UART协议——FPGA代码篇
发布时间:2023年12月18日
一.串口(UART)协议简介
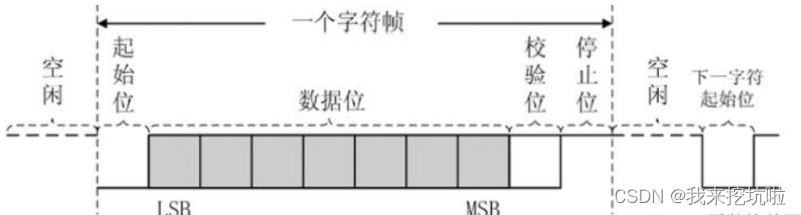
????????UART 串口通信有几个重要的参数,分别是波特率、起始位、数据位、停止位和奇偶检验位,对于两个使用UART 串口通信的端口,这些参数必须匹配,否则通

-
起始位:表示数据传输的开始,电平逻辑为“0” 。
-
数据位:可能值有5、6、7、8、9,表示传输这几个bit 位数据。一般取值为8,因为一个ASCII 字符值为8 位。
-
奇偶校验位:用于接收方对接收到的数据进行校验,校验“1” 的位数为偶数(偶校验) 或奇数(奇校验),以此来校验数据传送的正确性,使用时不需要此位也可以。
-
停止位:表示一帧数据的结束。电平逻辑为“1”。
-
波特率:串口通信时的速率,它用单位时间内传输的二进制代码的有效位(bit) 数来表示,其单位为每秒比特数bit/s(bps)。常见的波特率值有4800、9600、14400、38400、115200 等,数值越大数据传输的越快,波特率为115200 表示每秒钟传输115200 位数据。
 ?
?
二.串口发送端设计?
? (1)流程设计?
?????????当使能信号有效后拉高发送标志信号,标志模块进入发送过程;当发送完10个bit后,拉低发送标志信号,标志发送过程结束。使能信号有效时将要发送的数据寄存。
? (2)verilog代码
// ** 功能 : 1、基于FPGA的串口发送驱动模块;
// 2、可设置波特率BPS、主时钟CLK_FRE;
// 3、起始位1bit,数据位8bit,停止位1bit,无奇偶校验;
// 4、每发送1个字节后拉高uart_tx_done一个周期,可用于后续发送多字节模块。
// *******************************************************************************************************
module uart_tx
#(
parameter integer BPS = 9_600 , //发送波特率
parameter integer CLK_FRE = 50_000_000 //主时钟频率
)
(
//系统接口
input sys_clk , //系统时钟
input sys_rst_n , //系统复位,低电平有效
//用户接口
input [7:0] uart_tx_data , //需要通过UART发送的数据,在uart_tx_en为高电平时有效
input uart_tx_en , //发送有效,当其为高电平时,代表此时需要发送的数据有效
//UART发送
output reg uart_tx_done , //成功发送1BYTE数据后拉高一个周期
output reg uart_txd //UART发送数据线tx
);
//当发送使能信号到达时,寄存待发送的数据以免后续变化、丢失
always @(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)
uart_tx_data_reg <=8'd0;
else if(uart_tx_en) //要发送有效的数据
uart_tx_data_reg <= uart_tx_data; //寄存需要发送的数据
else
uart_tx_data_reg <= uart_tx_data_reg;
end
//当发送使能信号到达时,进入发送过程
always @(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)
tx_state <=1'b0;
else if(uart_tx_en)
tx_state <= 1'b1; //发送信号有效则进入发送过程
//发送完了最后一个数据则退出发送过程
else if((bit_cnt == BITS_NUM - 1'b1) && (clk_cnt == BPS_CNT - 1'b1))
tx_state <= 1'b0;
else
tx_state <= tx_state;
end
//发送数据完毕后拉高发送完毕信号一个周期,指示一个字节发送完毕
always @(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)
uart_tx_done <=1'b0;
//发送数据完毕后拉高发送完毕信号一个周期
