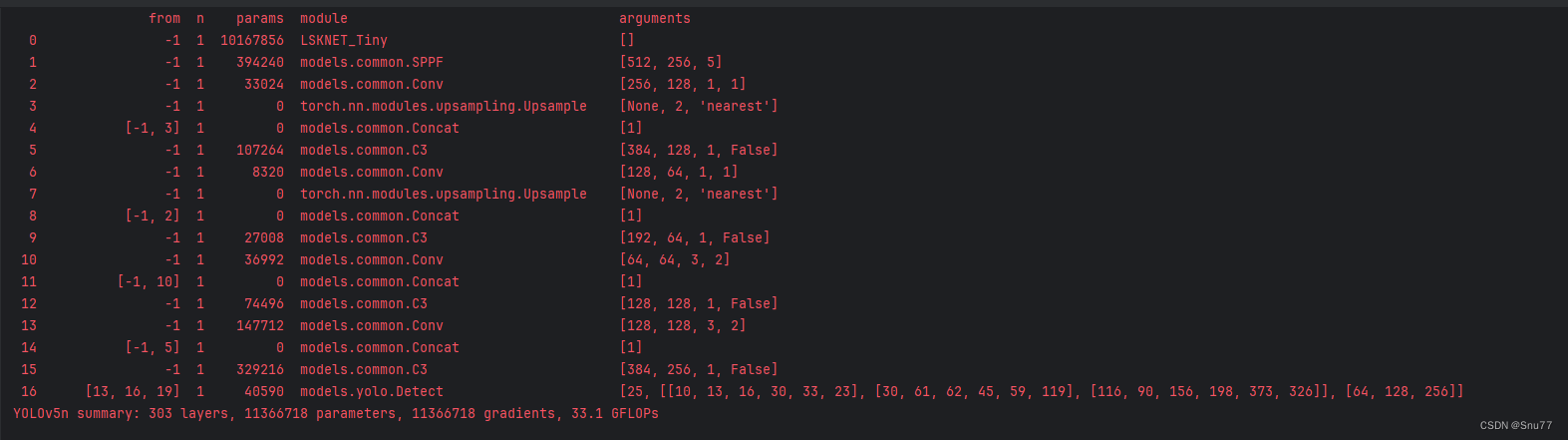
六、成功运行记录?
下面是成功运行的截图,已经完成了有1个epochs的训练,图片太大截不全第2个epochs了。?
 ??
??
 ???
???
?
七、本文总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的YOLOv5改进有效涨点专栏,本专栏目前为新开的平均质量分97分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,目前本专栏免费阅读(暂时,大家尽早关注不迷路~),如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~
 ??
??
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- GitHub项目推荐- schedule-x
- 构建高效持久层:深度解析 MyBatis-Plus(01)
- 一阶系统G(s)=7/(2+s),在单位阶跃条件下在t=0时的切线斜率是什么?
- 【Vue】属性计算 computed
- (网络安全)名词解析
- SRS服务器RTMP2WebRTC外网拉流配置
- Python实现力扣经典面试题——移除元素
- web自动化测试从入门到持续集成
- 分布式IO在工业自动化中的应用
- PHP 命名空间(namespace)