均方差损失推导
一、损失函数(Cost function)
定义:用于衡量模型预测结果与真实结果之间差距的函数。(有的地方称之为代价函数,但是个人感觉损失函数这个名称更贴近实际用途)
理解:(以均方差损失函数为例)
????????对于一个线性回归模型f(x)=wx+b,其损失函数为.
其中,表示预测值与真实值之间的差(即线上的点与真实点之间的距离),
我们得到J(w,b)的值越小,则预测函数越接近真实值。(计算的是y轴方向上的损失)
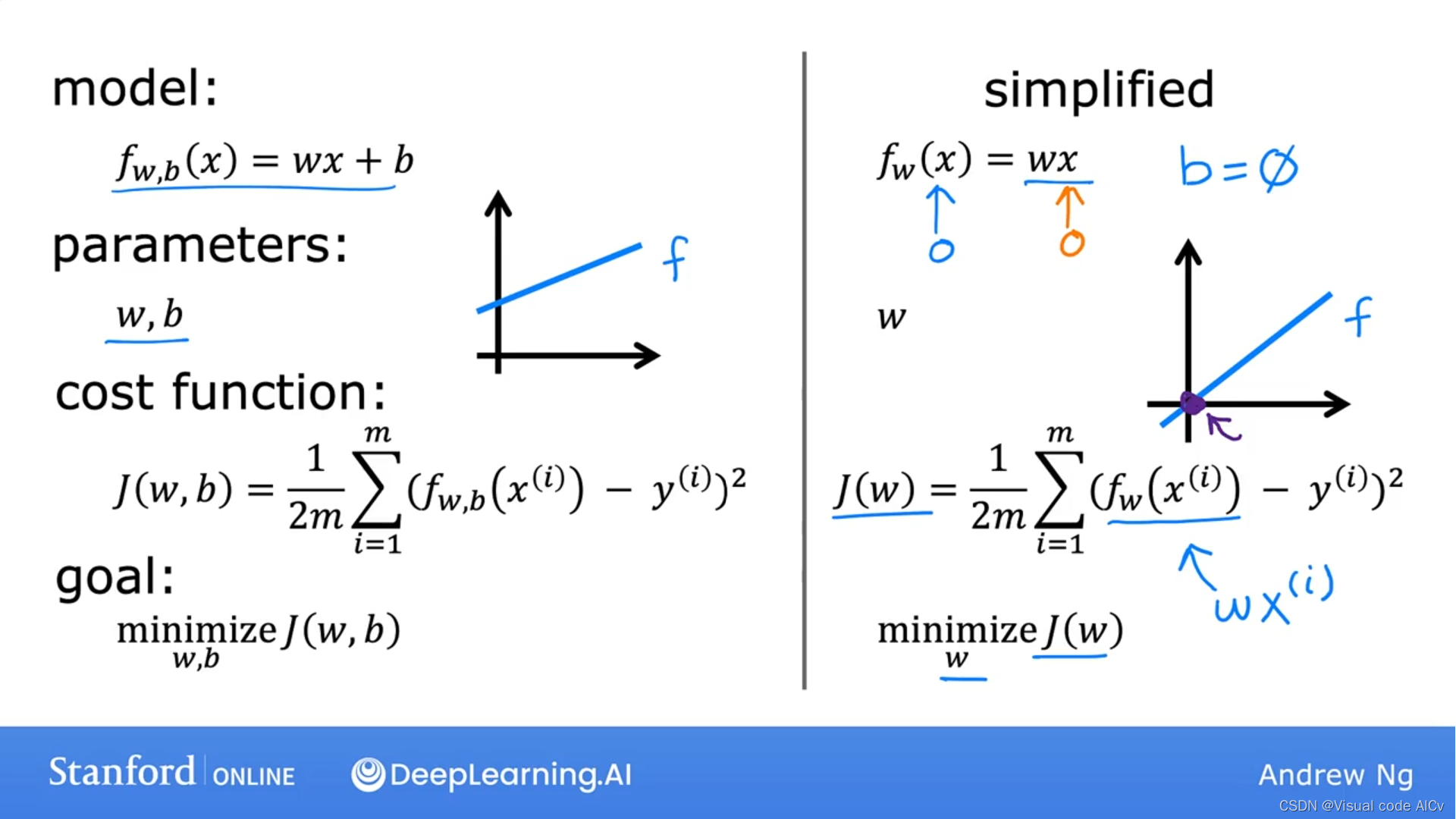
?为什么均方差公式需要乘以1/2:为了方便在求导时进行计算。且乘以1/2并不会改变模型优化结果。
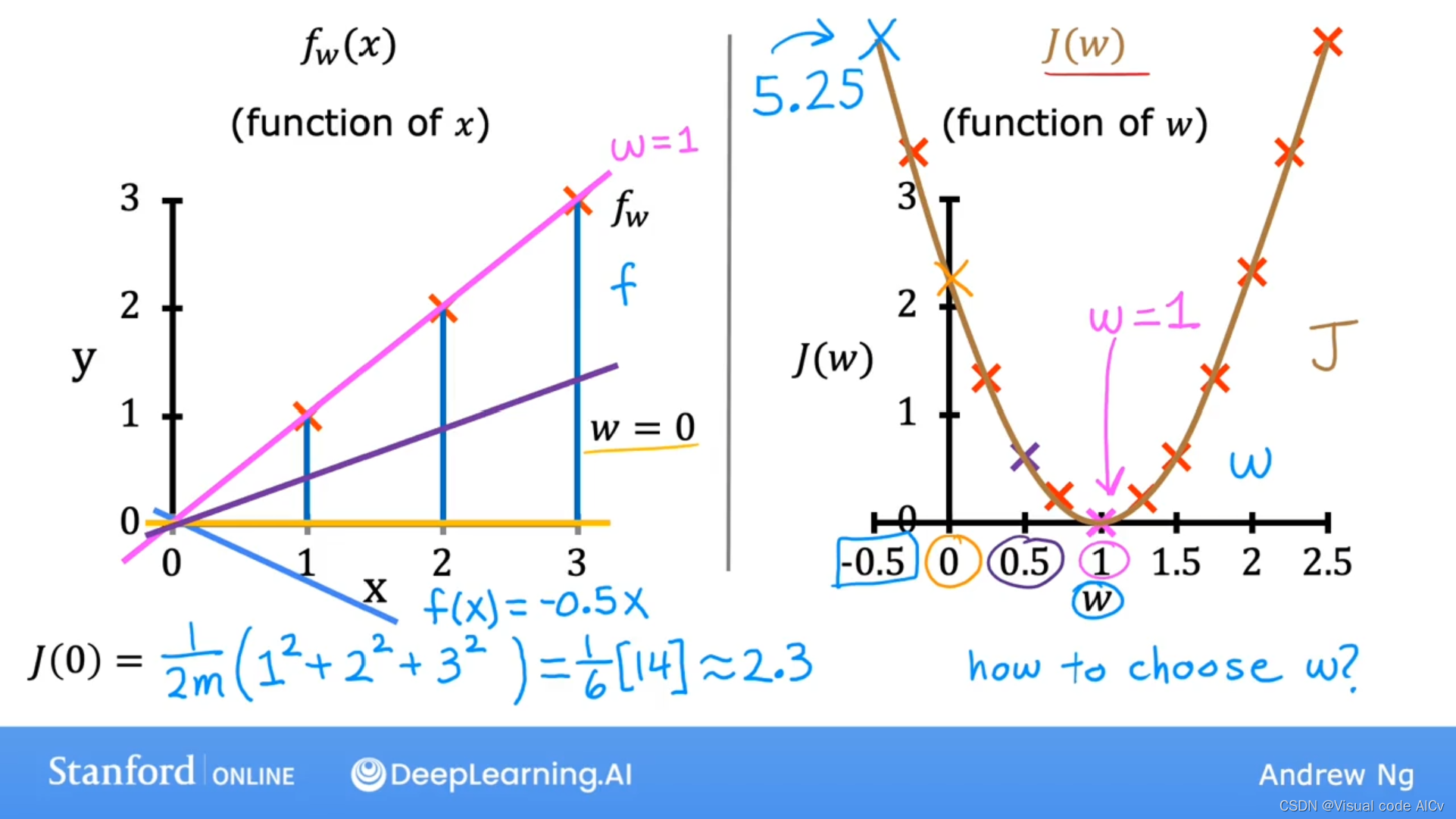
示例:
下图基于线性模型:
左图为w取不同值时对应的变化。
右图为w取不同值时对应的变化情况。
可知当w等于1时,最小;故取w=1时,模型最优
?常用损失函数:
-
均方误差(Mean Squared Error,MSE):均方误差是最常见的损失函数之一,用于回归问题。它计算预测值与真实值之间的平方差的平均值。
-
交叉熵损失函数(Cross-Entropy Loss):交叉熵损失函数常用于分类问题中,特别是在多类别分类问题中。它计算预测值和真实值之间的交叉熵,可以更好地反映模型对于不同类别的预测性能。
-
Hinge损失函数:Hinge损失函数通常用于支持向量机(SVM)中,用于最大化分类边界的间隔。
-
