RobotStudio机器人码垛课程设计
发布时间:2024年01月11日
一、任务需求
1、创建动态夹具(600*400*50)
2、创建物料(600*400*200)
3、起码按顺序码垛放置 4 个不同位置

二、软件常用操作及其快捷键
(推荐自己按这些步骤操作一下,能明白这些操作的具体意义)
ctrl+鼠标左键:全局拖动
ctrl+shift+鼠标左键:切换视角
xyz三个方向拖动物品需要在基本菜单栏的Freehand中打开这个选项
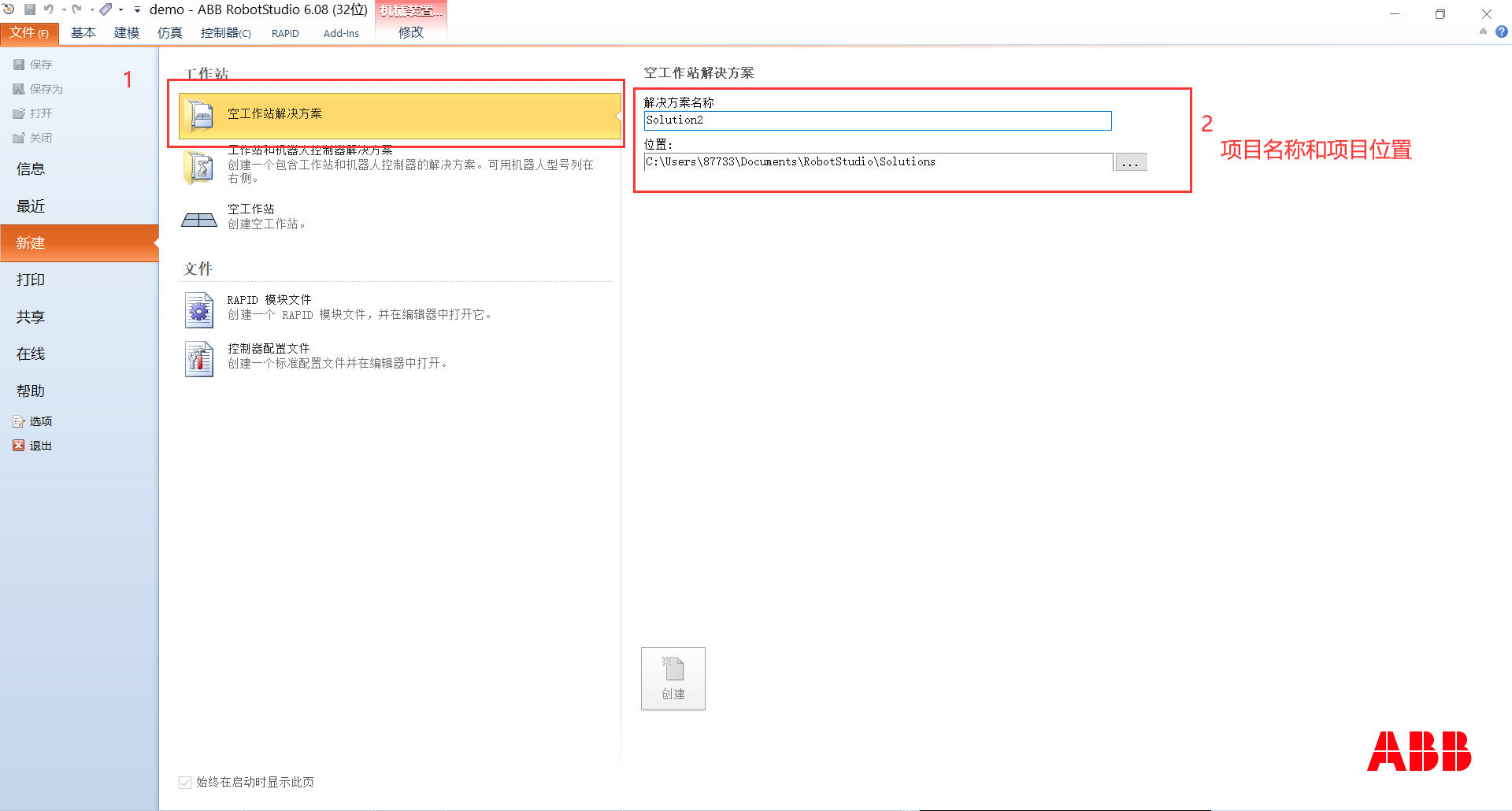
二、系统创建过程
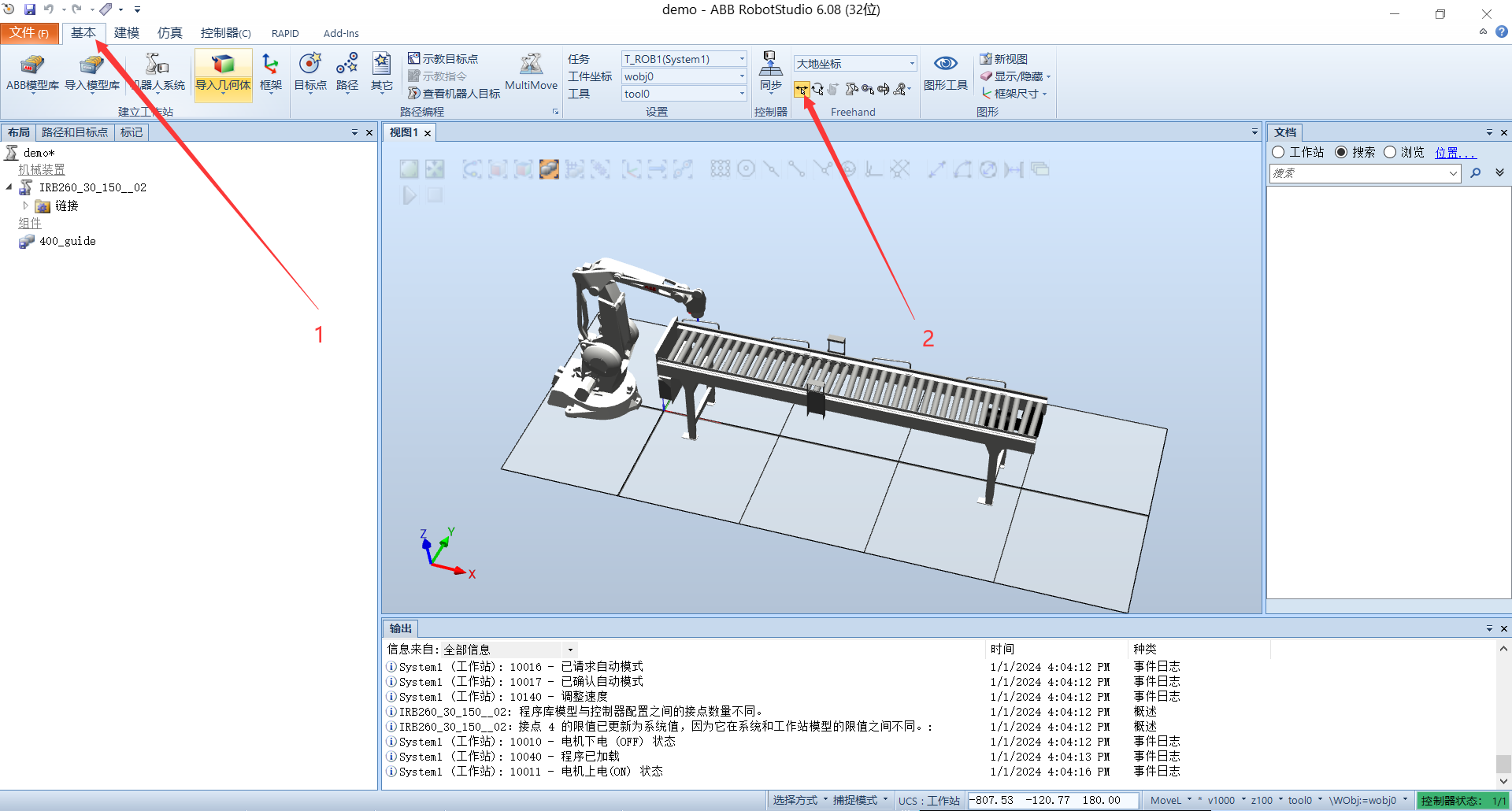
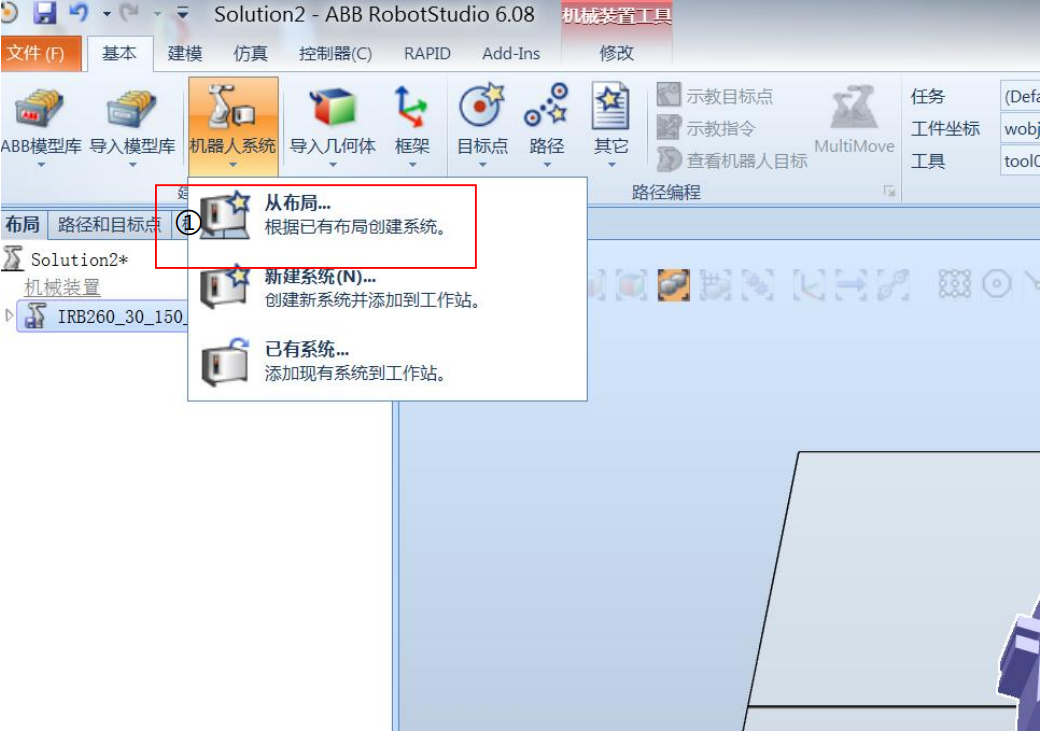
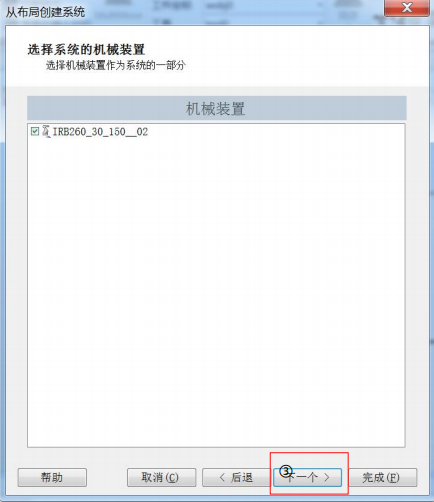
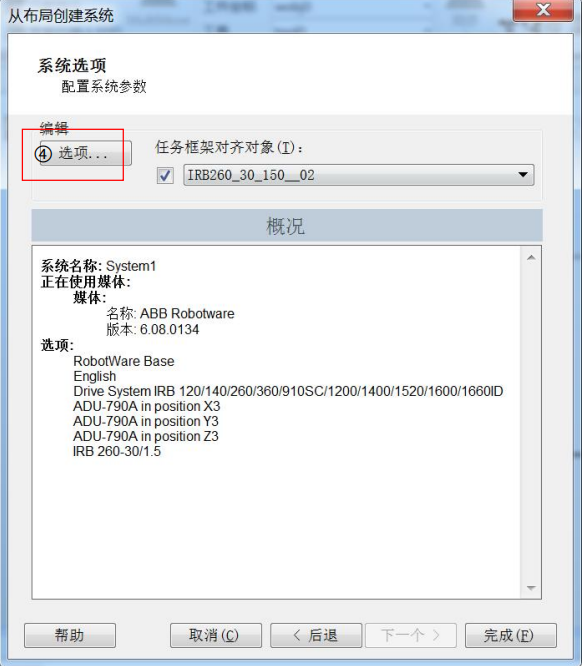
2.1 创建机器人系统
2.1.1 从ABB模型库中导入IRB260机器人

