惯性导航基础知识学习----03 INS的初始对准
🌈武汉大学惯性导航课程合集是入门惯导的精品课程~ 作为导航路上的鼠鼠我,要开始学习惯性导航了~ 需要达到的要求是大致了解惯导的原理等~ 后期会陆续更新惯导相关的知识和笔记等~
🐬 本blog为 武汉大学惯性导航课程 的记录~ 感谢团队提供的开源课件ppt和相关代码~
??概览:惯性器件的误差和标定(下)
??省流:1??介绍INS初始化的一个过程,定义了姿态角;2??介绍了静态粗对准相关以及初始对准的影响因素3??双矢量定位姿原理
🍭这门课程讲的真的很好,墙裂建议惯导新手入门 加油加油~ (●ˇ?ˇ●)
🌴这篇文章简要介绍了一下惯导~ 我觉得写的不错~ 大家可以看看形成一个大体的认识
INS的初始对准
文章目录
初始对准其实是初始化的一部分。
惯导的初始化
🍎初始位置:给定(例如从GPS)
🍐初始速度:零(静止状态)或给定
🍒初始姿态:初始对准
1??粗对准vs精对准
2??静止状态 vs 运动状态
3??重要性:失之毫厘,谬之千里
姿态:两个坐标系的角度关系
??关于姿态角
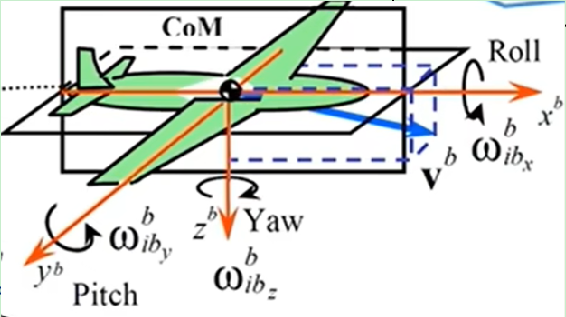
1??航向角:冲着当地正北 绕着z轴自转航向 北偏东为正
2??俯仰角:车头抬起为正
3??横滚角:绕着当前载体的纵轴 右翅膀下压为正
静态粗对准
??先确定水平面 俯仰角 和横滚角 ;再确定航向角
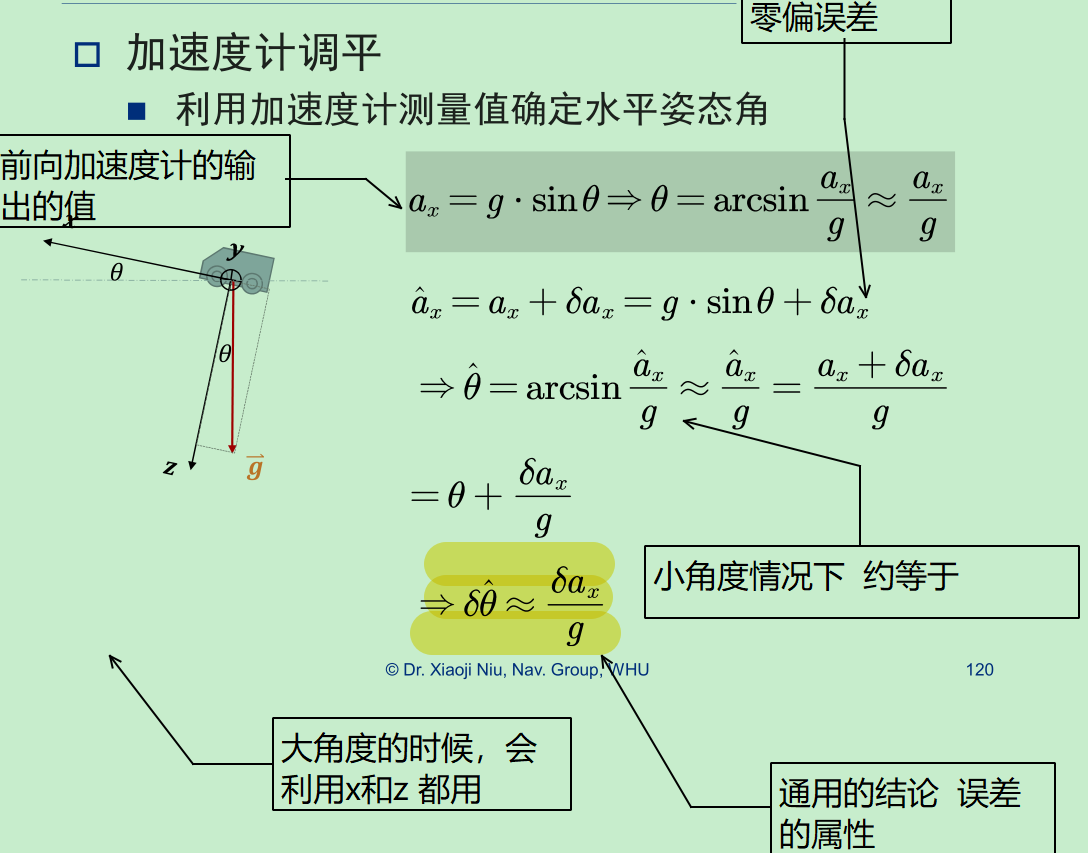
加速度计调平
