SLAM中三角测量求解特征点世界坐标系下坐标Pw的方法
一.SVD分解法
1.SVD分解的介绍
 ???
???
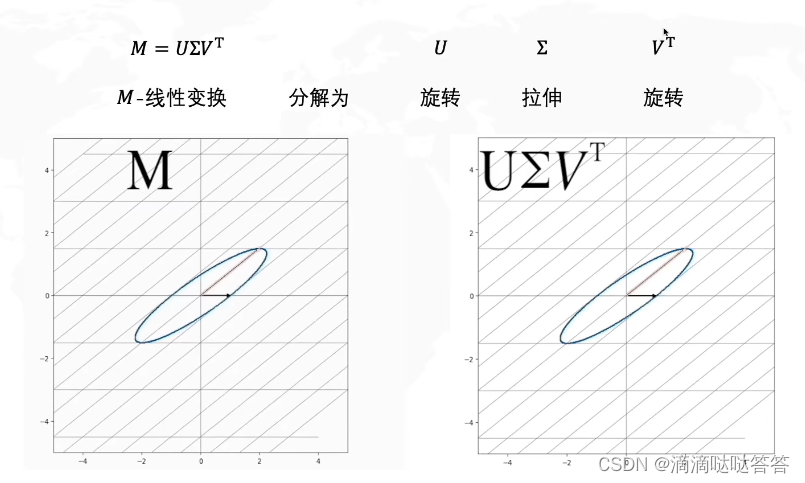
SVD分解的本质就是将一个线性变换 M 分解为旋转 左乘拉伸
再左乘旋转U。

??? U和V都表示旋转,均为单位正交矩阵,即满足
,
,
??? 有时也称作酉矩阵(Unitary Matrix)(矩阵的共轭转置(也称为厄米共轭或伴随矩阵)等于其逆矩阵。
??? ?
?
的性质如下图中所示:
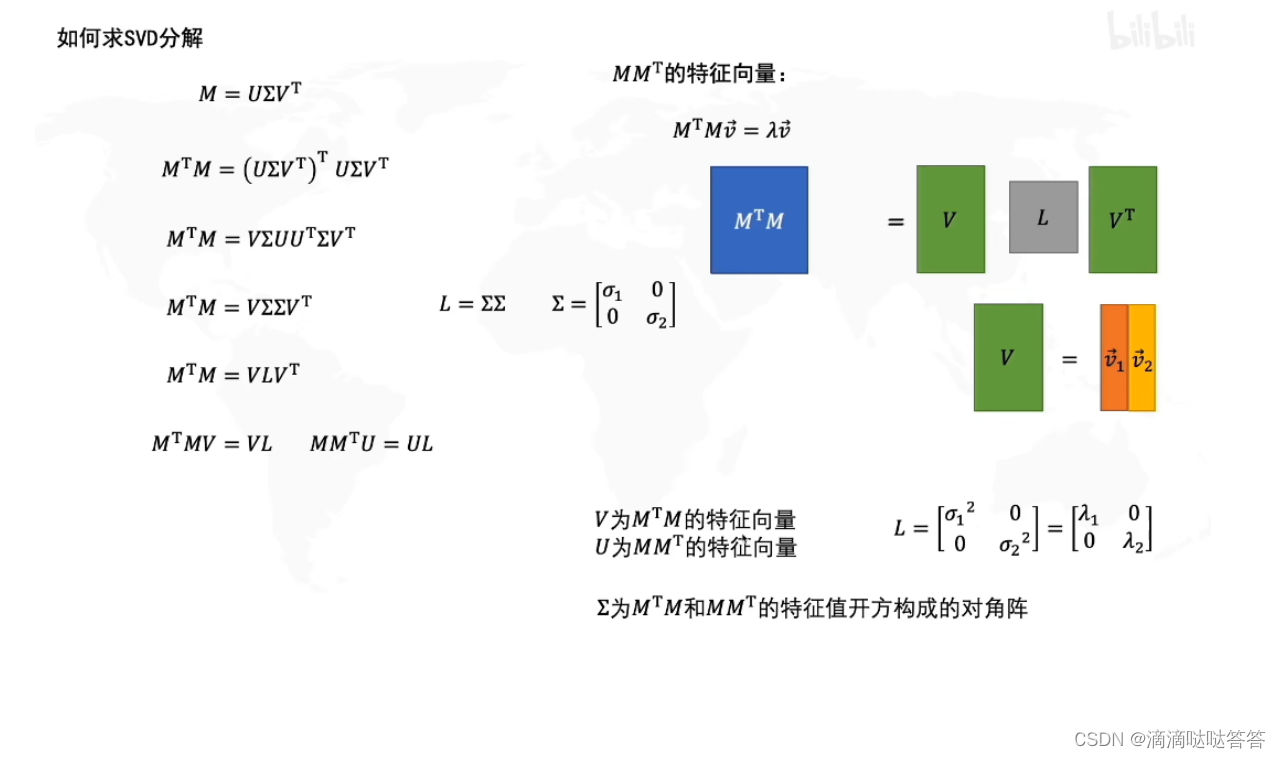

