Open3D 两片点云的最小/最大距离(23)
发布时间:2024年01月14日
Open3D 两片点云的最小/最大距离(23)
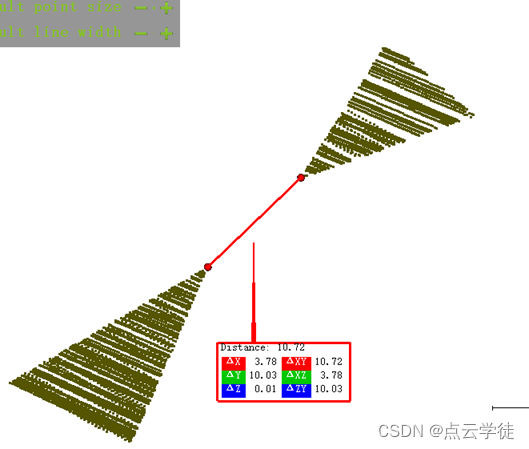
一、效果展示
算法与实际量测的结果保持一致,输出最近距离和对应点

二、使用步骤
1.代码
import open3d as o3d
import numpy as np
# 读取点云数据
cloud_2 = o3d.io.read_point_cloud(
文章来源:https://blog.csdn.net/weixin_44329757/article/details/135589311
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 基础GCN
- RabbitMQ(八)消息的序列化
- valgrind跨平台调试及其问题分析
- 低压MOS在变频风扇上的应用-REASUNOS瑞森半导体
- 如何把题库做成答题小程序?
- Linux 网口配置文件及网络服务
- nginx本地打开vue打包项目
- 红日靶场之sta&&ck远程桌面控制 个人学习)
- vscode中如何解决 Comments are not permitted(JSON中不允许注释)
- 机器学习在表面缺陷检测中的技术与实践