对数损失函数(Log Loss):对数损失函数也常用于分类问题中,特别是二分类问题。它衡量预测值和真实值之间的对数差异,可以用于评估模型的分类性能。
二、均方差损失函数推导
首先,定义线性回归模型为:
均方差损失函数的定义为:
其中,n表示样本数量,y?表示真实标签,\hat{y}_i表示模型对第i个样本的预测值。
现在,我们将均方差损失函数展开:
我们的目标是最小化MSE,即找到使MSE最小的θ?和θ?。为了实现这一目标,我们可以使用梯度下降等优化算法,通过对θ?和θ?的偏导数进行迭代更新。
现在,我们对θ?和θ?分别求偏导数:
接下来,我们可以使用梯度下降算法来更新θ?和θ?:
其中,α表示学习率,控制每次迭代的步长。
通过不断迭代更新θ?和θ?,直到损失函数收敛或达到预定的迭代次数,我们可以找到最优的θ?和θ?,从而训练出一个最优的线性回归模型。
三、损失函数可视化实例(2D)
代码来自吴恩达机器学习课程附带的资源包(jupyter不太会用,所以重新写一个main)(运行前先下载数据集[上传失败了],还有样式)
main
import numpy as np
import matplotlib.widgets
import matplotlib.pyplot as plt
from lab_utils_uni import plt_intuition, plt_stationary, plt_update_onclick, soup_bowl
plt.style.use('./deeplearning.mplstyle')
x_train = np.array([1.0, 2.0]) # (size in 1000 square feet)
y_train = np.array([300.0, 500.0])
def compute_cost(x, y, w, b):
"""
Computes the cost function for linear regression.
Args:
x (ndarray (m,)): Data, m examples
y (ndarray (m,)): target values
w,b (scalar) : model parameters
Returns
total_cost (float): The cost of using w,b as the parameters for linear regression
to fit the data points in x and y
"""
# number of training examples
m = x.shape[0]
cost_sum = 0
for i in range(m):
f_wb = w * x[i] + b
cost = (f_wb - y[i]) ** 2
cost_sum = cost_sum + cost
total_cost = (1 / (2 * m)) * cost_sum
return total_cost
plt_intuition(x_train, y_train)
lab_utils_uni.py?