确定水平面 俯仰角 和横滚角
通过感应重力加速度找到水平面
陀螺罗盘
确定航向角
通过感应地球自转角速度找到航向
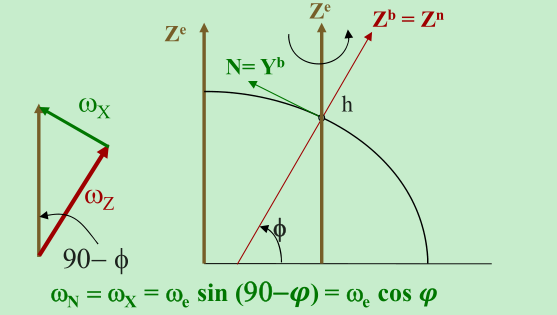
🍎地球自转可以由三轴陀螺感知出来,记作we 分解到N方向为: wecosφ 分解到E方向为wesinφ
🍒在水平面(也就是N E平面 已经由加速度计测量出来了)X和Y方向的陀螺就可以感知到地球的加速度分量 如下图所示,从而反向推断出确定出航向角的大小

??本质:用投影到水平面的两个陀螺测量分量来对投影到水平面上的地球自转的水平分量来进行感知,来推测出航向角。
战术级 1deg/h
导航级 0.01deg/h
航向角精度依赖于:
