ROS2 仿真学习01 Gazebo 操作界面介绍
打开终端,输入命令
ros2 launch gazebo_ros gazebo.launch.py
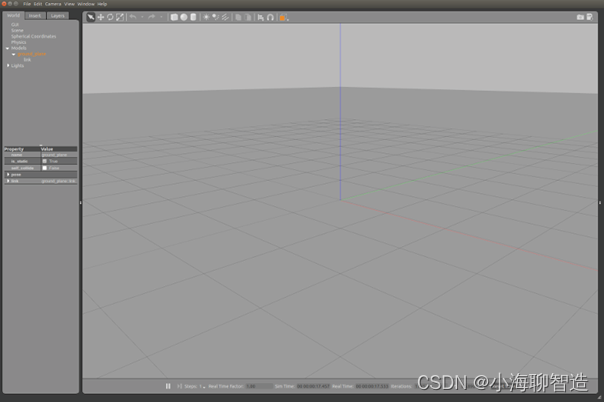
即可看到图所示的软件环境
Gazebo软件环境
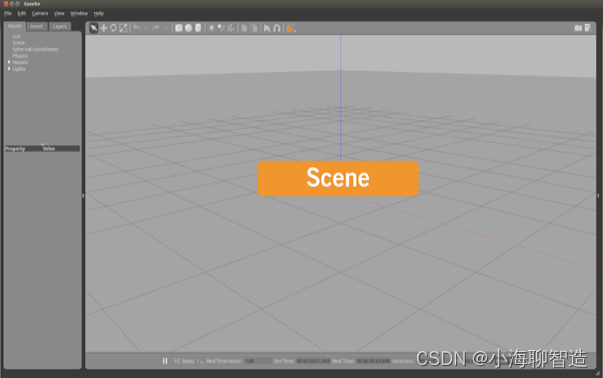
界面中间栅格部分为场景,作为模拟器的主要组成部分,场景是模拟对象被放置的地
方,也是用户与模拟器交互的可视化区域,如图
场景界面
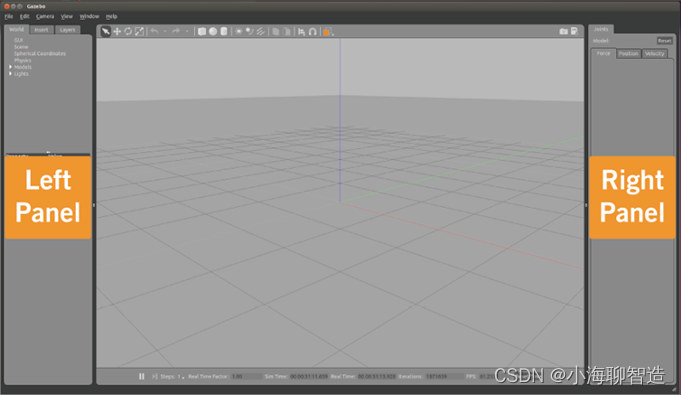
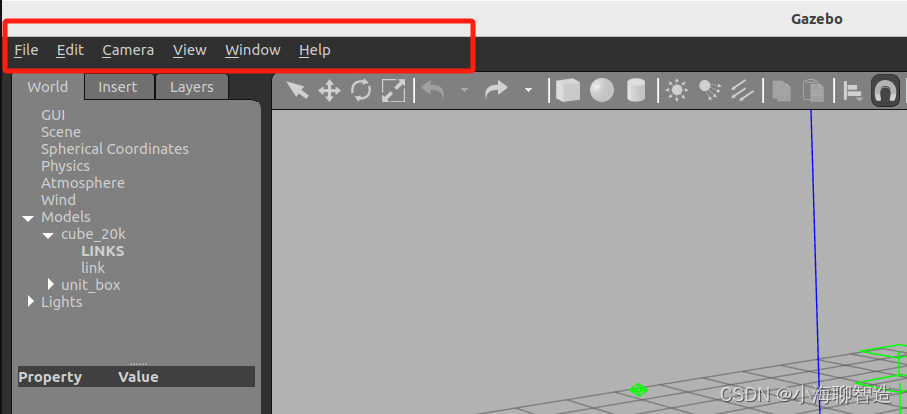
通过拖动左右两侧面板的控制条,可以显示、隐藏面板或调整面板大小。在启动
Gazebo时,默认显示左侧面板隐藏右侧面板。如图所示,右侧面板主要是在场景中当
物体被选中时才会弹出来,用于设置被选对象的属性;左侧面板主要由以下3个部分构成。
● World:“世界”选项卡显示当前在场景中的模型,并允许查看和修改模型参数,比
如它们的姿势。还可以通过展开“GUI”选项调整相机姿势来更改相机视图角度。
● Insert :向模拟添加新对象(模型)的位置插入选项卡。要查看模型列表,需要单击
箭头小图标以展开文件夹,在要插入的模型上单击并释放,然后在场景中再次单击以
添加它。
● Layers:“层”选项卡组织和显示模拟中可用的不同可视化组。一个层可以包含一个
或多个模型,打开或关闭图层将显示或隐藏该图层中的模型
控制面板
选项卡与工具条
Gazebo主要有两个工具条,分别位于场景的顶部和底部。场景顶部的工具条具体操作
功能如图所示。
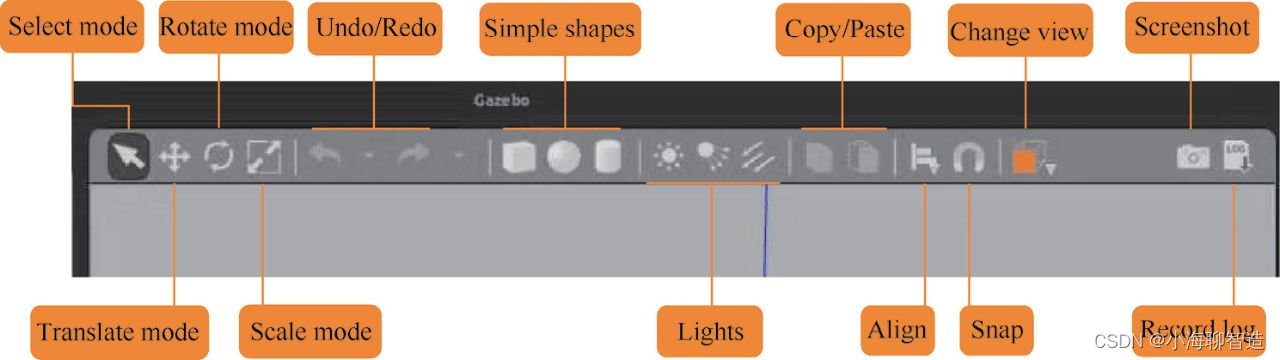
各个操作的具体含义如下。
● Select mode:选择模式,用于选择操作对象。
● Translate mode:选中物体并移动。
● Rotate mode:选中物体并旋转。
● Scale mode:选中物体进行缩放。