else if((bit_cnt == BITS_NUM - 1'b1) && (clk_cnt == BPS_CNT - 1'b1))
uart_tx_done <=1'b1;
else
uart_tx_done <=1'b0;
end
//进入发送过程后,启动时钟计数器与发送个数bit计数器
always @(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)begin
clk_cnt <= 32'd0;
bit_cnt <= 4'd0;
end
else if(tx_state) begin //在发送状态
if(clk_cnt < BPS_CNT - 1'd1)begin //一个bit数据没有发送完
clk_cnt <= clk_cnt + 1'b1; //时钟计数器+1
bit_cnt <= bit_cnt; //bit计数器不变
end
else begin //一个bit数据发送完了
clk_cnt <= 32'd0; //清空时钟计数器,重新开始计时
bit_cnt <= bit_cnt+1'b1; //bit计数器+1,表示发送完了一个bit的数据
end
end
else begin //不在发送状态
clk_cnt <= 32'd0; //清零
bit_cnt <= 4'd0; //清零
end
end
endmodule? ?(3)前仿真代码
`timescale 1ns/1ns //定义时间刻度
module tb_uart_tx();
reg sys_clk ;
reg sys_rst_n ;
reg [7:0] uart_tx_data ;
reg uart_tx_en ;
wire uart_txd ;
parameter integer BPS = 'd230400 ; //波特率
parameter integer CLK_FRE = 'd50_000_000 ; //系统频率50M
localparam integer BIT_TIME = 'd1000_000_000 / BPS ; //计算出传输每个bit所需要的时间
initial begin
sys_clk <=1'b0;
sys_rst_n <=1'b0;
uart_tx_en <=1'b0;
uart_tx_data <=8'd0;
#80 //系统开始工作
sys_rst_n <=1'b1;
#200
@(posedge sys_clk);
uart_tx_en <=1'b1;
uart_tx_data <= ({$random} % 256); //发送8位随机数据
#20
uart_tx_en <=1'b0;
#(BIT_TIME * 10) //发送1个BYTE需要10个bit
#200 $finish; //结束仿真
end
always #10 sys_clk=~sys_clk; //定义主时钟,周期20ns,频率50M
//例化发送驱动模块
uart_tx #(
.BPS (BPS ),
.CLK_FRE (CLK_FRE )
)
uart_tx_inst(
.sys_clk (sys_clk ),
.sys_rst_n (sys_rst_n ),
.uart_tx_data (uart_tx_data ),
.uart_tx_en (uart_tx_en ),
.uart_tx_done (uart_tx_done ),
.uart_txd (uart_txd )
);
endmodule? ?(3)结果
???????? ?
?
三.接收端设计
? (1)流程设计?
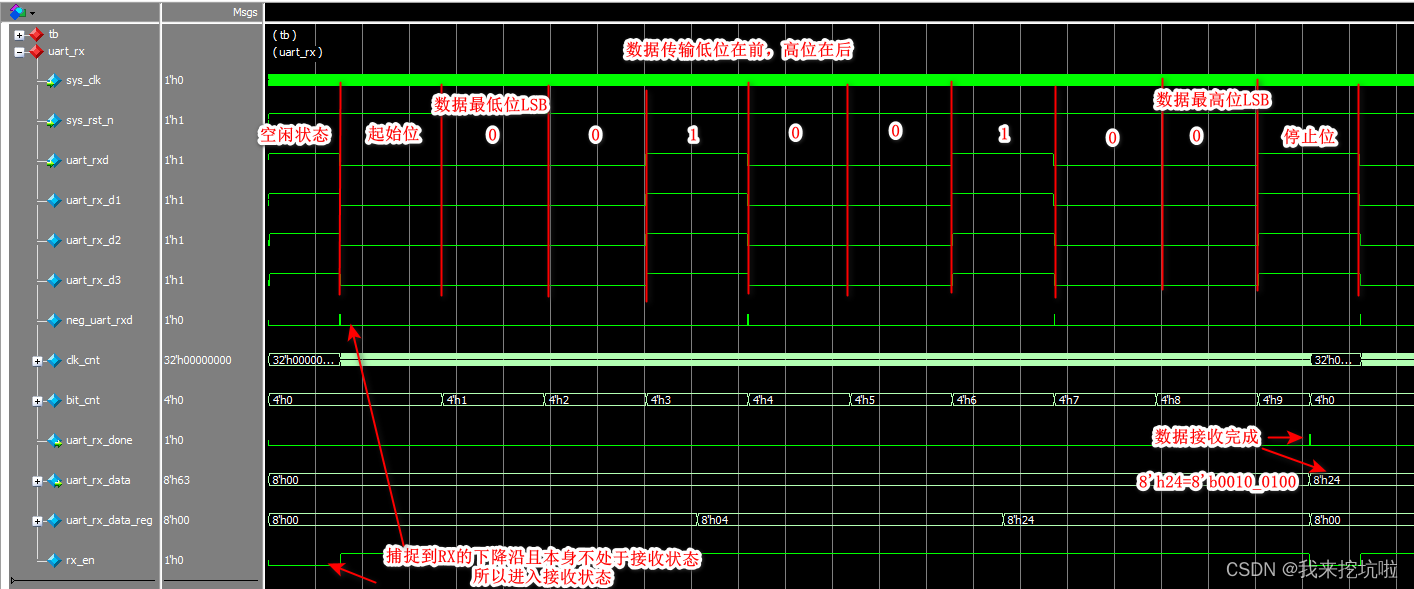
????????串口的传输是以起始位开始的,而起始位是将数据线拉低 ,所以我们需要捕捉数据线的下降沿,将接收数据线打拍3次,捕捉其下降沿。当捕捉到接收数据线的下降沿,拉高接收标志信号,标志模块进入接收过程;当接收完10个bit后,拉低接收标志信号,标志接收过程结束。
? (2)verilog代码
module uart_rx
#(
parameter integer BPS = 9_600 , //发送波特率
parameter integer CLK_FRE = 50_000_000 //输入时钟频率
)
(
//系统接口
input sys_clk , //50M系统时钟
input sys_rst_n , //系统复位
//UART接收线
input uart_rxd , //接收数据线
