二维点集的凸包点寻找算法
发布时间:2024年01月12日
1. 思路
利用凸凹最直接的性质去判断,即:两个相近的凸点组成的直线,将会把他们的近邻点完全隔离在直线的同一侧。如此一来,先选取一个明显的凸点,如y坐标最小的点,以它为出发点,贪婪式搜寻即可。
如下图所示:
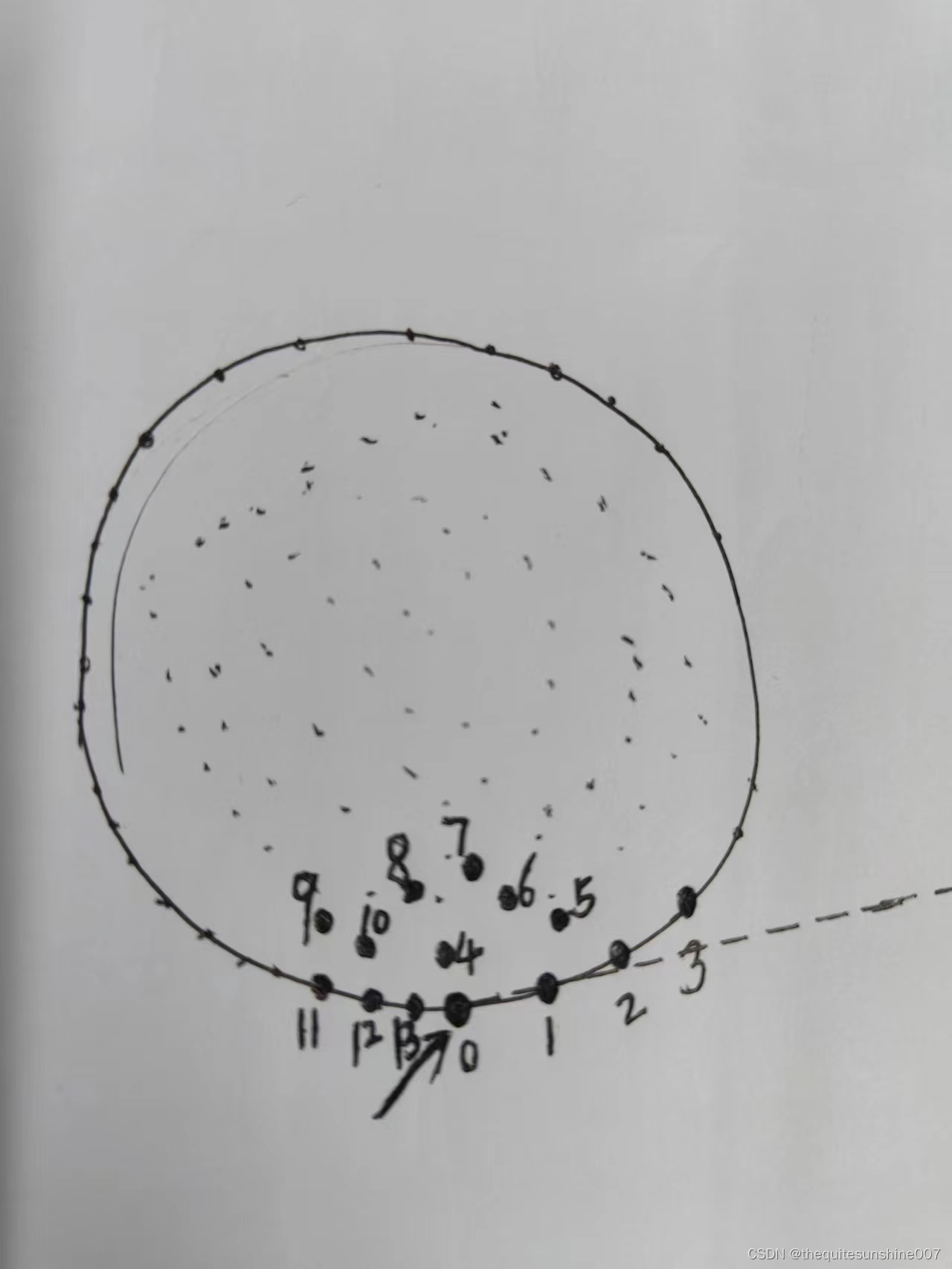
假设0点为y坐标最小的点,图中带编号的点为其近邻点(kd-tree加速查找),遍历编号1~13的点,当遍历到点1时,点0点1组成的直线将点2~点13完全隔离在直线同一侧(条件),满足这个条件后,将点1作为下一轮的出发点,重复上述过程即可。
2. 代码实现
节选, 最终找到的凸点点集索引存在bound_points_map中。
pcl::KdTreeFLANN<Point> kdtree;
kdtree.setInputCloud(points_2d);
int prev_idx = -1;
unordered_map<int, int> bound_points_map;
while (prev_idx != cur_idx)
{
if (bound_points_map.find(cur_idx) != bound_points_map.end())
break;
else
{
boundary_points_idx.push_back(cur_idx);
bound_points_map.emplace(cur_idx, cur_idx);
}
auto se
文章来源:https://blog.csdn.net/thequitesunshine007/article/details/135556698
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!