● Undo/Redo:撤销/重做操作。
● Simple shapes:一些可供拖进场景的内置简单几何体。
● Lights:对场景添加灯光操作。
● Copy/Paste:复制/粘贴选中的对象。
● Align:对齐场景中的模型。
● Snap:捕获模型。
● Change view:改变观察场景的视角。
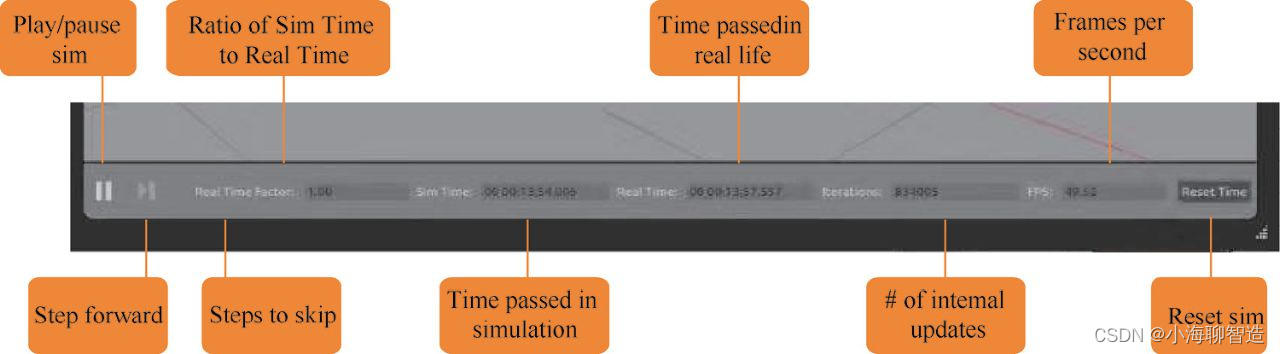
场景底部的工具条主要用于设置仿真时间和步长等,具体如图所示。
和大多数应用一样,Gazebo的最上方是菜单栏。菜单栏主要包含6个部分:File、Edit、Camera、View、Window和Help。每个部分具体操作说明如下。
(1)File(文件)
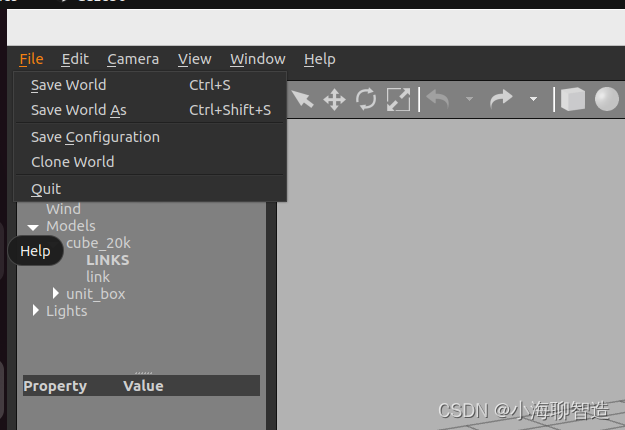
Save World(Save the world as-is):保存环境。
Save World As(Save the world as-is & provide a name):环境另存为。
Save Configuration(Save your Gazebo interface configuration):保存配置。
Clone world(Start new simulation from the current state):复制环境。
Quit(QuitJclose Gazebo):退出。
(2)Edit(编辑)
Reset Model Poses(Reset models to original poses; do not reset time):重复模型位姿。
Reset World(Reset everything in world; reset time):重置环境。
Building Editor(Construct a building):构建编辑器。
Model Editor(Build an articulated object):模型编辑器。
(3)Camera(相机)
Ormographic(View the scene with no perspective):无透视情况下查看场景。
