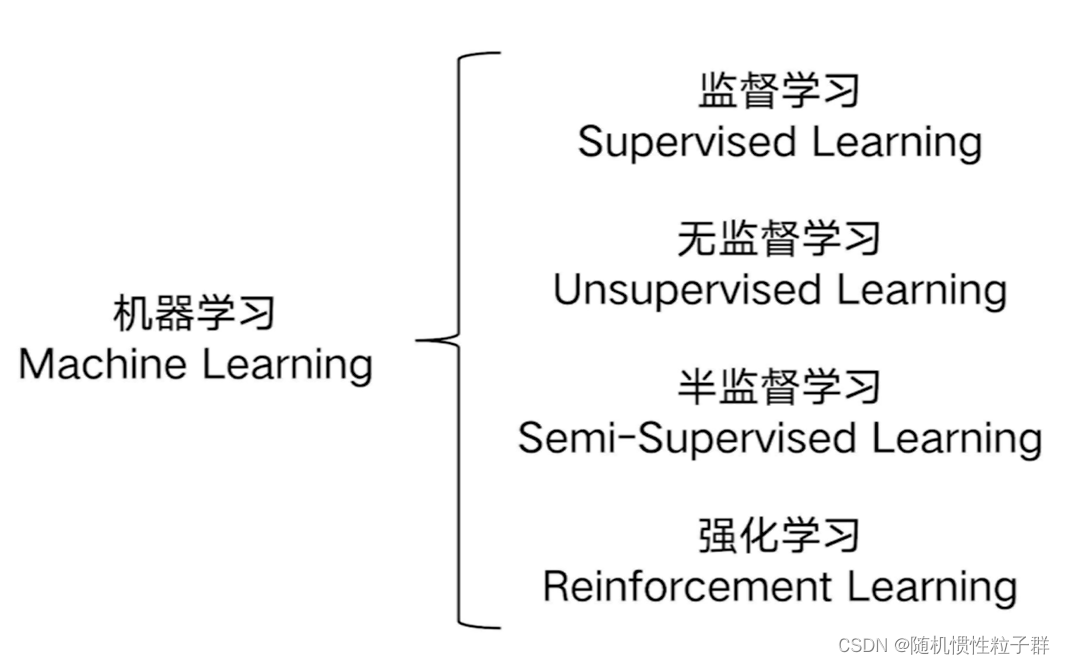
强化学习:MuJoCo机器人强化学习仿真入门

?
?声明:我们跳过mujoco环境的搭建,搭建环境不难,可自行百度
下面开始进入正题(需要有一定的python基础与xml基础):

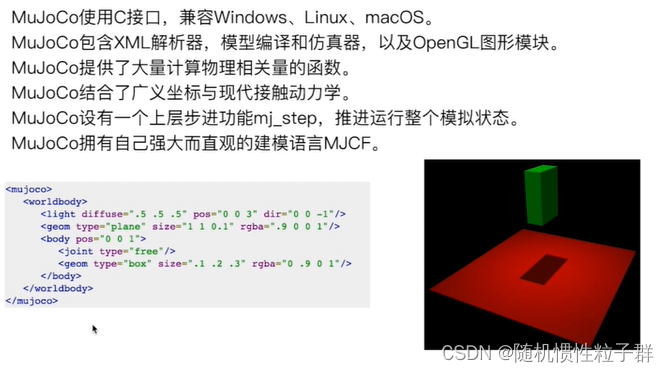
?下面进入到建立机器人模型的部分:
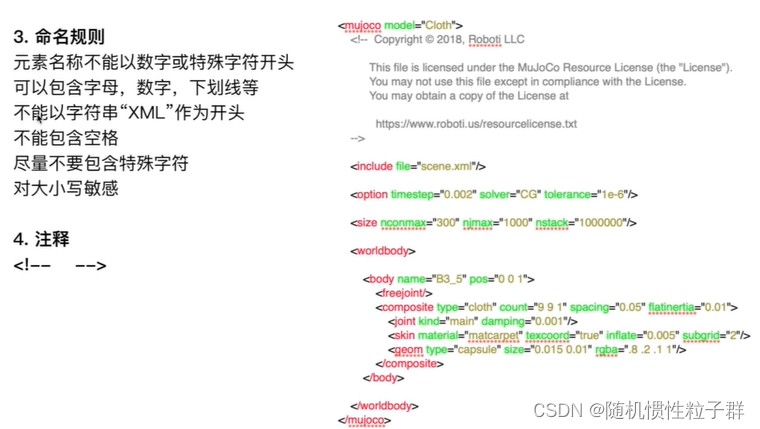
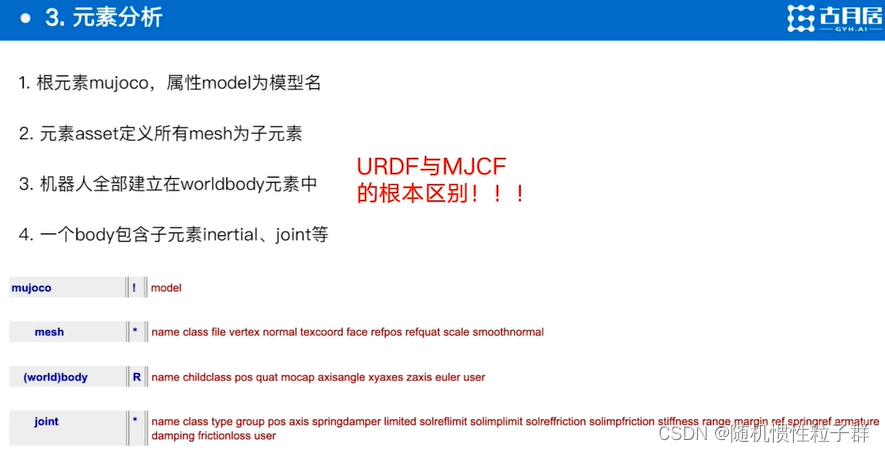
需要先介绍URDF模型文件和导出MJCF格式





?介绍完毕,下面开始进行mujoco仿真:
首先将这4个文件复制到.mujoco/mujoco210/bin文件夹中:
?接着讲ur5的模型stl文件放置在.mujoco/mujoco210文件夹中:
进入bin文件夹中开启一个终端输入:
./simulate ur5.xml

出现机械臂的模型可视化,下面讨论该如何进行控制:
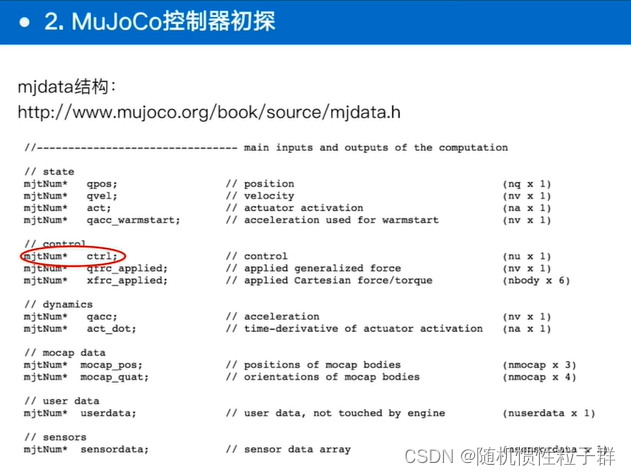
开始介绍控制器接口:


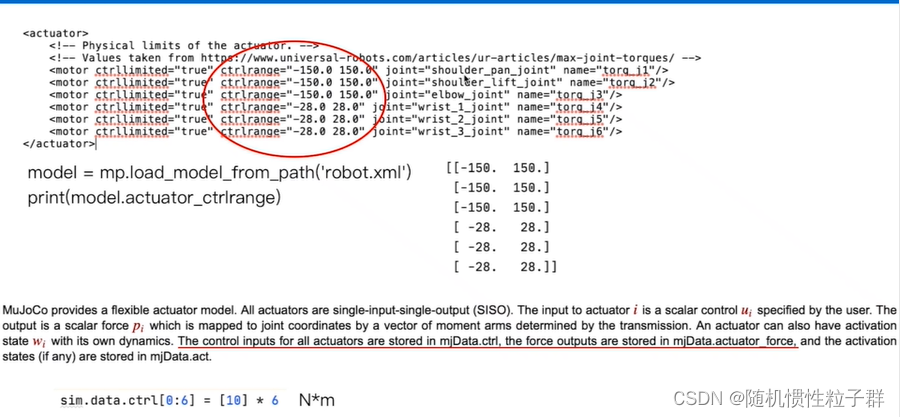
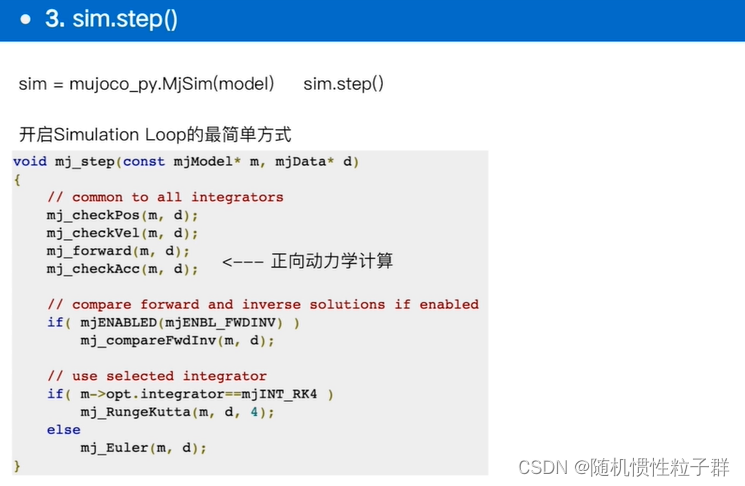

下面利用mujoco.py接口导入模型,并尝试施加控制器输入:

?在运行main.py文件时,出现了一个报错,下面解决这个问题:
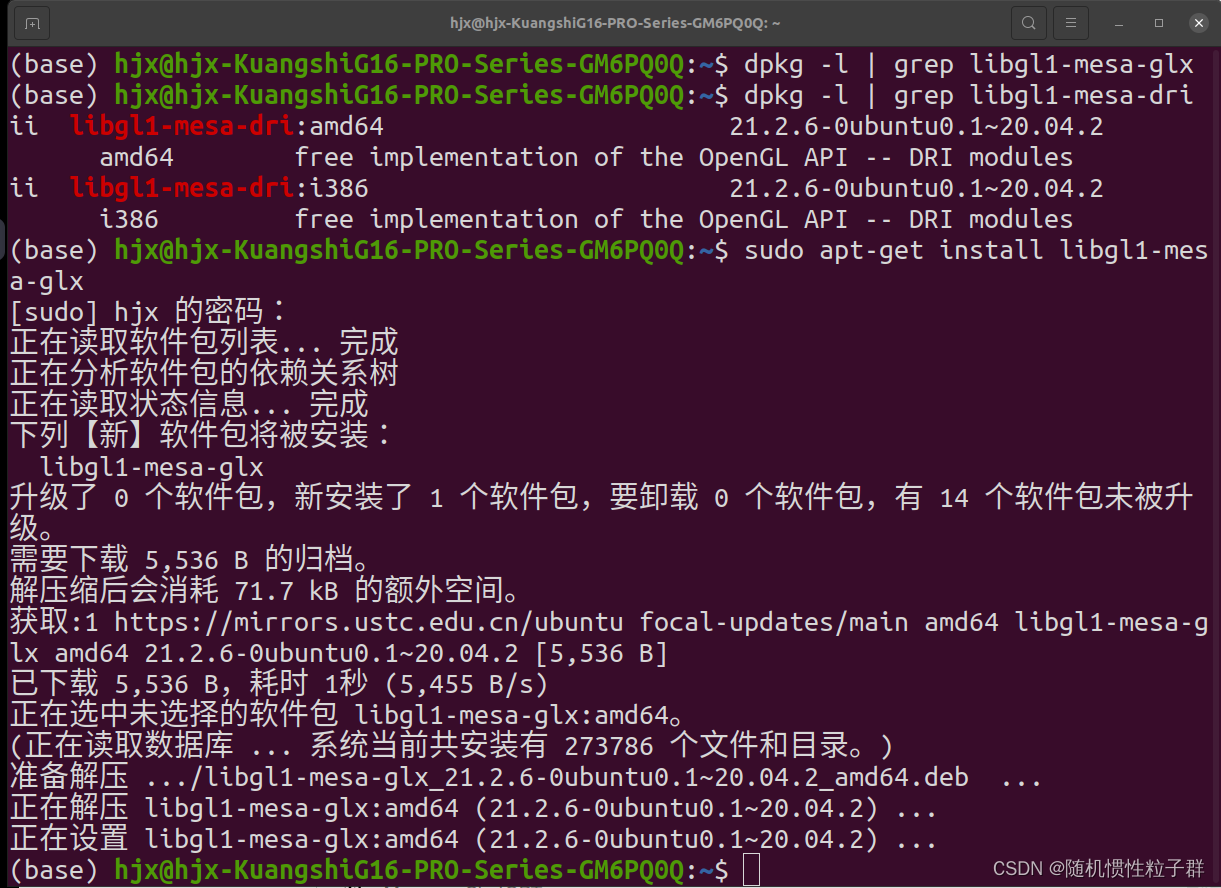
????????检查您的系统是否安装了OpenGL库,例如 libgl1-mesa-glx 和 libgl1-mesa-dri(对于linux的系统)。
-
打开终端: 在您的 Linux 系统上打开一个终端窗口。
-
检查
libgl1-mesa-glx库: 使用以下命令来检查libgl1-mesa-glx库是否已安装:
dpkg -l | grep libgl1-mesa-glx
如果这个库已安装,您将看到列表中的条目和版本信息。如果没有列出,则表示这个库尚未安装。