"""
lab_utils_uni.py
routines used in Course 1, Week2, labs1-3 dealing with single variables (univariate)
"""
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.ticker import MaxNLocator
from matplotlib.gridspec import GridSpec
from matplotlib.colors import LinearSegmentedColormap
from ipywidgets import interact
from lab_utils_common import compute_cost
from lab_utils_common import dlblue, dlorange, dldarkred, dlmagenta, dlpurple, dlcolors
plt.style.use('./deeplearning.mplstyle')
n_bin = 5
dlcm = LinearSegmentedColormap.from_list(
'dl_map', dlcolors, N=n_bin)
##########################################################
# Plotting Routines
##########################################################
def plt_house_x(X, y,f_wb=None, ax=None):
''' plot house with aXis '''
if not ax:
fig, ax = plt.subplots(1,1)
ax.scatter(X, y, marker='x', c='r', label="Actual Value")
ax.set_title("Housing Prices")
ax.set_ylabel('Price (in 1000s of dollars)')
ax.set_xlabel(f'Size (1000 sqft)')
if f_wb is not None:
ax.plot(X, f_wb, c=dlblue, label="Our Prediction")
ax.legend()
def mk_cost_lines(x,y,w,b, ax):
''' makes vertical cost lines'''
cstr = "cost = (1/m)*("
ctot = 0
label = 'cost for point'
addedbreak = False
for p in zip(x,y):
f_wb_p = w*p[0]+b
c_p = ((f_wb_p - p[1])**2)/2
c_p_txt = c_p
ax.vlines(p[0], p[1],f_wb_p, lw=3, color=dlpurple, ls='dotted', label=label)
label='' #just one
cxy = [p[0], p[1] + (f_wb_p-p[1])/2]
ax.annotate(f'{c_p_txt:0.0f}', xy=cxy, xycoords='data',color=dlpurple,
xytext=(5, 0), textcoords='offset points')
cstr += f"{c_p_txt:0.0f} +"
if len(cstr) > 38 and addedbreak is False:
cstr += "\n"
addedbreak = True
ctot += c_p
ctot = ctot/(len(x))
cstr = cstr[:-1] + f") = {ctot:0.0f}"
ax.text(0.15,0.02,cstr, transform=ax.transAxes, color=dlpurple)
##########
# Cost lab
##########
def plt_intuition(x_train, y_train):
w_range = np.array([200-200,200+200])
tmp_b = 100
w_array = np.arange(*w_range, 5)
cost = np.zeros_like(w_array)
for i in range(len(w_array)):
tmp_w = w_array[i]
cost[i] = compute_cost(x_train, y_train, tmp_w, tmp_b)
@interact(w=(*w_range,10),continuous_update=False)
def func( w=150):
f_wb = np.dot(x_train, w) + tmp_b
fig, ax = plt.subplots(1, 2, constrained_layout=True, figsize=(8,4))
fig.canvas.toolbar_position = 'bottom'
mk_cost_lines(x_train, y_train, w, tmp_b, ax[0])
plt_house_x(x_train, y_train, f_wb=f_wb, ax=ax[0])
ax[1].plot(w_array, cost)
cur_cost = compute_cost(x_train, y_train, w, tmp_b)
ax[1].scatter(w,cur_cost, s=100, color=dldarkred, zorder= 10, label= f"cost at w={w}")
ax[1].hlines(cur_cost, ax[1].get_xlim()[0],w, lw=4, color=dlpurple, ls='dotted')
ax[1].vlines(w, ax[1].get_ylim()[0],cur_cost, lw=4, color=dlpurple, ls='dotted')
ax[1].set_title("Cost vs. w, (b fixed at 100)")
ax[1].set_ylabel('Cost')
ax[1].set_xlabel('w')
ax[1].legend(loc='upper center')
fig.suptitle(f"Minimize Cost: Current Cost = {cur_cost:0.0f}", fontsize=12)
plt.show()
# this is the 2D cost curve with interactive slider
def plt_stationary(x_train, y_train):
# setup figure
fig = plt.figure( figsize=(9,8))
#fig = plt.figure(constrained_layout=True, figsize=(12,10))
fig.set_facecolor('#ffffff') #white