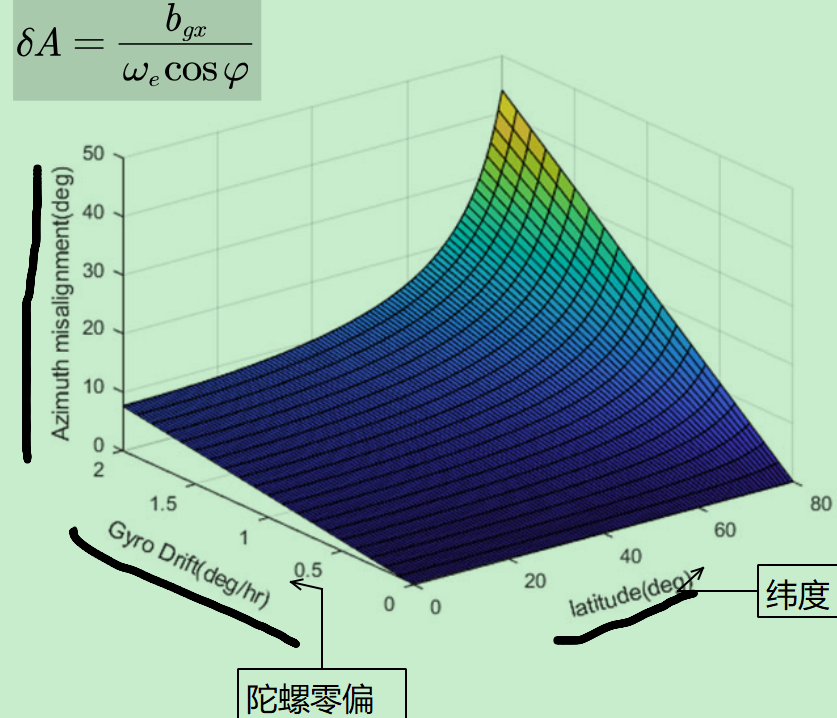
初始对准的影响因素
陀螺噪声对初始对准的影响——对准时间
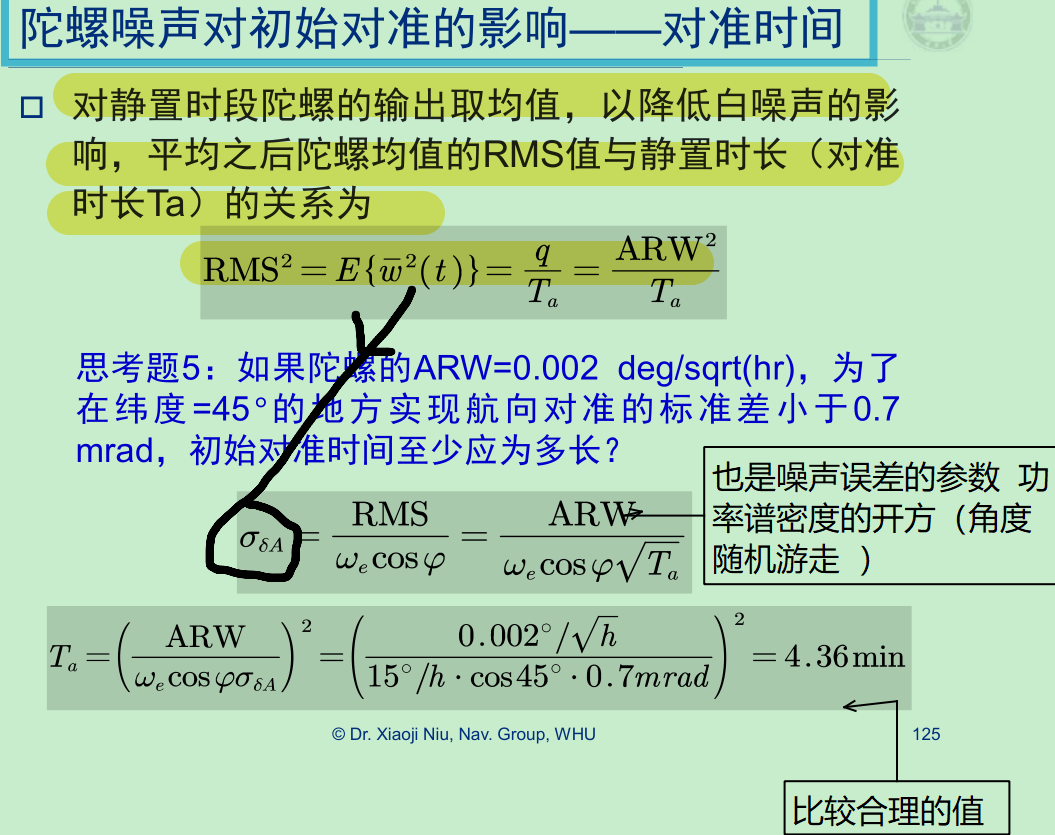
静基座对准的航向角精度取决于?
?陀螺 (东向轴) 零偏
?纬度 (φ)
?陀螺角度随机游走 ( ARW)
?对准时间
?加速度计调平精度
?载体的晃动
双矢量定姿原理
静态解析粗对准—双矢量定姿
姿态:反映的是两个坐标系的角度关系
两个坐标系(这里是载体坐标系和北东地坐标系)对同一个向量进行观测;求解获得同一个向量在两个坐标系的投影。
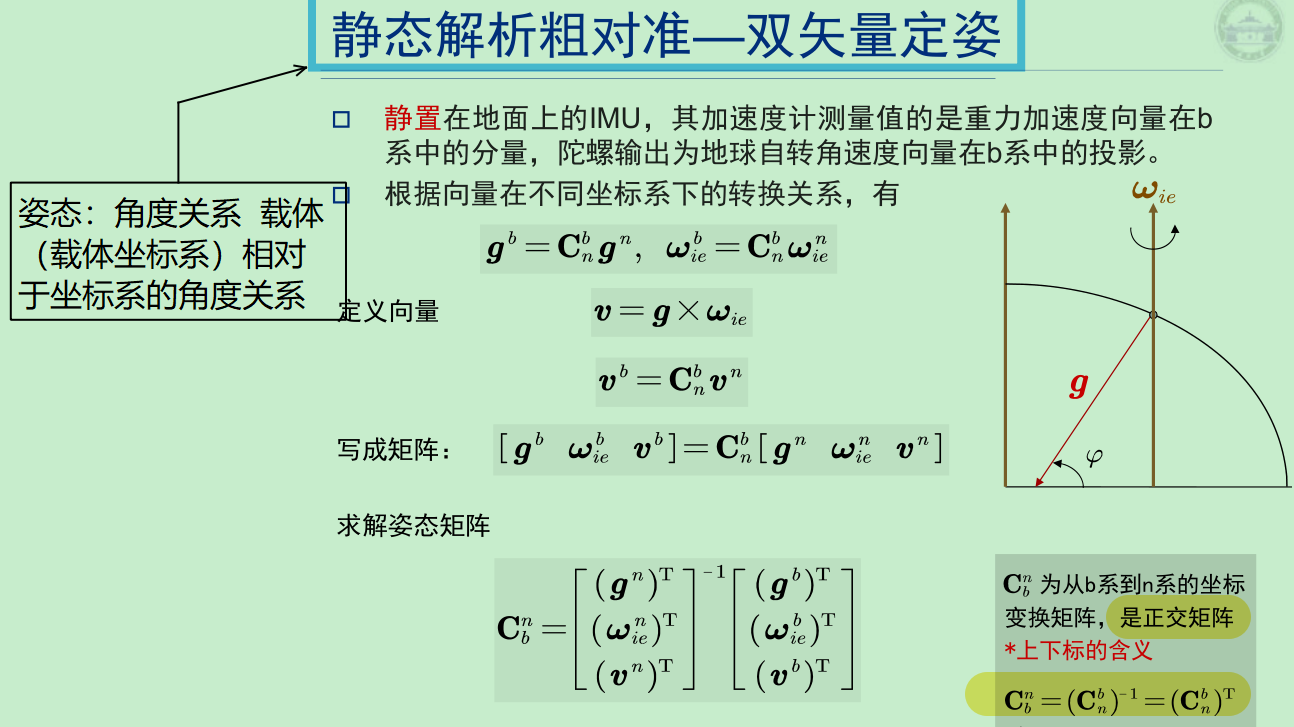
载体坐标系(我们的惯性器件已知,能测出来)
