13. 强化学习编程实验1-在格子世界中寻宝(1)
文章目录
1.实验目的
- 了解强化学习算法的基本框架;
- 掌握策略迭代算法的编程技术;
- 掌握值迭代算法的编程技术;
- 理解策略迭代与值迭代的异同;
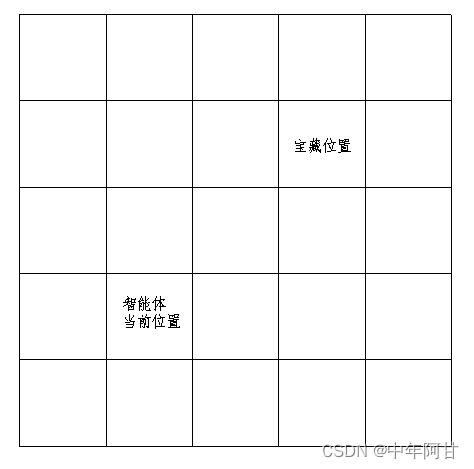
2.任务描述
有一个网格,它是1个含有
n
n
n行
n
n
n列单元格的方阵,方阵中的单元格
(
i
,
j
)
(i,j)
(i,j)(第
i
+
1
i+1
i+1行,第
j
+
1
j+1
j+1列,
0
≤
i
,
j
≤
n
?
1
0\le i,j\le n-1
0≤i,j≤n?1)有宝藏,有1个智能体,当前所处的位置为
(
a
,
b
)
(a,b)
(a,b),
0
≤
a
,
b
≤
n
?
1
0\le a,b\le n-1
0≤a,b≤n?1,该智能体可上下左右移动,每次只能从其当前单元格移动1步,到达与当前单元格相邻的单元格(若当前单元格处于方阵边缘,且智能体移动时超出方阵范围,则智能体只能回到当前单元格)。该智能体一开始不知道宝藏的准确位置,也不知道网格边界有多大,它只能观测到其当前位置和当前位置是否为宝藏所在处,并从上下左右移动四个行为空间中选取1个动作,选取该动作后转向的下一个网格由环境决定。请你设计一套算法,为该智能体找出最优移动方向序列,使得该智能体能以最短的时间找到宝藏。
要求:
程序运行时,输入方阵行、列数
n
n
n、宝藏位置
(
i
,
j
)
(i,j)
(i,j)、智能体当前位置
(
a
,
b
)
(a,b)
(a,b),即可按如下格式显示出规划好最优行为序列:
左→右→右→左→
?
\cdots
?
并以可视化的方式显示出路径。
3.任务分析
任务分析要回答以下问题:
- 待求解的问题是多步决策问题否?若不是,则不宜采用强化学习算法解决,若是,则继续回答下述问题
- 环境是什么?环境的状态具有马尔科夫性吗?是否涉及行为选择?如果回答是,则继续确定如下问题答案
- 环境的状态如何表示?环境的状态空间是什么?智能体的行为(动作)如何表示,智能体的行为空间是什么?环境的状态转移函数如何表示?环境的立即回报如何表示?
3.1 待求问题是多步决策问题否
智能体每一步都需要作出行为选择(向上、右、下还是向左移动),因此,这是一个多步决策问题。
3.2 问题求解过程是一个马尔科夫决策过程
智能体每走一步前,要确定选取何种移动方向(行为),智能体未来的位置与当前位置有关,与历史位置无关,所以满足马尔科夫性。智能体每一步都需要作出行为选择,因此,这是一个多步决策问题。智能体在当前状态下找到宝藏,就能得到1个立即回报,找不到回报就为0。我们希望从当前位置位置开始尽早找到宝藏,这说明找到宝藏所需的步骤越多,得到的回报打的折扣越多)。
故而:- 上述问题可以用马尔科夫决策模型
<
S
,
A
,
P
,
R
,
γ
>
<S,A,P,R,\gamma>
<S,A,P,R,γ>描述
3.3 状态空间S的确定
这个环境是1个网格世界,由于智能体以找到宝藏为目标,而能否在智能体作出一个行为响应(上下作用移动1步)后找到宝藏,与智能体所处位置有关,因此,智能体所处位置可以看做是环境的状态,状态决定了其能否在下一步找到宝藏。
为此,需要1个量描述该状态,有两种描述方法:
(1)用整数对
(
a
,
b
)
(a,b)
(a,b)联合描述状态,a,b分别对应单元格的行、列索引号;
(2)用1个整数描述状态,该整数
z
z
z和单元格所在的行索引号
a
a
a、列索引号
b
b
b满足如下关系:
z
=
n
a
+
b
a
=
z
/
/
n
b
=
z
?
n
a
\begin{align*} z&=na+b\\ a&=z//n\\ b&=z-na \end{align*}
zab?=na+b=z//n=z?na?
/
/
 ̄
?
\underline{//}-
//??整除求商
本任务选择方法2描述状态,则
S
=
{
0
,
1
,
2
,
?
?
,
n
2
?