???
求矩阵M的SVD分解的步骤如下:

?2.SVD分解法的推导


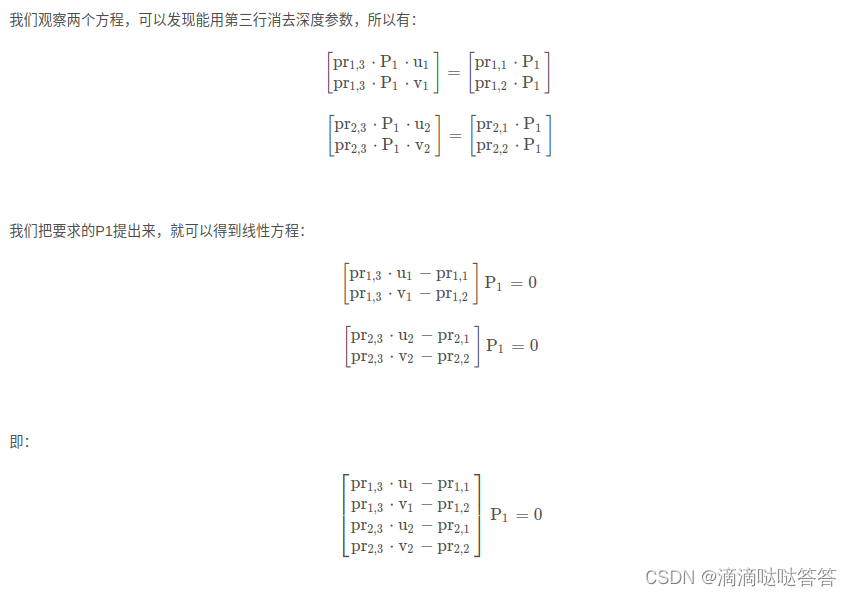

?注意:
???????? 这里的pr1和pr2表示的含义如下,此时,对应的u和v为特征点在像素坐标系下的坐标

??????? 当pr1和pr2表示的含义如下时(即不包括相机内参时),对应的u和v变为特征点在归一化坐标系下的坐标?

3.SVD分解法的求解
??? 先给出结论:Ax=0的最小二乘解是最小特征值对应的特征向量
??? 取SVD分解得到的V矩阵最后一列作为 P 1的解,但我们还需要归一化以后才能使用。
??? 对于超定方程Ax=0,没有真正的非零解析解,因为约束太多,没法都满足(零向量除外),求其最小二乘解近似。
理论推导部分
齐次方程组形如: A x = 0 。
在一些优化,拟合等问题中经常出现,我们常考虑方程多于未知数元数的情况------超定方程组。
首先对于平凡解x=0我们一般不感兴趣,一般我们会寻求方程组的非零解。
如果x是方程组的一个解,那么对于 V k ∈ R , kx也是齐次方程组的解,一个合理的假设是只求满足? 的解。
假设A的维数是 m × n ,一般的 m > n (超定),没有真正的非零解析解。当没有精确解的时候,我们通常求其最小二乘解,描述为:
求使||Ax||最小化并满足||x||=1的 x
先介绍一个引理,即对于一个酉阵 p()和一个向量x(向量维数等于P列数),有:
?

至此,求解完毕。
参考:
????? 【学长小课堂】什么是奇异值分解SVD--SVD如何分解时空矩阵
????????奇异值分解(Singular Values Decomposition,SVD)
????????SLAM--三角测量SVD分解法、最小二乘法及R t矩阵的判断
????????奇异值分解(SVD)方法求解最小二乘问题
????????????????
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【一步一步学】ROS 的SSTP 介绍与应用
- 基于ssm图书管理系统的设计与实现论文
- GitHub Copilot 与 ChatGPT:有什么区别?
- 软件测试中的黑盒与白盒测试
- 【VTK】一文理解VTK中的轮廓(Contour)
- c++输入输出流和文件操作总结
- vue-vben-admin 与.net core 结合实例 【自学与教学 小白教程】---第4节---部门管理
- 优雅的替代System.currentTimeMillis() 统计代码耗时
- 并发编程(二)互斥体解决线程同步问题
- 如操作系统的心跳,运行状况无可逃避:Shell脚本揭示系统鲜活秘密!