论文阅读2---多线激光lidar内参标定原理
发布时间:2024年01月23日
前言:该论文介绍多线激光lidar的标定内参的原理,有兴趣的,可研读原论文。
1、标定参数
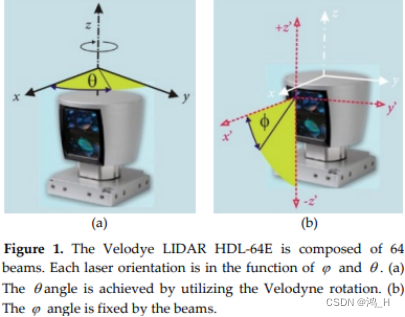
rotCorrection:旋转修正角,每束激光的方位角偏移(与当前旋转角度的偏移,正值表示激光束逆时针旋转),如图1 a
vertCorrection:垂直校正角,每束激光的仰角(正值使激光束朝扫描仪顶部旋转),如图1 b
distCorrection:距离校正偏移,应用于单个激光束的飞行时间距离
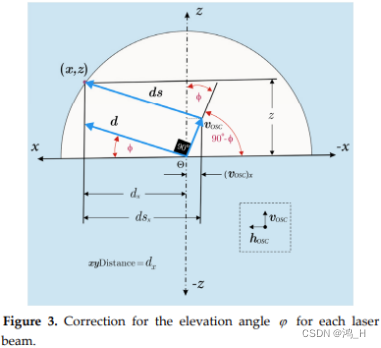
vertOffsetCorrection:与激光束正交的垂直视差校正,如图3
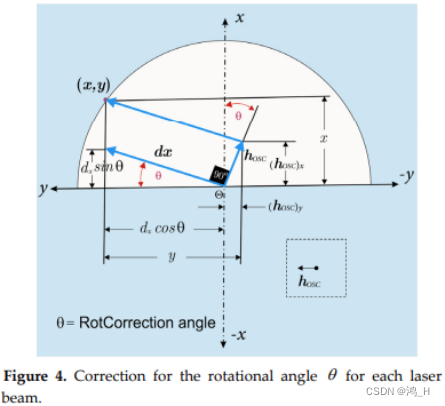
horizOffsetCorrection:与激光束正交的水平视差校正,如图4
2、数学模型
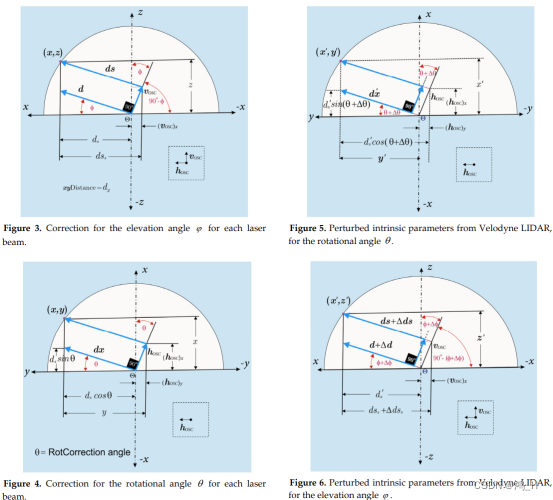
对于某一个线,均有扰动方程:

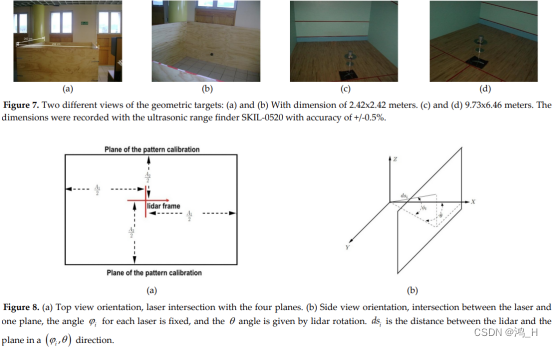
3、标定过程
激光lidar放到5面尺寸已知的封闭空间;假设激光雷达z轴垂直底面,四面墙壁构成的空间也是已知,因此可算得每个点的距离ds。本质还是一个根据先验值进行一个非线性优化过程。
参考论文:LIDAR Velodyne HDL-64E Calibration Using Pattern Planes
###########
好记性不如烂笔头
积硅步期千里
文章来源:https://blog.csdn.net/qq_45701501/article/details/135779662
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 如何构建高效测试体系?掌握5大自动化测试模式就够了
- 全志图形引擎 以 F1C200s 为例介绍
- Linux 上 Nginx 配置访问 web 服务器及配置 https 访问配置过程记录
- 2024年【广东省安全员B证第四批(项目负责人)】新版试题及广东省安全员B证第四批(项目负责人)作业模拟考试
- 数据安全传输基础设施平台(二)
- SQL Server命令大全
- xtu oj 1522 格子
- 此man非man的意思
- linux安装miniconda3、多环境配置
- 智能优化算法应用:基于骑手优化算法3D无线传感器网络(WSN)覆盖优化 - 附代码