APM传感器校准
发布时间:2024年01月15日
前言
固件:rover 4.2.3
地面站:独家汉化版QGC
一、校准加速度计
点击左上角软件图标-》载具设置-》传感器-》加速度计
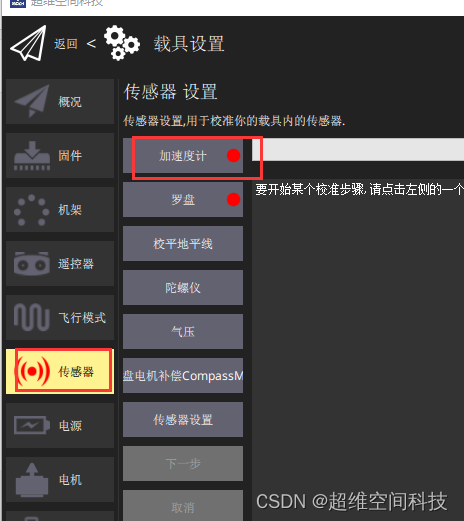
飞控方向默认为None即可,点击确定
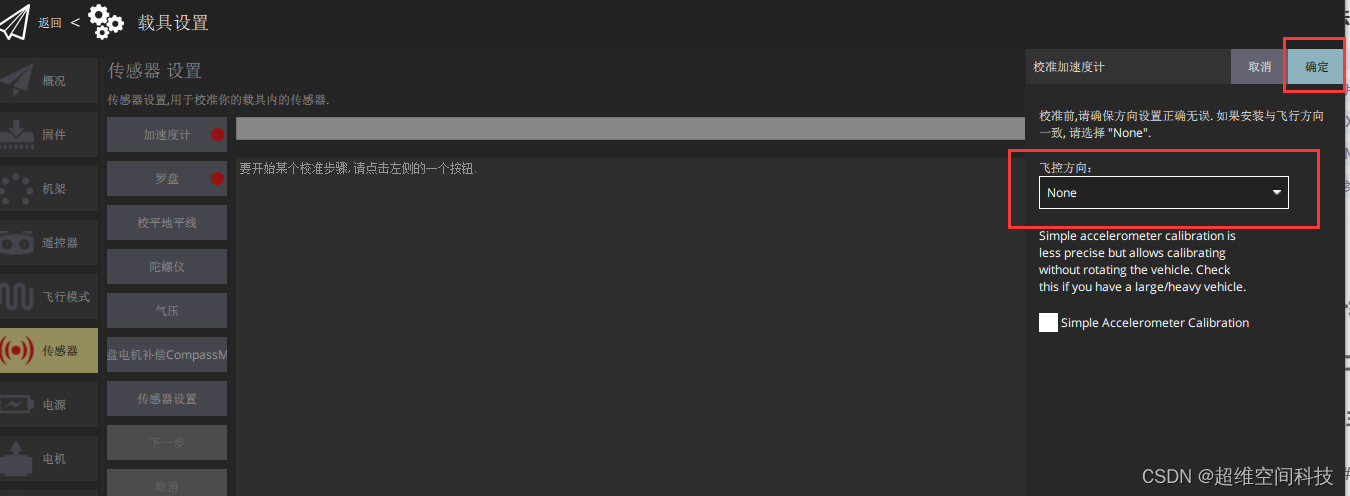
点击确定后,地面的水平面图标会变成黄色,此时将飞控保持水平静止。然后点击下一步。