将传输链和机器对齐一下,不用完全对齐,歪一点也没事。
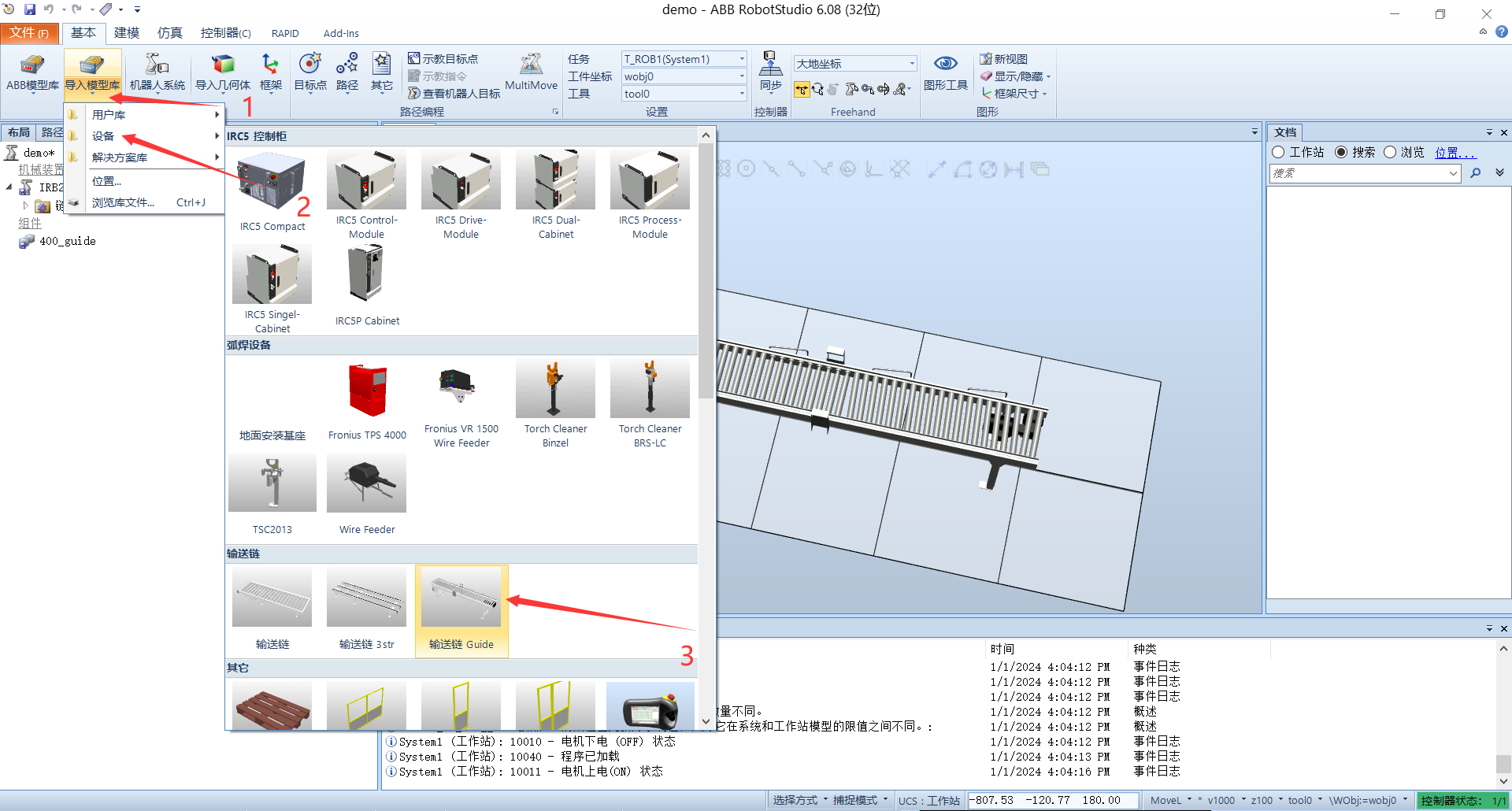
2.1.2 导入模型库中的传输链
添加输送链:《导入模型库》→《设备》→《输送链》
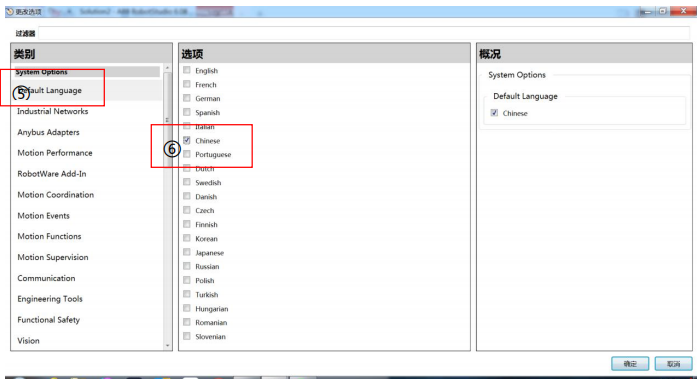
2.1.3修改机器人属性


2.2 创建物件并调整位置
2.2.1 创建物料
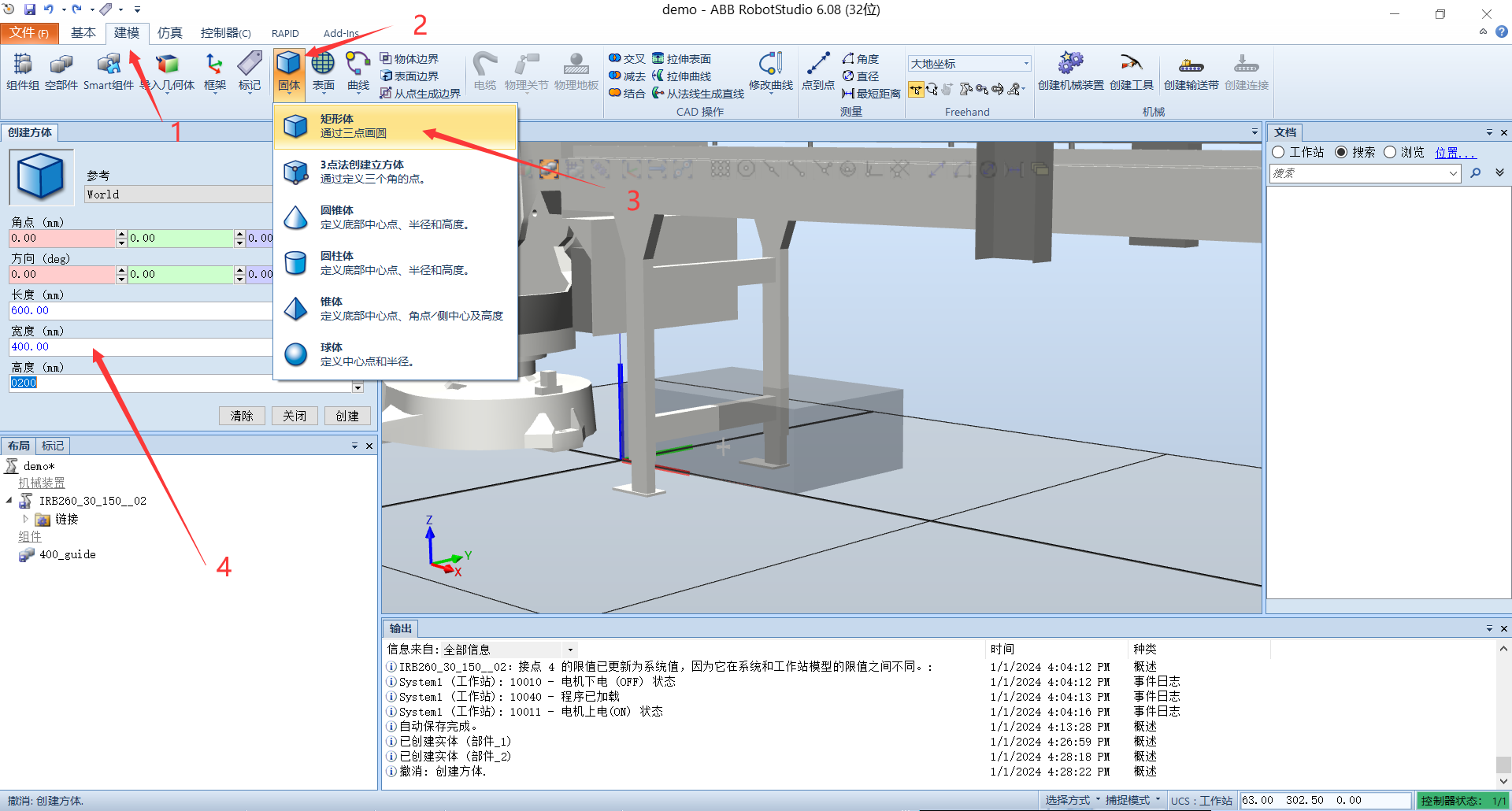
2.2.2 修改位置
