C++ opencv-3.4.1 提取不规则物体的轮廓
发布时间:2023年12月25日
在学习opencv的时候,对一张照片,需要标注照片上物体的不规则轮廓。
如图:

使用opencv进行物体的轮廓处理,关键在于对照片的理解,前期的照片处理的越好最后调用api出来的结果就越接近理想值。
提取照片中物体分如下三步:
- 图像去噪,高斯模糊
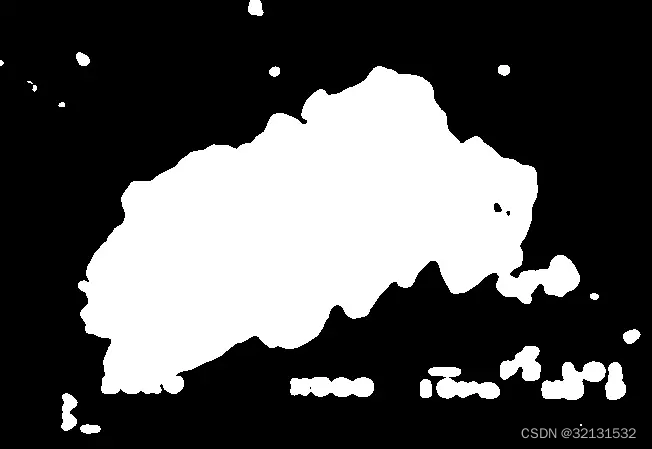
- 二值化
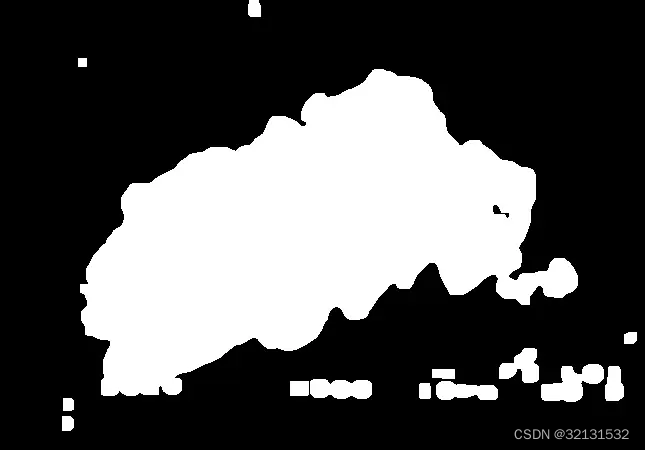
- 去除噪点,形态学操作,去除较小的噪点
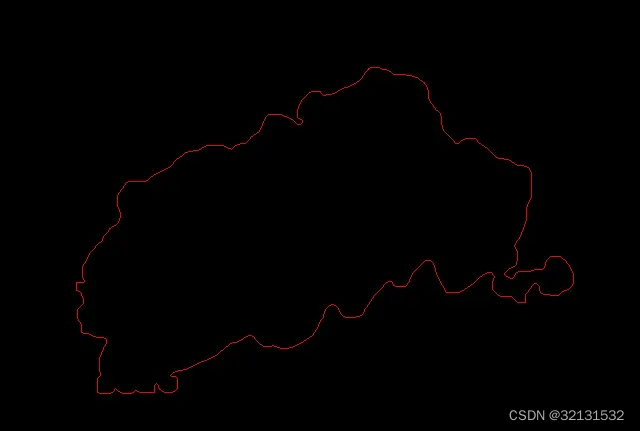
- 进行轮廓查找
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
using namespace cv;
using namespace std;
Mat src, dst, gray_src;
char input_image[] = "input image";
char output_image[] = "output image";
int main(int argc, char ** argv){
src = imread("case6.jpg");
if (src.empty()){
printf("colud not load image ..\n");
return -1;
}
namedWindow(input_image, CV_WINDOW_AUTOSIZE);
namedWindow(output_image, CV_WINDOW_AUTOSIZE);
imshow(input_image, src);
// 均值降噪
Mat blurImg;
GaussianBlur(src, blurImg, Size(15, 15), 0, 0);
imshow("input image", src);
// 二值化
Mat binary;
cvtColor(blurImg, gray_src, COLOR_BGR2GRAY);
threshold(gray_src, binary, 0, 255, THRESH_BINARY | THRESH_TRIANGLE);
imshow("binary", binary);
// 闭操作进行联通物体内部
Mat morphImage;
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(binary, morphImage, MORPH_CLOSE, kernel, Point(-1, -1), 2);
imshow("morphology", morphImage);
// 获取最大轮廓
vector<vector<Point>> contours;
vector<Vec4i> hireachy;
findContours(morphImage, contours, hireachy, CV_RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point());
Mat connImage = Mat::zeros(src.size(), CV_8UC3);
for (size_t t = 0; t < contours.size(); t++){
Rect rect = boundingRect(contours[t]);
if (rect.width < src.cols / 2) continue;
if (rect.width > src.cols - 20) continue;
double area = contourArea(contours[t]);
double len = arcLength(contours[t], true);
drawContours(connImage, contours, t, Scalar(0, 0, 255), 1, 8, hireachy);
printf("area of star could : %f \n", area);
printf("lenght of star could : %f \n", len);
}
imshow(output_image, connImage);
waitKey(0);
return 0;
}二值化
形态学操作
最终的轮廓
?
文章来源:https://blog.csdn.net/lvwenshuai/article/details/135203665
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 这就是我们为个人或企业搭建的独立知识付费平台,让我们看看它都有哪些功能
- 20240114-寻找零损失或一损失的玩家
- 基于共享储能电站的工业用户日前优化经济调度【复现】
- 服务器运维小技巧(一)——如何进行远程协助
- 内网穿透的应用-如何在群辉7.2中使用Docker安装并远程访问本地网心云容器魔方管理界面
- 探索SQL性能优化之道:实用技巧与最佳实践
- 【开题报告】基于SpringBoot的地方特色推荐系统的设计与实现
- 利用注解和反射处理方法级别的逻辑
- Centos7 两种方式安装 MySQL5.7 步骤 yum 、本地 tar 文件
- 如何使用Java支付宝沙箱环境并公网调用sdk创建支付单服