北东地坐标系(只要知道纬度,大概就知道)
知道两个坐标系和一个矢量,就可以大概知道载体的姿态
向量需要线性无关的
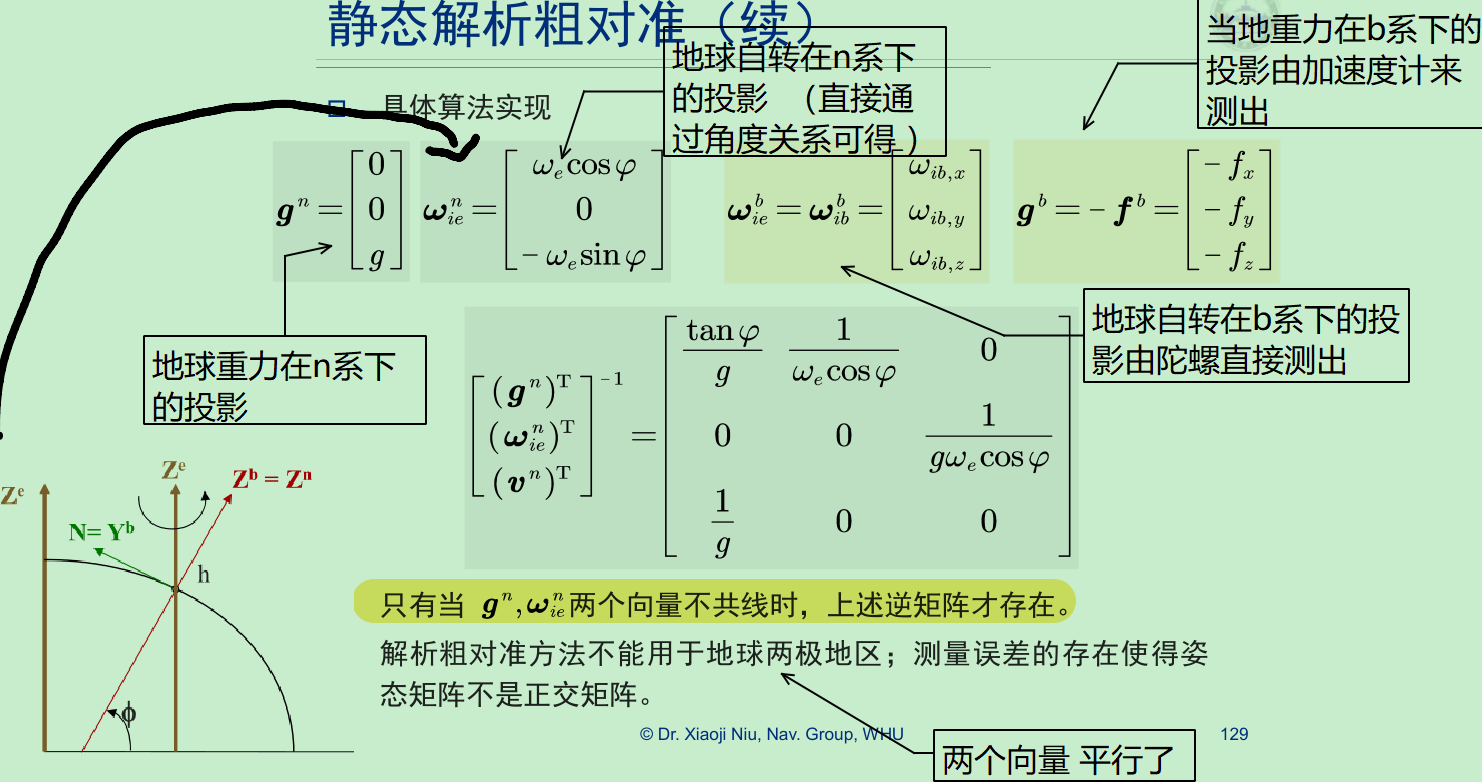
🌿几个坐标系的简称:
载体坐标系(b 系)
导航坐标系(北东地)(n 系)
惯性坐标系(i 系)
地心地固系(e 系)
为了使得数值更加精准,采用数值稳定性处理:
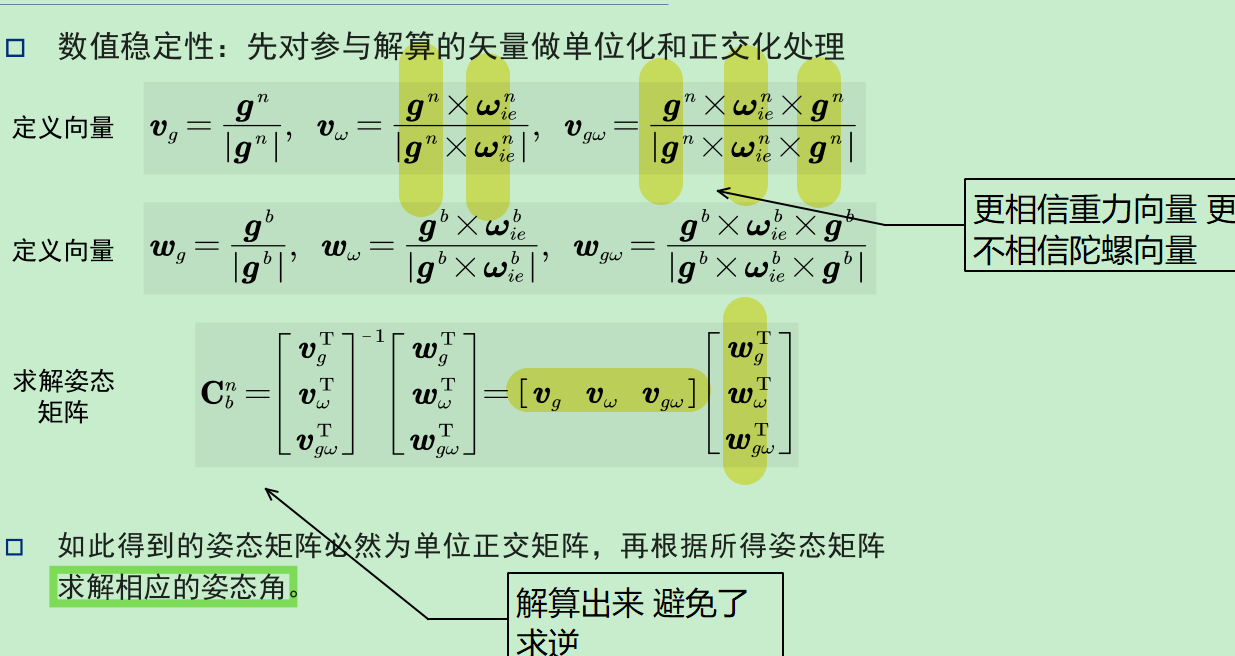
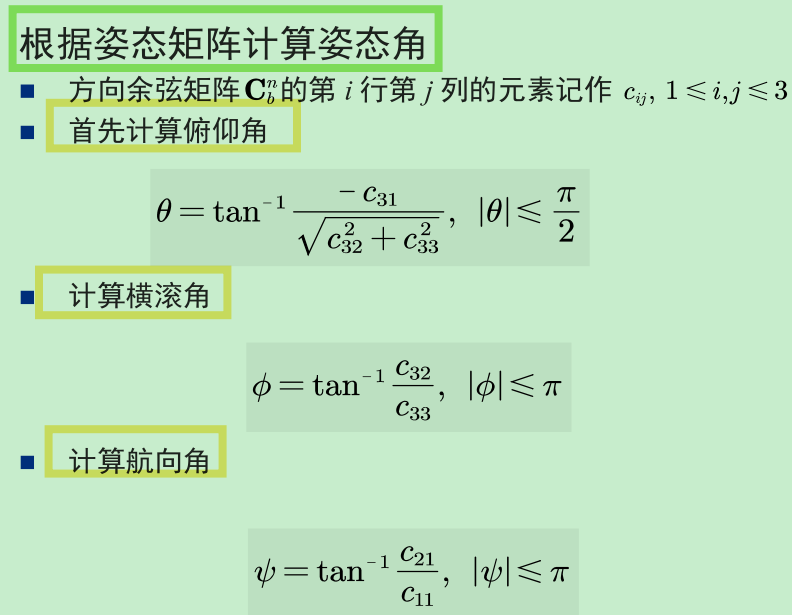
根据姿态矩阵计算姿态角
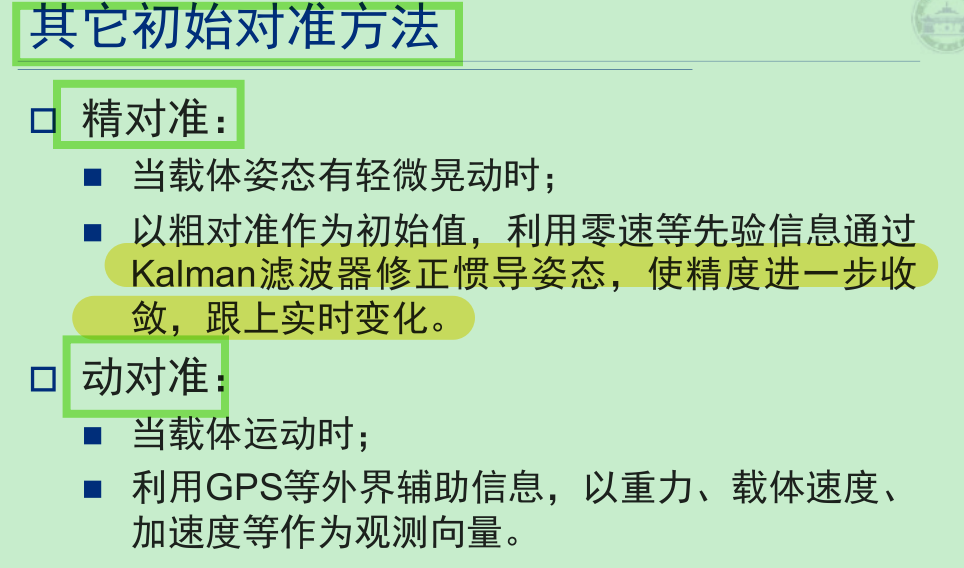
其他对准的原理
🌈ok,完结~点个赞 (●ˇ?ˇ●)点个赞 (●ˇ?ˇ●)
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- QT C++中调用python脚本时,import第三方库失败问题解决
- 工作三年的我在思考,前端还值得学习吗
- go语言实现文件复制、移动(cp、mv命令)
- 良心推荐!五个超好用的Vue3工具
- matlab plot绘图显示改为对数形式
- CorelDRAW2024国内专业免激活版下载安装教程
- Linux之进程管理
- AI绘画创作,训练Lora模型绘制你心中的童年爱豆漫画
- 绝地求生:天使与恶魔套装评测: 面具名片均可单买!
- Python语法进阶学习--模块和包