将物料位置调整到传输带起始端
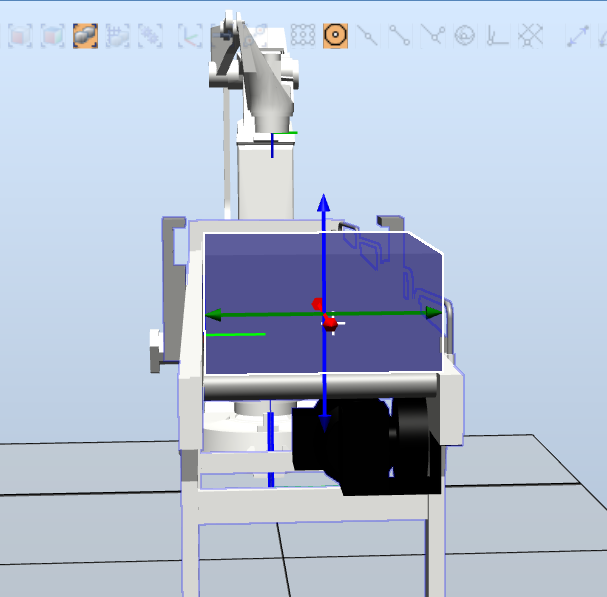
2.2.3 设置物料本地原点
物料的复制,传送都是相当于物料的本地原点在世界坐标系下的运动。因此应该先设置好物料的本地原点。
鼠标右键点击布局浏览器下的物料→左键点击修改→左键点击设定本地原点

原点捕捉方式选择“捕捉中心点”

2.2.4 添加一个smart组件
在建模选项卡下选择 Smart 组件,创建一个新的Smart组件,重命名为“SC_输送链”。