//用户接口
output reg uart_rx_done , //数据接收完成标志,当其为高电平时,代表接收数据有效
output reg [7:0] uart_rx_data //接收到的数据,在uart_rx_done为高电平时有效
);
assign neg_uart_rxd = uart_rx_d3 & (~uart_rx_d2); //捕获数据线的下降沿,用来标志数据传输开始
//将数据线打3拍,作用1:同步不同时钟域信号,防止亚稳态;作用2:捕获下降沿
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)begin
uart_rx_d1 <= 1'b0;
uart_rx_d2 <= 1'b0;
uart_rx_d3 <= 1'b0;
end
else begin
uart_rx_d1 <= uart_rxd;
uart_rx_d2 <= uart_rx_d1;
uart_rx_d3 <= uart_rx_d2;
end
end
//捕获到数据下降沿(起始位0)后,拉高传输开始标志位,并在第9个数据(终止位)的传输过程正中(数据比较稳定)再将传输开始标志位拉低,标志传输结束
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)
rx_en <= 1'b0;
else begin
if(neg_uart_rxd )
rx_en <= 1'b1;
//接收完第9个数据(终止位)将传输开始标志位拉低,标志传输结束,判断高电平
else if((bit_cnt == 4'd9) && (clk_cnt == BPS_CNT >> 1'b1) && (uart_rx_d3 == 1'b1) )
rx_en <= 1'b0;
else
rx_en <= rx_en;
end
end
//当数据传输到终止位时,拉高传输完成标志位,并将数据输出
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)begin
uart_rx_done <= 1'b0;
uart_rx_data <= 8'd0;
end
//结束接收后,将接收到的数据输出
else if((bit_cnt == 4'd9) && (clk_cnt == BPS_CNT >> 1'd1) && (uart_rx_d3 == 1'b1))begin
uart_rx_done <= 1'b1; //仅仅拉高一个时钟周期
uart_rx_data <= uart_rx_data_reg;
end
else begin
uart_rx_done <= 1'b0; //仅仅拉高一个时钟周期
uart_rx_data <= uart_rx_data;
end
end
//时钟每计数一个BPS_CNT(传输一位数据所需要的时钟个数),即将数据计数器加1,并清零时钟计数器
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)begin
bit_cnt <= 4'd0;
clk_cnt <= 32'd0;
end
else if(rx_en)begin //在接收状态
if(clk_cnt < BPS_CNT - 1'b1)begin //一个bit数据没有接收完
clk_cnt <= clk_cnt + 1'b1; //时钟计数器+1
bit_cnt <= bit_cnt; //bit计数器不变
end
else begin //一个bit数据接收完了
clk_cnt <= 32'd0; //清空时钟计数器,重新开始计时
bit_cnt <= bit_cnt + 1'b1; //bit计数器+1,表示接收完了一个bit的数据
end
end
else begin //不在接收状态
bit_cnt <= 4'd0; //清零
clk_cnt <= 32'd0; //清零
end
end
endmodule? ?(3)前仿真代码
// ** 功能 : 1、对基于FPGA的串口接收驱动模块的测试testbench
// 2、通过构建一个task来模拟上位机时序发送数据给串口接收驱动,观察该模块能否成功接收数据。
// 3、依次发送4个随机的8bit数据
// *******************************************************************************************************
