从零开始,自己搭建一个autonomous mobile robot做gazebo仿真(1):mobile robot建模与添加差速控制器
发布时间:2024年01月20日
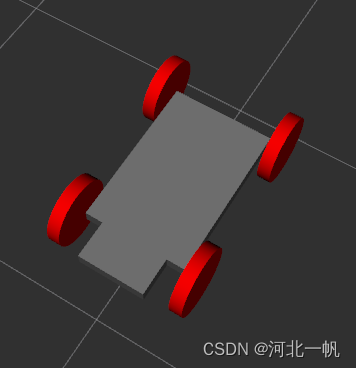
这样一个简单的mobile robot模型
?首先写xacro文件,创建 link joint transmission
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="whill_modelc" >
<xacro:property name="PI" value="3.1415926"/>
<link name="base_link">
<visual>
<geometry>
<sphere radius="0.001" />
</geometry>
</visual>
</link>
<link name="base_floor">
<visual>
<geometry>
<box size="0.600 0.400 0.050"/>
</geometry>
<material name="grey">
<color rgba="0.5 0.5 0.5 1.0"/>
</material>
</visual>
<collision>
<geometry>
<box size="0.600 0.400 0.050"/>
</geometry>
</collision>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0" />
<mass value="40" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0"
iyy="1.0" iyz="0.0"
izz="1.0" />
</inertial>
</link>
<joint name="base_body_joint" type="fixed">
<parent link="base_link" />
<child link="base_floor" />
<origin xyz="0.3 0 0.0" rpy="0 0 0"/>
</joint>
<link name="footrest_link">
<collision>
<geometry>
<box size="0.250 0.260 0.050"/>
</geometry>
</collision>
<visual>
<geometry>
<box size="0.250 0.260 0.050"/>
</geometry>
<material name="grey">
<color rgba="0.5 0.5 0.5 1.0"/>
</material>
</visual>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0" />
<mass value="1" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0"
iyy="1.0" iyz="0.0"
izz="1.0" />
</inertial>
</link>
<joint name="footrest_joint" type="fixed">
<parent link="base_floor" />
<child link="footrest_link" />
<origin xyz="0.320 0 0" rpy="0 0 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<geometry>
<cylinder length="0.05" radius="0.1325"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="black" />
</visual>
<collision>
<geometry>
<cylinder length="0.05" radius="0.1325"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<inertial>
<mass value="0.500"/>
<inertia ixx="0.0013541667" ixy="0" ixz="0" iyy="0.0013541667" iyz="0" izz="0.0025"/>
</inertial>
</link>
<joint name="leftWheel" type="continuous">
<parent link="base_floor" />
<child link="left_wheel_link" />
<origin xyz="-0.3 0.245 0" rpy="${-PI / 2} 0.0 0.0" />
<axis xyz="0 0 1" />
</joint>
<link name="right_wheel_link">
<visual>
<geometry>
<cylinder length="0.05" radius="0.1325"/>
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black" />
</visual>
<collision>
<geometry>
<cylinder length="0.05" radius="0.1325"/>
</geometry>
<origin xyz="0 0 0" rpy="0.0 0.0 0.0" />
</collision>
<inertial>
<mass value="0.500"/>
<inertia ixx="0.0013541667" ixy="0" ixz="0" iyy="0.0013541667" iyz="0" izz="0.0025"/>
</inertial>
</link>
<joint name="rightWheel" type="continuous">
<parent link="base_floor" />
<child link="right_wheel_link" />
<origin xyz="-0.3 -0.245 0" rpy="${-PI / 2} 0.0 0.0" />
<axis xyz="0 0 1" />
</joint>
<link name="frontwheel_left">
<collision>
<geometry>
<cylinder length="0.05" radius="0.1325"/>
</geometry>
</collision>
<visual>
<geometry>
<cylinder length="0.05" radius="0.1325"/>
</geometry>
<material name="black" />
</visual>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0" />
<mass value="1.0" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0"
iyy="1.0" iyz="0.0"
izz="1.0" />
</inertial>
</link>
<joint name="frontwheel_left_joint" type="fixed">
<parent link="base_floor" />
<child link="frontwheel_left" />
<origin xyz="0.3 -0.245 0" rpy="1.57 0 0" />
<axis xyz="0 0 1" />
</joint>
<link name="frontwheel_right">
<collision>
<geometry>
<cylinder length="0.05" radius="0.1325"/>
</geometry>
</collision>
<visual>
<geometry>
<cylinder length="0.05" radius="0.1325"/>
</geometry>
<material name="black" />
</visual>
<inertial>
<origin xyz="0 0 0" rpy="0 0 0" />
<mass value="1.0" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0"
iyy="1.0" iyz="0.0"
izz="1.0" />
</inertial>
</link>
<joint name="frontwheel_right_joint" type="fixed">
<parent link="base_floor" />
<child link="frontwheel_right"/>
<origin xyz="0.3 0.245 0" rpy="1.57 0 0" />
<axis xyz="0 0 -1" />
</joint>
<!-- =============== Transmission =============== -->
