工程(十七)——自己数据集跑R2live
发布时间:2023年12月30日
博主创建了一个科研互助群Q:772356582,欢迎大家加入讨论。
r2live是比较早的算法,编译过程有很多问题,通过以下两个博客可以解决
r2live process has died 问题解决了_required process [r3live_mapping-3] has died!-CSDN博客
我这里给出修改过的代码地址
一、基础环境
- Ubuntu20.04
- ROS noetic
- Ceres Solver
- livox_ros_driver?
二、编译
cd ~/catkin_ws/src
git clone https://github.com/hku-mars/r2live.git
git clone https://github.com/Livox-SDK/livox_ros_driver.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash三、运行
roslaunch r2live demo.launch
rosbag play YOUR_DOWNLOADED.bag
四、运行自己数据集
关于固态激光雷达和相机的数据集如何建立见之前跑r3live的博客
工程(十三)——从零用自己数据跑R3LIVE_r3live跑自己的数据-CSDN博客
?下面只讲改哪些部分
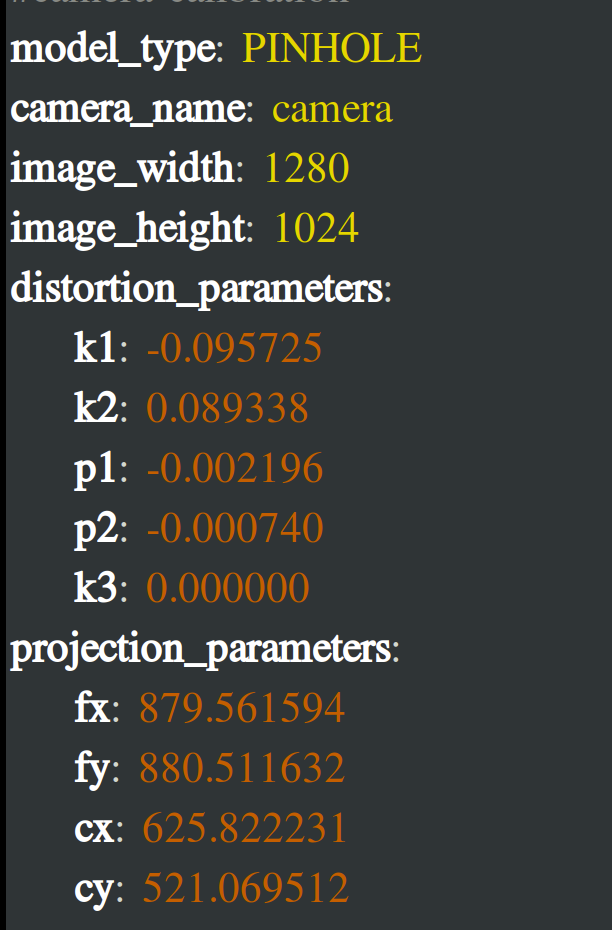
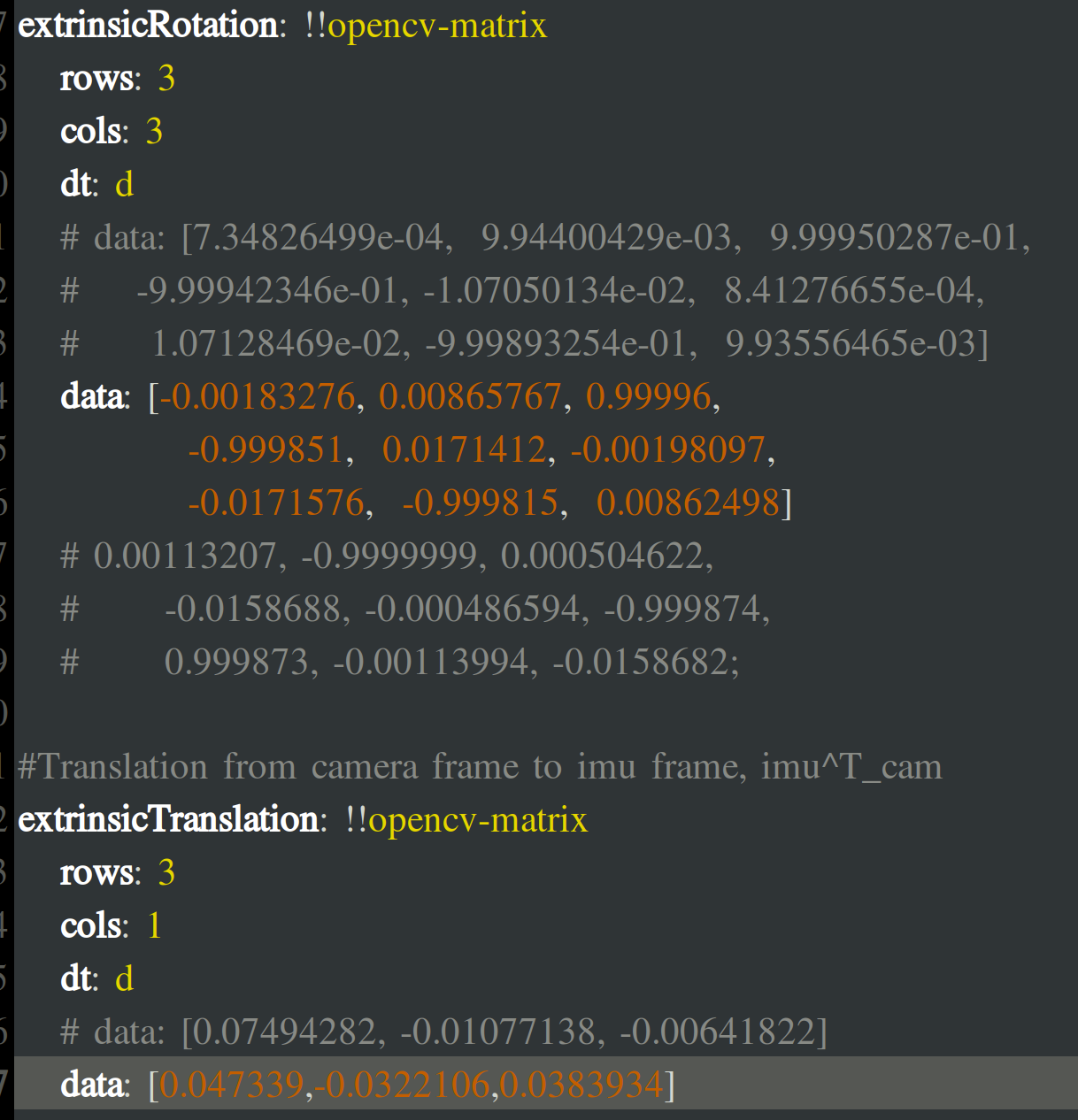
1.r2live/src/r2live/config/filr_cam.yaml
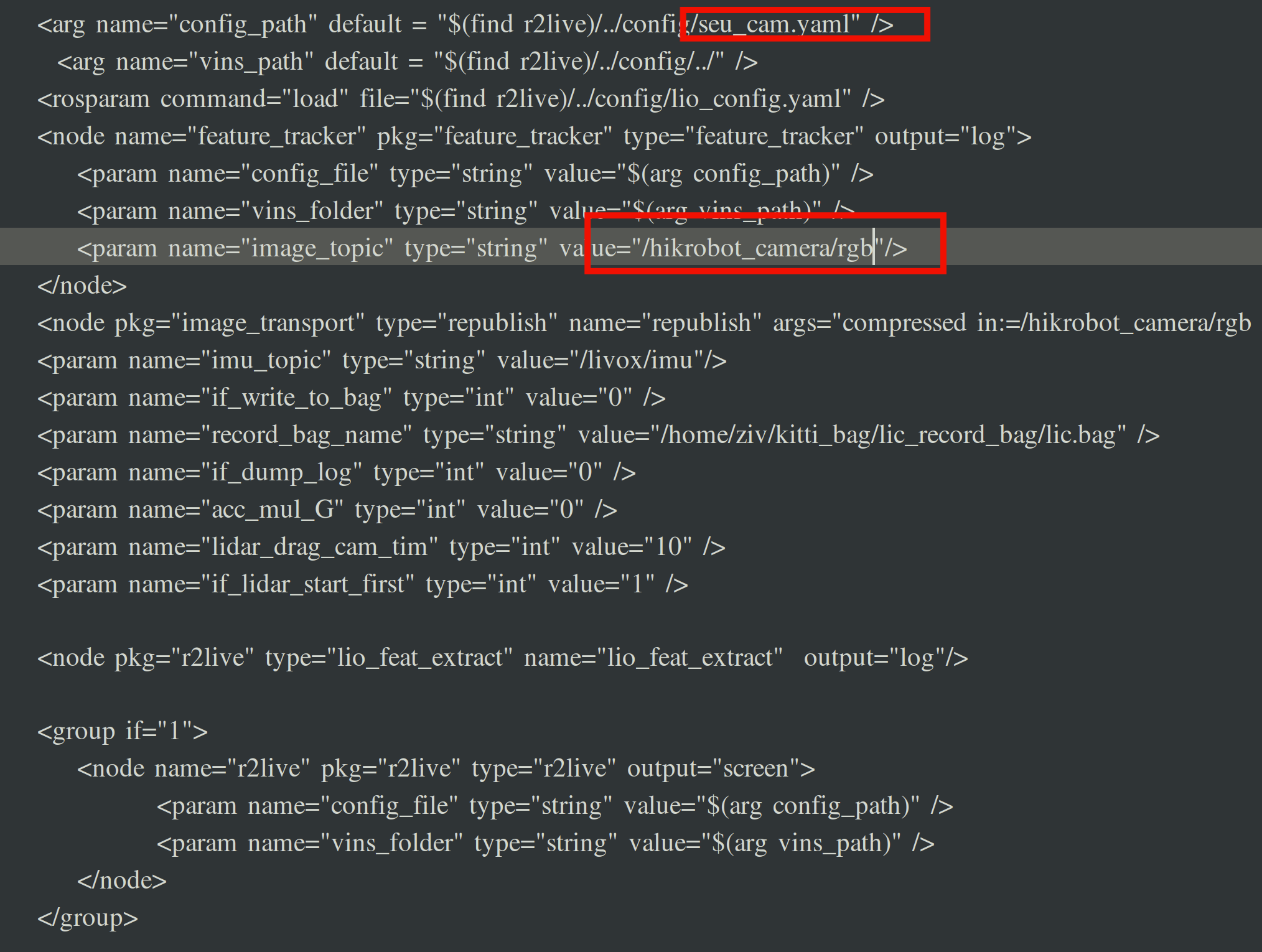
2.r2live/src/r2live/r2live/launch/seu.launch
文章来源:https://blog.csdn.net/HUASHUDEYANJING/article/details/135300438
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- linux下超级程序!在linux界面实现类图像化界面的操作体验!
- Java打成压缩包的方法汇总
- C++入门【18-C++ 指针】
- 罗德与施瓦茨FSV40-N手持式频谱分析仪
- sm2和aes加解密
- 【JVM】9.自动垃圾回收(垃圾回收器)
- wps如何把文字设置编号为二级1.1?
- 深入理解C语言(2):字符、字符串与内存函数
- 2024年金科《数字媒体技术》专业参考书目及考试大纲
- ssm基于HTML和JS物资物流系统的设计与实现+vue论文