1
}
S=\{0,1,2,\cdots,n^2-1\}
S={0,1,2,?,n2?1}
S
t
=
k
S_t=k
St?=k:智能体当前位置为从上至下,从左至右计数的第
k
+
1
k+1
k+1个单元格
3.4 动作空间A的确定
A = { 0 , 1 , 2 , 3 } A=\{0,1,2,3\} A={0,1,2,3}:0~3依次表示向上、向右、向下、向左移动1步
3.5 状态转移概率P的确定
在给定状态s和行为a下,状态转移到其他每个状态(包括自身)的概率都是确定的,只有1个为1,其他为0。
例如,当单元格当前位置处于方阵中间时,采取动作A[0],转移到上方相邻单元格的概率就是1,转移到其他相邻单元格的概率就是0,采取其他动作转到下一个状态的概率,情况都类似;当单元格当前位置处于方阵边缘时,如左边缘时,向左移动,后续状态将保持为原先状态。
综上所述,状态转移概率可以通过一个函数实现。
3.6 立即回报R的确定
很显然,只要某个状态不是最终状态(宝藏所在处),立即回报都可以设为0,反之,立即回报设为1,也可以把宝藏所在处状态设为0,其他位置对应的状态立即回报设为-1。总之,要确保当智能体找到宝藏时,获得的立即回报值高于未找到宝藏时状态的立即回报,而且,只要没有找到宝藏,立即回报都应该是一样的。
本实验中,当智能体所处位置不是宝藏所在处,立即回报设为-1,反之,设为0。
3.7 折扣 γ \gamma γ的确定
本实验设
γ
=
1
\gamma = 1
γ=1。
问题:设为1表示未来回报都不打折,这样能评估越早找到宝藏越好这一要求吗?
答案:可以。
证明:
假设从当前时间步
t
t
t(当前时间步的立即回报不算)开始,到第
K
K
K步找到宝藏,则累积回报为:
G
t
=
∑
k
=
0
K
?
1
γ
k
R
t
+
k
+
1
G_t=\sum_{k=0}^{K-1}\gamma^kR_{t+k+1}
Gt?=k=0∑K?1?γkRt+k+1?
将
γ
=
1
,
R
t
+
m
=
{
?
1
0
<
m
<
K
0
m
=
K
\gamma =1,R_{t+m}=\begin{cases} -1\quad 0<m<K\\ 0 \quad m=K \end{cases}
γ=1,Rt+m?={?10<m<K0m=K?代入上式,得
G
t
=
R
t
+
1
+
?
+
R
t
+
K
=
1
?
K
G_t=R_{t+1}+\cdots+R_{t+K}=1-K
Gt?=Rt+1?+?+Rt+K?=1?K
可见,找到宝藏的时间越长,即K越大,累积回报
G
t
G_t
Gt?越小,因此,当立即回报按照上式取值,且
γ
=
1
\gamma =1
γ=1时,能累积回报能反映越早找到宝藏越好的需求。
思考:若
R
t
+
m
=
{
0
0
<
m
<
K
1
m
=
K
R_{t+m}=\begin{cases} 0\quad 0<m<K\\ 1 \quad m=K \end{cases}
Rt+m?={00<m<K1m=K?,即找到宝藏时,立即回报为1,没有找到立即回报为0,此时,还能取
γ
=
1
\gamma =1
γ=1吗?为什么不能?
4. 编程架构
本实验涉及到的程序的设计,采用面向对象架构。
为此,首先分析,程序运行中,有哪些对象?这些对象属于哪些类?然后定义类,最后在主程序中创建类对象,调用对象方法,解决问题。
4.1 程序中有哪些对象和类
根据强化学习原理,可知,在强化学习环境中,有两个最基本的对象,分别为:
- 环境
- 智能体
4.2 环境类的设计
本程序中的环境对象为格子世界,我给它命名为:GridWorld
很显然,单独为这个具体的环境对象设计一个具体类,通用性不足,因为还有其他的具体类(对应其他的环境),这类环境都可以用马尔科夫决策过程描述,即:它们都需要向用户提供几个
重要的方法:
get_state_space:返回状态空间
get_action_space:返回行为空间
get_state_trans_prob:返回状态转移概率
get_immediate_return:返回立即回报期望
get_gamma:返回折扣系数
因此,完全可以先定义一个描述马尔科夫决策过程(MDP)的抽象类MdpEnv,GridWorld继承自该抽象类,实现该抽象类的方法即可,以后若是有其他的MDP具体环境,只需要实现这些方法即可。
4.3 智能体类的设计
对于马尔科夫决策过程,智能体都需要通过环境的已知信息,即MDP五元组
<
S
,
A
,
P
,
R
,
γ
>
<S,A,P,R,\gamma>
<S,A,P,R,γ>,学到最优策略
π
(
a
∣
s
)
\pi(a|s)
π(a∣s),因此,各种算法(智能体)都有一个共同的抽象类:MdpAgent
它应该提供方法:
- learn:学习MdpEnv环境对象,并返回优化的策略
- find_optimum_action:根据当前状态,基于当前学到的策略,输出最优动作
策略迭代算法和值迭代算法,都可以看做是智能体,它们都从MdpAgent派生,只需要实现以上抽象方法即可。
好了,接下来就是发挥主动能动性,根据上述基本设计思想实现python程序了。暂时写到这里…
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Proxmox PVE 6.0 升级 6.4
- 聚道云软件连接器助力某品牌管理有限公司实现有赞对接三联打通
- 眼科医院/门诊部小程序,小程序开发需要实现哪些功能?
- OpenCV——八邻域断点检测
- [数据集][目标检测]白细胞检测数据集VOC+YOLO格式343张1类别
- 爱了!水浸监测这个技术,看了都说好!
- 算法第十七天-构造有效字符串的最少插入数
- Vue3+SpringBoot实现文件上传详细教程
- transbigdata笔记:栅格参数优化
- 【华为OD机试真题2023C&D卷 JAVA&JS】开源项目热榜