fig.canvas.toolbar_position = 'top'
#gs = GridSpec(2, 2, figure=fig, wspace = 0.01)
gs = GridSpec(2, 2, figure=fig)
ax0 = fig.add_subplot(gs[0, 0])
ax1 = fig.add_subplot(gs[0, 1])
ax2 = fig.add_subplot(gs[1, :], projection='3d')
ax = np.array([ax0,ax1,ax2])
#setup useful ranges and common linspaces
w_range = np.array([200-300.,200+300])
b_range = np.array([50-300., 50+300])
b_space = np.linspace(*b_range, 100)
w_space = np.linspace(*w_range, 100)
# get cost for w,b ranges for contour and 3D
tmp_b,tmp_w = np.meshgrid(b_space,w_space)
z=np.zeros_like(tmp_b)
for i in range(tmp_w.shape[0]):
for j in range(tmp_w.shape[1]):
z[i,j] = compute_cost(x_train, y_train, tmp_w[i][j], tmp_b[i][j] )
if z[i,j] == 0: z[i,j] = 1e-6
w0=200;b=-100 #initial point
### plot model w cost ###
f_wb = np.dot(x_train,w0) + b
mk_cost_lines(x_train,y_train,w0,b,ax[0])
plt_house_x(x_train, y_train, f_wb=f_wb, ax=ax[0])
### plot contour ###
CS = ax[1].contour(tmp_w, tmp_b, np.log(z),levels=12, linewidths=2, alpha=0.7,colors=dlcolors)
ax[1].set_title('Cost(w,b)')
ax[1].set_xlabel('w', fontsize=10)
ax[1].set_ylabel('b', fontsize=10)
ax[1].set_xlim(w_range) ; ax[1].set_ylim(b_range)
cscat = ax[1].scatter(w0,b, s=100, color=dlblue, zorder= 10, label="cost with \ncurrent w,b")
chline = ax[1].hlines(b, ax[1].get_xlim()[0],w0, lw=4, color=dlpurple, ls='dotted')
cvline = ax[1].vlines(w0, ax[1].get_ylim()[0],b, lw=4, color=dlpurple, ls='dotted')
ax[1].text(0.5,0.95,"Click to choose w,b", bbox=dict(facecolor='white', ec = 'black'), fontsize = 10,
transform=ax[1].transAxes, verticalalignment = 'center', horizontalalignment= 'center')
#Surface plot of the cost function J(w,b)
ax[2].plot_surface(tmp_w, tmp_b, z, cmap = dlcm, alpha=0.3, antialiased=True)
ax[2].plot_wireframe(tmp_w, tmp_b, z, color='k', alpha=0.1)
plt.xlabel("$w$")
plt.ylabel("$b$")
ax[2].zaxis.set_rotate_label(False)
ax[2].xaxis.set_pane_color((1.0, 1.0, 1.0, 0.0))
ax[2].yaxis.set_pane_color((1.0, 1.0, 1.0, 0.0))
ax[2].zaxis.set_pane_color((1.0, 1.0, 1.0, 0.0))
ax[2].set_zlabel("J(w, b)\n\n", rotation=90)
plt.title("Cost(w,b) \n [You can rotate this figure]", size=12)
ax[2].view_init(30, -120)
return fig,ax, [cscat, chline, cvline]
#https://matplotlib.org/stable/users/event_handling.html
class plt_update_onclick:
def __init__(self, fig, ax, x_train,y_train, dyn_items):
self.fig = fig
self.ax = ax
self.x_train = x_train
self.y_train = y_train
self.dyn_items = dyn_items
self.cid = fig.canvas.mpl_connect('button_press_event', self)
def __call__(self, event):
if event.inaxes == self.ax[1]:
ws = event.xdata
bs = event.ydata
cst = compute_cost(self.x_train, self.y_train, ws, bs)
# clear and redraw line plot
self.ax[0].clear()
f_wb = np.dot(self.x_train,ws) + bs
mk_cost_lines(self.x_train,self.y_train,ws,bs,self.ax[0])
plt_house_x(self.x_train, self.y_train, f_wb=f_wb, ax=self.ax[0])
# remove lines and re-add on countour plot and 3d plot
for artist in self.dyn_items:
artist.remove()
a = self.ax[1].scatter(ws,bs, s=100, color=dlblue, zorder= 10, label="cost with \ncurrent w,b")
b = self.ax[1].hlines(bs, self.ax[1].get_xlim()[0],ws, lw=4, color=dlpurple, ls='dotted')