<transmission name="right_wheel_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="rightWheel">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="right_wheel_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>30</mechanicalReduction>
</actuator>
</transmission>
<transmission name="left_wheel_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="leftWheel">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="left_wheel_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>30</mechanicalReduction>
</actuator>
</transmission>
<gazebo reference="base_floor">
<selfCollide>true</selfCollide>
<mu1 value="0.05" />
<mu2 value="0.05" />
</gazebo>
<gazebo reference="sensor_arm_link">
<selfCollide>true</selfCollide>
<mu1 value="0.05" />
<mu2 value="0.05" />
</gazebo>
<gazebo reference="rearwheel_right">
<selfCollide>true</selfCollide>
<mu1 value="1.0" />
<mu2 value="1.0" />
</gazebo>
<gazebo reference="rearwheel_left">
<selfCollide>true</selfCollide>
<mu1 value="1.0" />
<mu2 value="1.0" />
</gazebo>
<gazebo reference="frontwheel_right">
<selfCollide>true</selfCollide>
<mu1 value="0.0" />
<mu2 value="0.0" />
</gazebo>
<gazebo reference="frontwheel_left">
<selfCollide>true</selfCollide>
<mu1 value="0.0" />
<mu2 value="0.0" />
</gazebo>
</robot>
创建xcaro模型时,下面几个地方要注意:
(1)
车轮是一个cylinder link,
<link name="right_wheel_link">
<visual>
<geometry>
<cylinder length="0.05" radius="0.1325"/>
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black" />
</visual>
<collision>
<geometry>
<cylinder length="0.05" radius="0.1325"/>
</geometry>
<origin xyz="0 0 0" rpy="0.0 0.0 0.0" />
</collision>link的局部坐标系原点在这个物体的形心,右手坐标系。
<joint name="rightWheel" type="continuous">
<parent link="base_floor" />
<child link="right_wheel_link" />
<origin xyz="-0.3 -0.245 0" rpy="${-PI / 2} 0.0 0.0" />
<axis xyz="0 0 1" />
</joint>车轮在跟父link连接的时候,放在父link局部坐标系中-0.3 -0.245 0这个位置,然后绕child link自己的X轴转-90度(rpy=-pi/2 0 0),也就是这样转下来,原来的z轴转到原来的y轴位置
<axis xyz="0 0 1" />这句话的意思是,这个物体绕自己的z轴旋转(注意z轴已经有刚才的 rpy命令移动了) 。
注意左右车轮的z轴正向要是一致的,否则会出现,你给往前走的指令,robot旋转,你给旋转的指令,robot反而向前走直线!
transmission是给车轮绑定一个gazebo中的电机
然后在transmission下面加入一个双轮差速控制器
<gazebo>
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>leftWheel</leftJoint> <!-- 左轮 -->
<rightJoint>rightWheel</rightJoint> <!-- 右轮 -->
<wheelSeparation>0.49</wheelSeparation> <!-- 车轮间距 -->
<wheelDiameter>0.265</wheelDiameter> <!-- 车轮直径 -->
<broadcastTF>false</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic> <!-- 运动控制话题 -->
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic> <!-- 里程计话题 -->
<robotBaseFrame>base_link</robotBaseFrame> <!-- 根坐标系 -->
</plugin>
</gazebo>在给双轮差速器发送控制指令的时候,topic是robotNamespace+commandTopic,具体来说,robotNamespace是 / ,commandTopic是 cmd_vel,那就要发送 /cmd_vel,如果robotNamespace是 /robot,那就要发送 /robot/cmd_vel
下一步写luanch文件
<launch>
<!-- these are the arguments you can pass this launch file, for example paused:=true -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- We resume the logic in empty_world.launch -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- Load the URDF into the ROS Parameter Server -->
<param name="robot_description" command="$(find xacro)/xacro '$(find ros_whill)/xacro/modelc.xacro'" />
<!-- Run a python script to the send a service call to gazebo_ros to spawn a URDF robot -->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model whill_modelc -param robot_description"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher">
<remap from="/joint_states" to="/whill_modelc/joint_states" />
</node>
</launch>用rqt发送控制指令,rviz可视化,rviz可视化的时候,注意 Fixed Frame是odom
不然就会看到,robot在rviz中不动,odom坐标系在往后退
文章来源:https://blog.csdn.net/qq_41816368/article/details/135713509
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 你好,C++(4)2.1.3 我的父亲母亲:编译器和链接器 2.1.4 C++程序执行背后的故事
- VSCode配置python环境
- 【从零开始学习Redis | 第七篇】利用Redis构造全局唯一ID(含其他构造方法)
- Python 镜像源使用指南:加速你的开发过程
- Flink窗口的概念和分类
- 041.Python异常处理_初识异常
- 基于SPI的插件式开发实现方案之@AutoService+ServiceLoader介绍及Dolphinscheduler中的实际应用
- 【C++PCL】点云处理最小三维圆拟合
- 文章解读与仿真程序复现思路——电力自动化设备EI\CSCD\北大核心《计及备用风险性的新型电力系统源网协同安全经济调度》
- 网络安全(黑客)自学启蒙