`timescale 1ns/1ns //定义时间刻度
//模块、接口定义
module tb_uart_rx();
reg sys_clk ;
reg sys_rst_n ;
reg uart_rxd ;
wire uart_rx_done ;
wire [7:0] uart_rx_data ;
localparam integer BPS = 'd230400 ; //波特率
localparam integer CLK_FRE = 'd50_000_000 ; //系统频率50M
localparam integer CNT = 1000_000_000 / BPS ; //计算出传输每个bit所需要的时间,单位:ns
//初始时刻定义
initial begin
$timeformat(-9, 0, " ns", 10); //定义时间显示格式
sys_clk =1'b0;
sys_rst_n <=1'b0;
uart_rxd <=1'b1;
#20 //系统开始工作
sys_rst_n <=1'b1;
#3000
rx_byte({$random} % 256); //生成8位随机数1
rx_byte({$random} % 256); //生成8位随机数2
rx_byte({$random} % 256); //生成8位随机数3
rx_byte({$random} % 256); //生成8位随机数4
#60 $finish();
end
//每当成功接收一个BYTE的数据,就在测试端窗口打印出来
always @(posedge sys_clk)begin
if(uart_rx_done)begin
$display("@time%t", $time);
$display("rx : 0x%h",uart_rx_data);
end
end
//定义任务,每次发送的数据10 位(起始位1+数据位8+停止位1)
task rx_byte(
input [7:0] data
);
integer i; //定义一个常量
//用 for 循环产生一帧数据,for 括号中最后执行的内容只能写 i=i+1
for(i=0; i<10; i=i+1) begin
case(i)
0: uart_rxd <= 1'b0; //起始位
1: uart_rxd <= data[0]; //LSB
2: uart_rxd <= data[1];
3: uart_rxd <= data[2];
4: uart_rxd <= data[3];
5: uart_rxd <= data[4];
6: uart_rxd <= data[5];
7: uart_rxd <= data[6];
8: uart_rxd <= data[7]; //MSB
9: uart_rxd <= 1'b1; //停止位
endcase
#CNT; //每发送 1 位数据延时
end
endtask //任务结束
//设置主时钟
always #10 sys_clk <= ~sys_clk; //时钟20ns,50M
//例化被测试的串口接收驱动
uart_rx
#(
.BPS (BPS ),
.CLK_FRE (CLK_FRE )
)
uart_rx_inst(
.sys_clk (sys_clk ),
.sys_rst_n (sys_rst_n ),
.uart_rxd (uart_rxd ),
.uart_rx_done (uart_rx_done ),
.uart_rx_data (uart_rx_data )
);
endmodule? (3)结果
 ?
?
?
文章来源:https://blog.csdn.net/weixin_66634995/article/details/135070165
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【每日一题】—— A. Chemistry(900分思维)
- 【Linux】修复 Linux 错误 - 功能未实现
- 计算机网络期末复习
- stm32h7内部flash与qspi flash异同与差异
- 正则表达式
- Mysql InnoDB行锁深入理解
- 12.31信号位宽转换(整数,非整数),时钟分频(奇数,偶数,任意小数,占空比),自动售货机(1,2),游戏机
- 逛商场。。。
- 大数据引爆点:数据可视化的飞速发展
- C语言--给定一个数组,其中有一个数字出现的次数超过总数的一半,请找出该数字