c = self.ax[1].vlines(ws, self.ax[1].get_ylim()[0],bs, lw=4, color=dlpurple, ls='dotted')
d = self.ax[1].annotate(f"Cost: {cst:.0f}", xy= (ws, bs), xytext = (4,4), textcoords = 'offset points',
bbox=dict(facecolor='white'), size = 10)
#Add point in 3D surface plot
e = self.ax[2].scatter3D(ws, bs,cst , marker='X', s=100)
self.dyn_items = [a,b,c,d,e]
self.fig.canvas.draw()
def soup_bowl():
""" Create figure and plot with a 3D projection"""
fig = plt.figure(figsize=(8,8))
#Plot configuration
ax = fig.add_subplot(111, projection='3d')
ax.xaxis.set_pane_color((1.0, 1.0, 1.0, 0.0))
ax.yaxis.set_pane_color((1.0, 1.0, 1.0, 0.0))
ax.zaxis.set_pane_color((1.0, 1.0, 1.0, 0.0))
ax.zaxis.set_rotate_label(False)
ax.view_init(45, -120)
#Useful linearspaces to give values to the parameters w and b
w = np.linspace(-20, 20, 100)
b = np.linspace(-20, 20, 100)
#Get the z value for a bowl-shaped cost function
z=np.zeros((len(w), len(b)))
j=0
for x in w:
i=0
for y in b:
z[i,j] = x**2 + y**2
i+=1
j+=1
#Meshgrid used for plotting 3D functions
W, B = np.meshgrid(w, b)
#Create the 3D surface plot of the bowl-shaped cost function
ax.plot_surface(W, B, z, cmap = "Spectral_r", alpha=0.7, antialiased=False)
ax.plot_wireframe(W, B, z, color='k', alpha=0.1)
ax.set_xlabel("$w$")
ax.set_ylabel("$b$")
ax.set_zlabel("$J(w,b)$", rotation=90)
ax.set_title("$J(w,b)$\n [You can rotate this figure]", size=15)
plt.show()
def inbounds(a,b,xlim,ylim):
xlow,xhigh = xlim
ylow,yhigh = ylim
ax, ay = a
bx, by = b
if (ax > xlow and ax < xhigh) and (bx > xlow and bx < xhigh) \
and (ay > ylow and ay < yhigh) and (by > ylow and by < yhigh):
return True
return False
def plt_contour_wgrad(x, y, hist, ax, w_range=[-100, 500, 5], b_range=[-500, 500, 5],
contours = [0.1,50,1000,5000,10000,25000,50000],
resolution=5, w_final=200, b_final=100,step=10 ):
b0,w0 = np.meshgrid(np.arange(*b_range),np.arange(*w_range))
z=np.zeros_like(b0)
for i in range(w0.shape[0]):
for j in range(w0.shape[1]):
z[i][j] = compute_cost(x, y, w0[i][j], b0[i][j] )
CS = ax.contour(w0, b0, z, contours, linewidths=2,
colors=[dlblue, dlorange, dldarkred, dlmagenta, dlpurple])
ax.clabel(CS, inline=1, fmt='%1.0f', fontsize=10)
ax.set_xlabel("w"); ax.set_ylabel("b")
ax.set_title('Contour plot of cost J(w,b), vs b,w with path of gradient descent')
w = w_final; b=b_final
ax.hlines(b, ax.get_xlim()[0],w, lw=2, color=dlpurple, ls='dotted')
ax.vlines(w, ax.get_ylim()[0],b, lw=2, color=dlpurple, ls='dotted')
base = hist[0]
for point in hist[0::step]:
edist = np.sqrt((base[0] - point[0])**2 + (base[1] - point[1])**2)
if(edist > resolution or point==hist[-1]):
if inbounds(point,base, ax.get_xlim(),ax.get_ylim()):
plt.annotate('', xy=point, xytext=base,xycoords='data',
arrowprops={'arrowstyle': '->', 'color': 'r', 'lw': 3},
va='center', ha='center')
base=point
return
def plt_divergence(p_hist, J_hist, x_train,y_train):
x=np.zeros(len(p_hist))
y=np.zeros(len(p_hist))
v=np.zeros(len(p_hist))
for i in range(len(p_hist)):
x[i] = p_hist[i][0]
y[i] = p_hist[i][1]
v[i] = J_hist[i]
fig = plt.figure(figsize=(12,5))
plt.subplots_adjust( wspace=0 )
gs = fig.add_gridspec(1, 5)