Perspective(View scene with perspective projection):透视情况下查看场景。
FPS View Control(Control view as First-person Shooter: WASD keys & mouse):第一视角。
Orbit View Control(Control view by rotating around a point with the mouse):旋转视角。
Reset View Angle(Move view to the initial):重置视角。
(4)View(显示)
Grid(Display ground plane grid):栅格。
Origin(Display world origin):原点。
Transparent(Display models as transparent):透明。
Wireframe(Display models as wireframe):显示线框。
Collisions(Display model collisions):显示碰撞。
Joints(Display model joints):显示关节。
Center of Mass(Display model centers of mass):显示质心。
Inertias(Display model inertias):显示模型惯性。
Contacts(Display collision points):显示碰撞点。
Link Frames(Display coordinate frames for links):显示链接的坐标系。
(5)Window(窗口)
Topic Visualization(Visualize messages being published per topic):话题可视化。
Oculus Rift(Integrate an Oculus Rift):虚拟现实。
Show GUI Overlays(Show overlays from GUI Plugins):界面插件显示。
Show Toobars(Show/hide top & bottom toolbars):工具显示。
Full Screen(Make the Scene full screen):全屏。
(6)Help(帮助)
Hotkey Chart(Open hot key chart):快捷键表。
About(View info about Gazebo):相关信息。
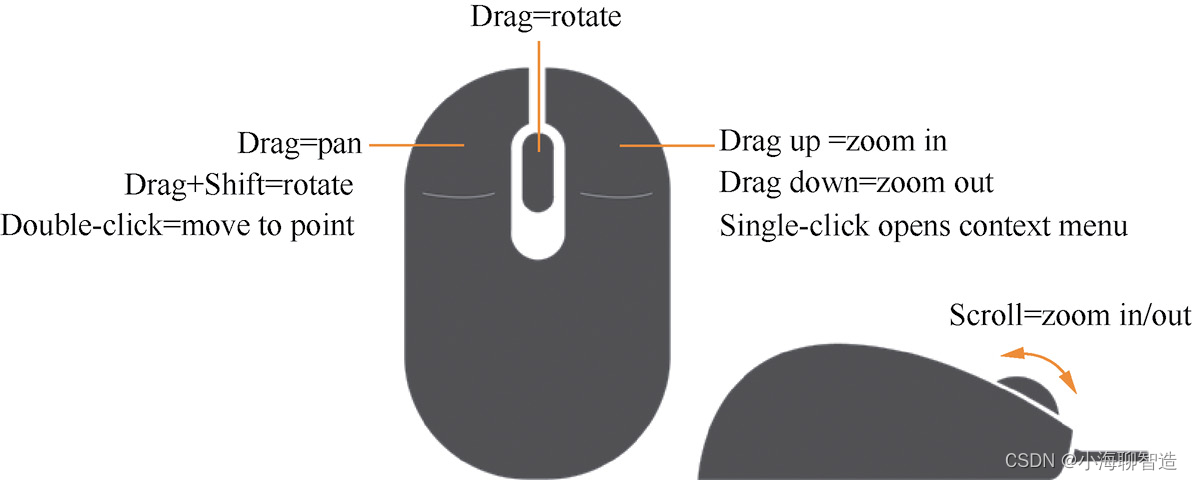
使用Gazebo进行物体运动模拟时,需要选中模型并修改参数等,因此需要频繁地使用
鼠标操作。Gazebo中对应的鼠标操作说明如图所示。
鼠标操作
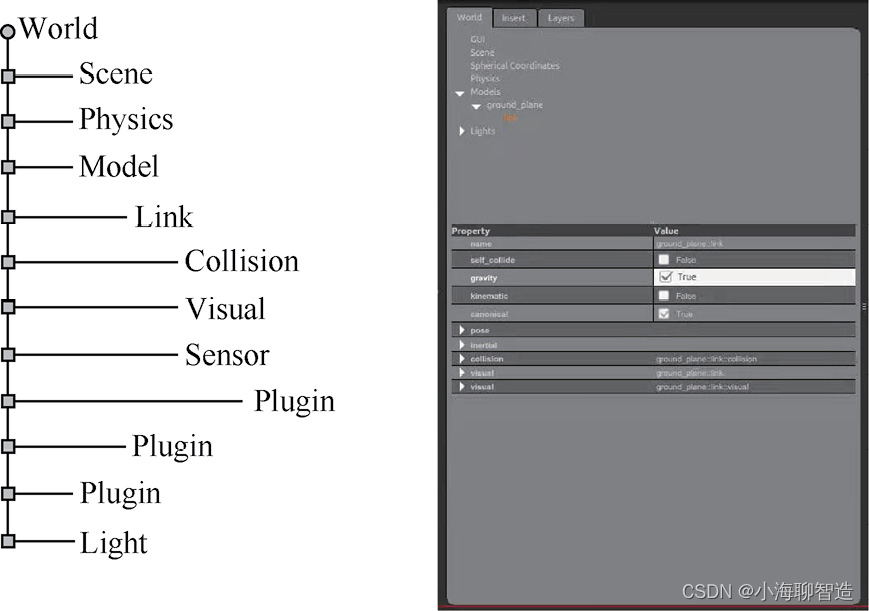
模拟场景组成元素
模拟场景通常被称为世界,开发者可根据自己的需求设计不同属性的世界环境。
世界通常包含的组成元素有World、Models、Links、Collision Objects、Visual Objects、Sensors和Plugins,其组织结构如图所示
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- gitee提交代码步骤介绍(含git环境搭建)
- Vue 3 + Ts 钩子函数(hooks)的用法,以<script setup lang=“ts“/>语法糖形式 #reactive #ref
- 单片机相关知识点
- 算法训练营Day39(动态规划2)
- 具有超低功耗性能的R7F102GAC3CSP、R7F102GAC2DSP、R7F102G6C3CSP RL78/G22微控制器 16-bit MCU
- [Java]最长连续升序整数序列
- 详解YOLOv5网络结构/数据集获取/环境搭建/训练/推理/验证/导出/部署
- Ubuntu宝塔面板本地部署Emlog博客网站结合内网穿透实现远程访问
- 中国人民大学与加拿大女王大学金融硕士——行动胜过空谈,付出必将有回报
- 32. 深度学习进阶 - Transfer Learning