2.2.5 添加source组件

①、选择设计,在下方空白处点击鼠标右键
②、选择动作
③、选择 source 组件
④、source 组件属性设置
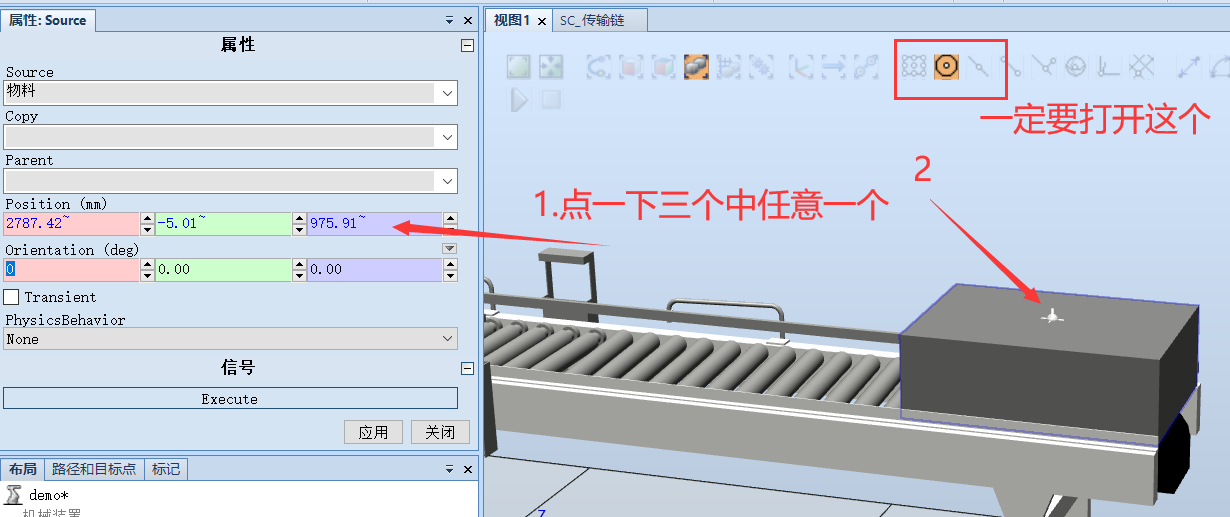
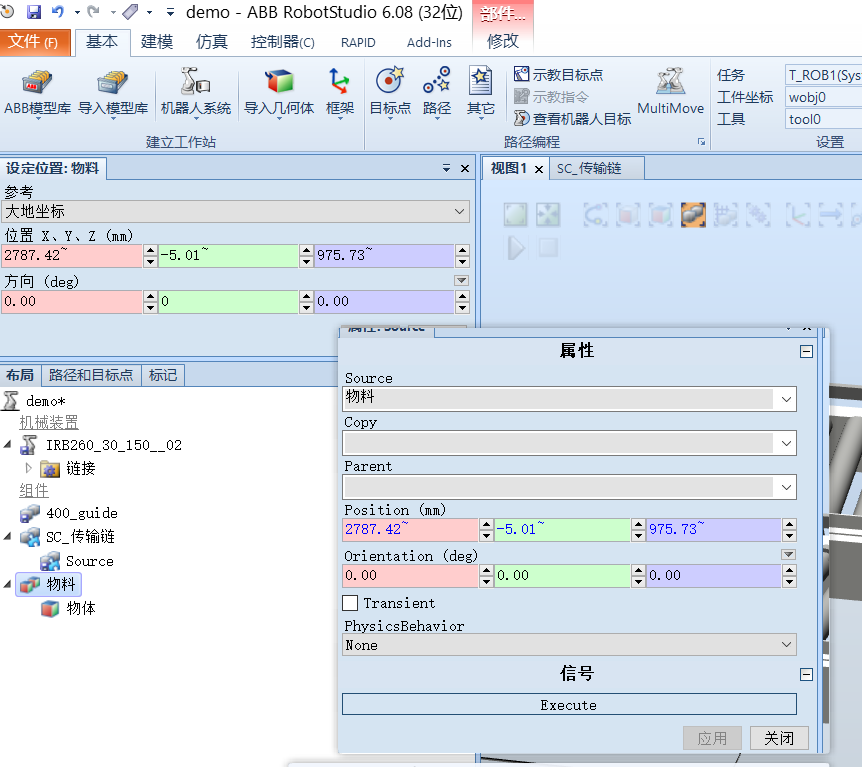
2.2.6 source属性修改
选择物料

物料事先摆放在出料的位置 Source,position 坐标为复制物料的位置,应和物料位置一致