fig.suptitle(f"Cost escalates when learning rate is too large")
#===============
# First subplot
#===============
ax = fig.add_subplot(gs[:2], )
# Print w vs cost to see minimum
fix_b = 100
w_array = np.arange(-70000, 70000, 1000)
cost = np.zeros_like(w_array)
for i in range(len(w_array)):
tmp_w = w_array[i]
cost[i] = compute_cost(x_train, y_train, tmp_w, fix_b)
ax.plot(w_array, cost)
ax.plot(x,v, c=dlmagenta)
ax.set_title("Cost vs w, b set to 100")
ax.set_ylabel('Cost')
ax.set_xlabel('w')
ax.xaxis.set_major_locator(MaxNLocator(2))
#===============
# Second Subplot
#===============
tmp_b,tmp_w = np.meshgrid(np.arange(-35000, 35000, 500),np.arange(-70000, 70000, 500))
z=np.zeros_like(tmp_b)
for i in range(tmp_w.shape[0]):
for j in range(tmp_w.shape[1]):
z[i][j] = compute_cost(x_train, y_train, tmp_w[i][j], tmp_b[i][j] )
ax = fig.add_subplot(gs[2:], projection='3d')
ax.plot_surface(tmp_w, tmp_b, z, alpha=0.3, color=dlblue)
ax.xaxis.set_major_locator(MaxNLocator(2))
ax.yaxis.set_major_locator(MaxNLocator(2))
ax.set_xlabel('w', fontsize=16)
ax.set_ylabel('b', fontsize=16)
ax.set_zlabel('\ncost', fontsize=16)
plt.title('Cost vs (b, w)')
# Customize the view angle
ax.view_init(elev=20., azim=-65)
ax.plot(x, y, v,c=dlmagenta)
return
# draw derivative line
# y = m*(x - x1) + y1
def add_line(dj_dx, x1, y1, d, ax):
x = np.linspace(x1-d, x1+d,50)
y = dj_dx*(x - x1) + y1
ax.scatter(x1, y1, color=dlblue, s=50)
ax.plot(x, y, '--', c=dldarkred,zorder=10, linewidth = 1)
xoff = 30 if x1 == 200 else 10
ax.annotate(r"$\frac{\partial J}{\partial w}$ =%d" % dj_dx, fontsize=14,
xy=(x1, y1), xycoords='data',
xytext=(xoff, 10), textcoords='offset points',
arrowprops=dict(arrowstyle="->"),
horizontalalignment='left', verticalalignment='top')
def plt_gradients(x_train,y_train, f_compute_cost, f_compute_gradient):
#===============
# First subplot
#===============
fig,ax = plt.subplots(1,2,figsize=(12,4))
# Print w vs cost to see minimum
fix_b = 100
w_array = np.linspace(-100, 500, 50)
w_array = np.linspace(0, 400, 50)
cost = np.zeros_like(w_array)
for i in range(len(w_array)):
tmp_w = w_array[i]
cost[i] = f_compute_cost(x_train, y_train, tmp_w, fix_b)
ax[0].plot(w_array, cost,linewidth=1)
ax[0].set_title("Cost vs w, with gradient; b set to 100")
ax[0].set_ylabel('Cost')
ax[0].set_xlabel('w')
# plot lines for fixed b=100
for tmp_w in [100,200,300]:
fix_b = 100
dj_dw,dj_db = f_compute_gradient(x_train, y_train, tmp_w, fix_b )
j = f_compute_cost(x_train, y_train, tmp_w, fix_b)
add_line(dj_dw, tmp_w, j, 30, ax[0])
#===============
# Second Subplot
#===============
tmp_b,tmp_w = np.meshgrid(np.linspace(-200, 200, 10), np.linspace(-100, 600, 10))
U = np.zeros_like(tmp_w)
V = np.zeros_like(tmp_b)
for i in range(tmp_w.shape[0]):
for j in range(tmp_w.shape[1]):
U[i][j], V[i][j] = f_compute_gradient(x_train, y_train, tmp_w[i][j], tmp_b[i][j] )
X = tmp_w
Y = tmp_b
n=-2
color_array = np.sqrt(((V-n)/2)**2 + ((U-n)/2)**2)
ax[1].set_title('Gradient shown in quiver plot')
Q = ax[1].quiver(X, Y, U, V, color_array, units='width', )
ax[1].quiverkey(Q, 0.9, 0.9, 2, r'$2 \frac{m}{s}$', labelpos='E',coordinates='figure')