- 检查
libgl1-mesa-dri库: 使用以下命令来检查libgl1-mesa-dri库是否已安装:
dpkg -l | grep libgl1-mesa-dri
同样,如果已安装,您将在列表中看到相关信息。
如果您发现这些库未安装,您可以使用以下命令来安装它们:
sudo apt-get update
sudo apt-get install libgl1-mesa-glx libgl1-mesa-dri
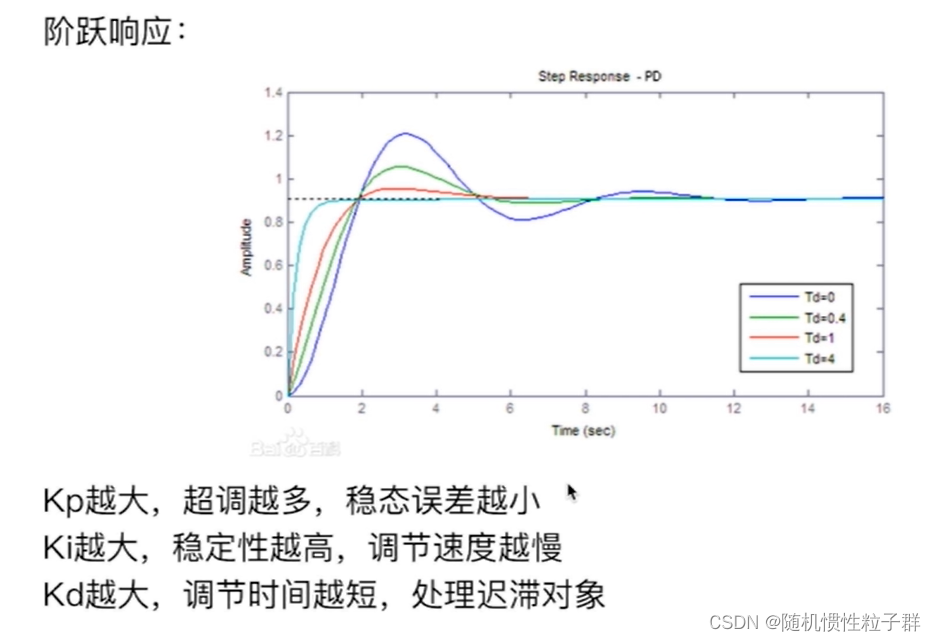
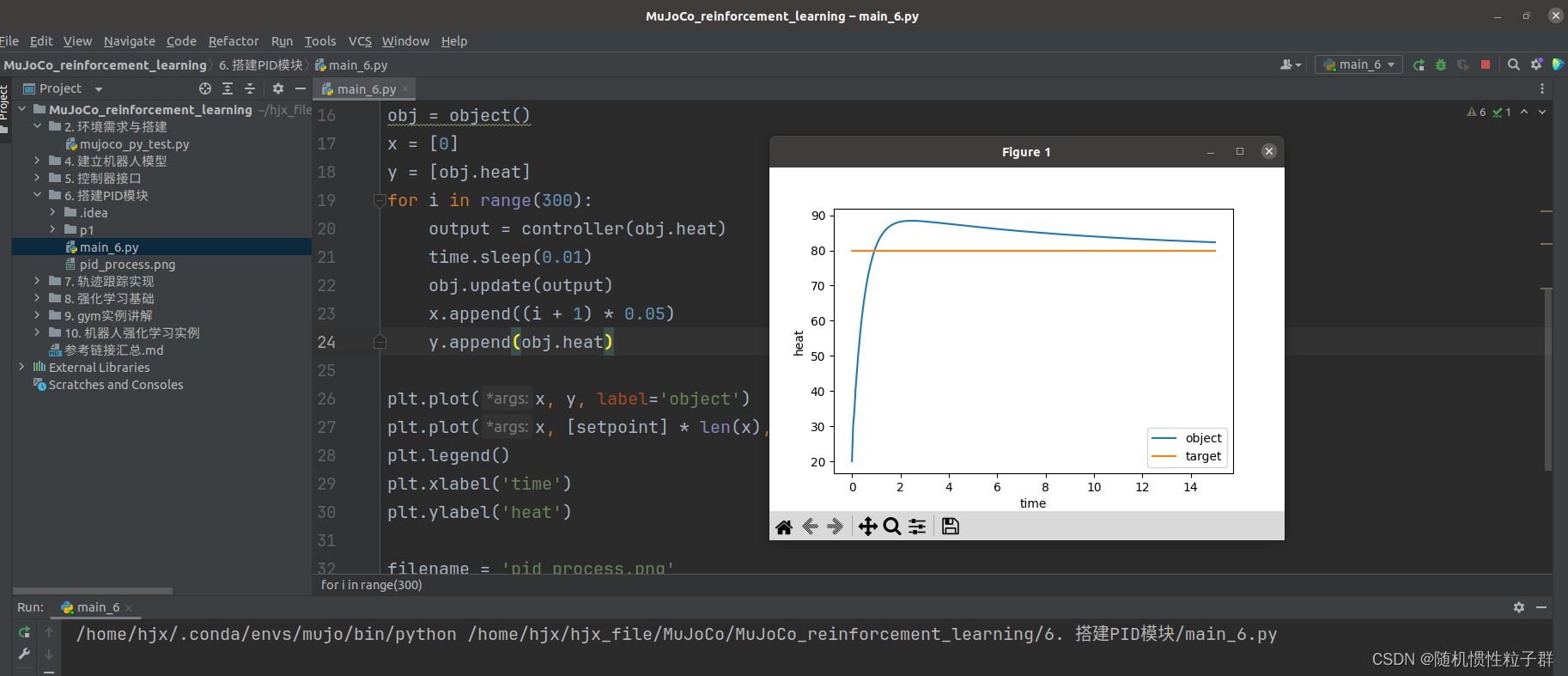
继续下一个环节,搭建PID模块:
下面以一个简单的示例来展示:
接下来进行轨迹跟踪的实现:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 方法调用(java)
- 揭秘大型医院配电能耗监管平台安装的必要性
- 阿里云IP地址段
- 重温《深入理解Java虚拟机:JVM高级特性与最佳实践(第二版)》 –– 学习笔记(一)
- 浙大恩特客户资源管理系统 CrmBasicAction.entcrm任意文件上传
- 面试官:宕机了,Redis 如何避免数据丢失?
- 一个简单的KNN实现方法
- ROS发布消息与接受消息的机制
- 最小花费-银行转账-图的最短路-超详细解析注释
- 无参数RCE知识点