这里不要一个个去复制物料的xyz位置,先用鼠标点一下position的任意一个框,然后再点一下物料的中心就可以(前提是打开捕捉中心,前面有讲)
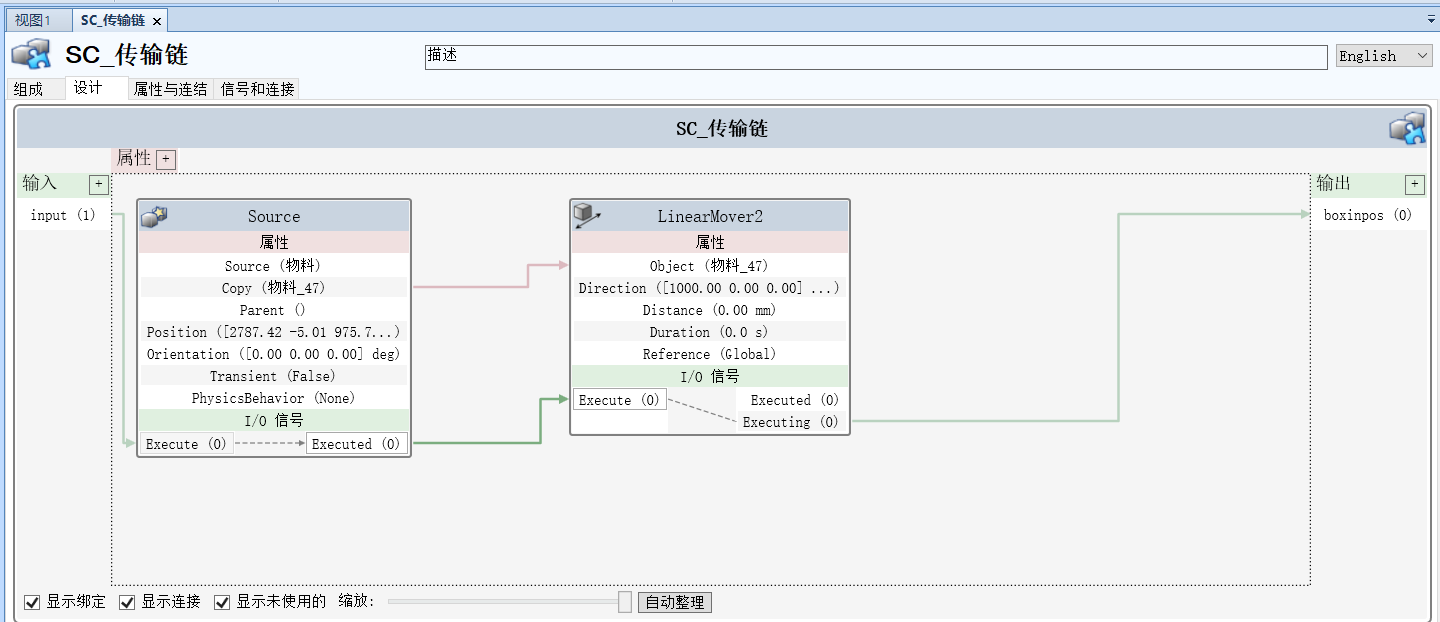
2.2. 添加LinearMover2
设置【Direction】,X 坐标值设为-1(表示朝 x 轴负方向移动),
设置【Distance】2300mm(表示物料位移的距离)
设置【Duration】5S(表示物料位移时间)

2.2. 设置输送链不能被传感器检测(为了避免传感器检测误检测)