ax[1].set_xlabel("w"); ax[1].set_ylabel("b")
lab_utils_common.py
"""
lab_utils_common.py
functions common to all optional labs, Course 1, Week 2
"""
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('./deeplearning.mplstyle')
dlblue = '#0096ff'; dlorange = '#FF9300'; dldarkred='#C00000'; dlmagenta='#FF40FF'; dlpurple='#7030A0';
dlcolors = [dlblue, dlorange, dldarkred, dlmagenta, dlpurple]
dlc = dict(dlblue = '#0096ff', dlorange = '#FF9300', dldarkred='#C00000', dlmagenta='#FF40FF', dlpurple='#7030A0')
##########################################################
# Regression Routines
##########################################################
#Function to calculate the cost
def compute_cost_matrix(X, y, w, b, verbose=False):
"""
Computes the gradient for linear regression
Args:
X (ndarray (m,n)): Data, m examples with n features
y (ndarray (m,)) : target values
w (ndarray (n,)) : model parameters
b (scalar) : model parameter
verbose : (Boolean) If true, print out intermediate value f_wb
Returns
cost: (scalar)
"""
m = X.shape[0]
# calculate f_wb for all examples.
f_wb = X @ w + b
# calculate cost
total_cost = (1/(2*m)) * np.sum((f_wb-y)**2)
if verbose: print("f_wb:")
if verbose: print(f_wb)
return total_cost
def compute_gradient_matrix(X, y, w, b):
"""
Computes the gradient for linear regression
Args:
X (ndarray (m,n)): Data, m examples with n features
y (ndarray (m,)) : target values
w (ndarray (n,)) : model parameters
b (scalar) : model parameter
Returns
dj_dw (ndarray (n,1)): The gradient of the cost w.r.t. the parameters w.
dj_db (scalar): The gradient of the cost w.r.t. the parameter b.
"""
m,n = X.shape
f_wb = X @ w + b
e = f_wb - y
dj_dw = (1/m) * (X.T @ e)
dj_db = (1/m) * np.sum(e)
return dj_db,dj_dw
# Loop version of multi-variable compute_cost
def compute_cost(X, y, w, b):
"""
compute cost
Args:
X (ndarray (m,n)): Data, m examples with n features
y (ndarray (m,)) : target values
w (ndarray (n,)) : model parameters
b (scalar) : model parameter
Returns
cost (scalar) : cost
"""
m = X.shape[0]
cost = 0.0
for i in range(m):
f_wb_i = np.dot(X[i],w) + b #(n,)(n,)=scalar
cost = cost + (f_wb_i - y[i])**2
cost = cost/(2*m)
return cost
def compute_gradient(X, y, w, b):
"""
Computes the gradient for linear regression
Args:
X (ndarray (m,n)): Data, m examples with n features
y (ndarray (m,)) : target values
w (ndarray (n,)) : model parameters
b (scalar) : model parameter
Returns
dj_dw (ndarray Shape (n,)): The gradient of the cost w.r.t. the parameters w.
dj_db (scalar): The gradient of the cost w.r.t. the parameter b.
"""
m,n = X.shape #(number of examples, number of features)
dj_dw = np.zeros((n,))
dj_db = 0.
for i in range(m):
err = (np.dot(X[i], w) + b) - y[i]
for j in range(n):
dj_dw[j] = dj_dw[j] + err * X[i,j]
dj_db = dj_db + err
dj_dw = dj_dw/m
dj_db = dj_db/m
return dj_db,dj_dw
效果

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 芯课堂 | LVGL基础知识(四)
- R语言【paleobioDB】——pbdb_reference():通过参数请求获得多条参考文献的基本信息
- JVM的类的生命周期
- 【二分查找】LCR 172. 统计目标成绩的出现次数
- (蓝桥杯每日一题)平方末尾及补充(常用的字符串函数功能)
- spring 笔记二 spring配置数据源和整合测试功能
- C#微信公众号HIS预约挂号系统源码
- Vue-20、Vue监测数组改变
- mysql 表锁 行锁
- Word使用技巧【开题报告】