2.2. 设置信号连接
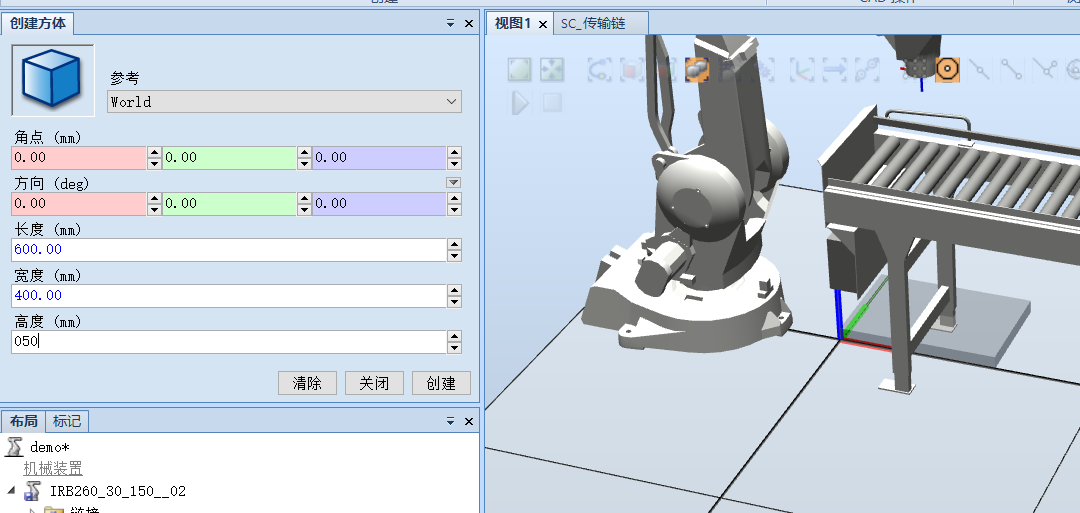
2.3 创建动态夹具
2.3.1 创建一个吸盘工具(600*400*50)
2.3.2 设定模具本地原点在模具上方中心点位置


2.3.3 安装工具到机器人末端法兰上
直接拖动夹具到机器人上就可以
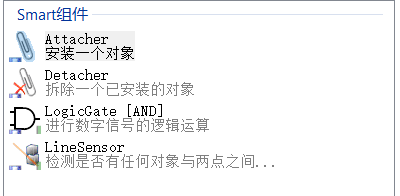
2.3.4 添加夹具 Smart 组件
添加下列组件
2.3.5 修改组件属性
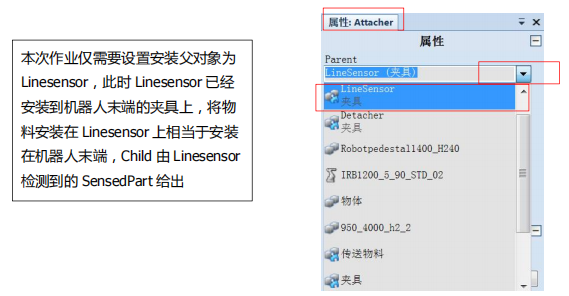
2.3.6 线传感器设置属性
2.4 添加IO
2.5 连接工作站逻辑
2.6 示教目标点设定路径
2.7 RAPID编程
文章来源:https://blog.csdn.net/struggle_success/article/details/135325893
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!