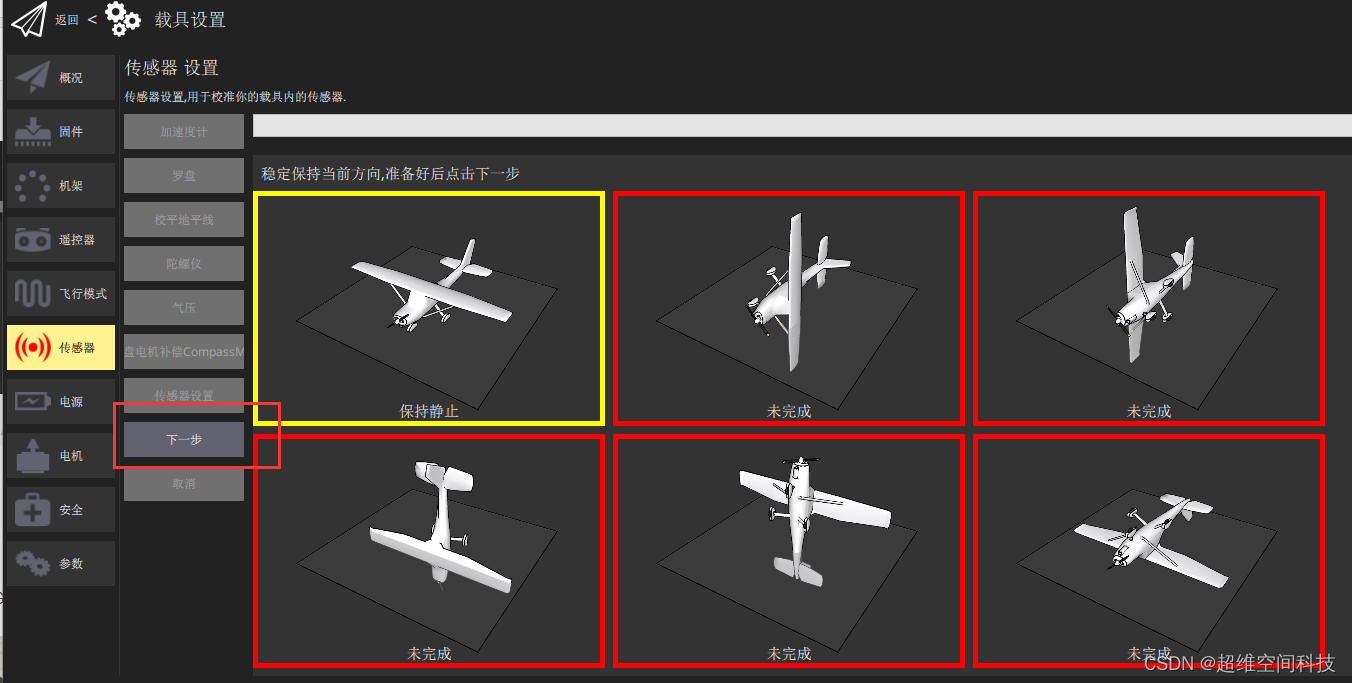
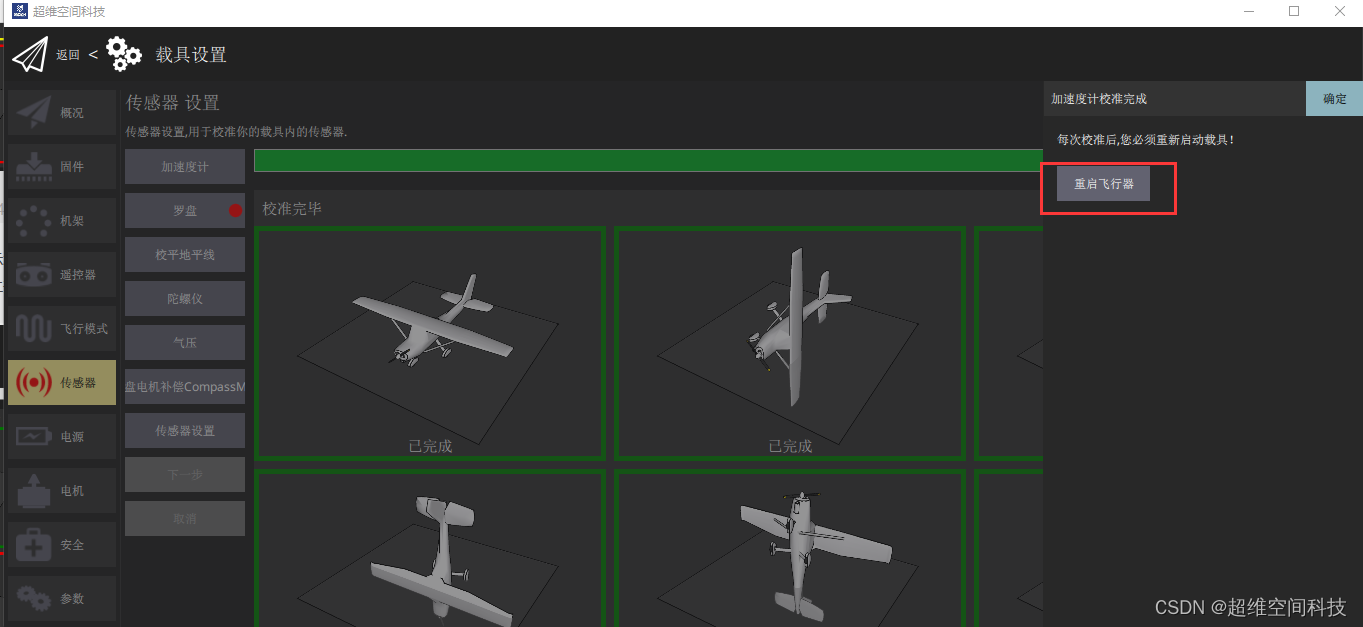
点击完后水平面图标会变成绿色,表示水平面已校准完成。同时地面站的另一个面会变成黄色,然后再将飞控保持根据提示的面保持静止并点击下一步即可,直到六个面都教程完成、

都校准完后,会提示重启飞行器,点击重启即可。
二、校准罗盘
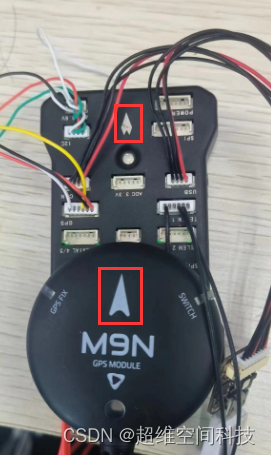
校准罗盘前,确保飞控罗盘的方向与GPS罗盘的方向一致
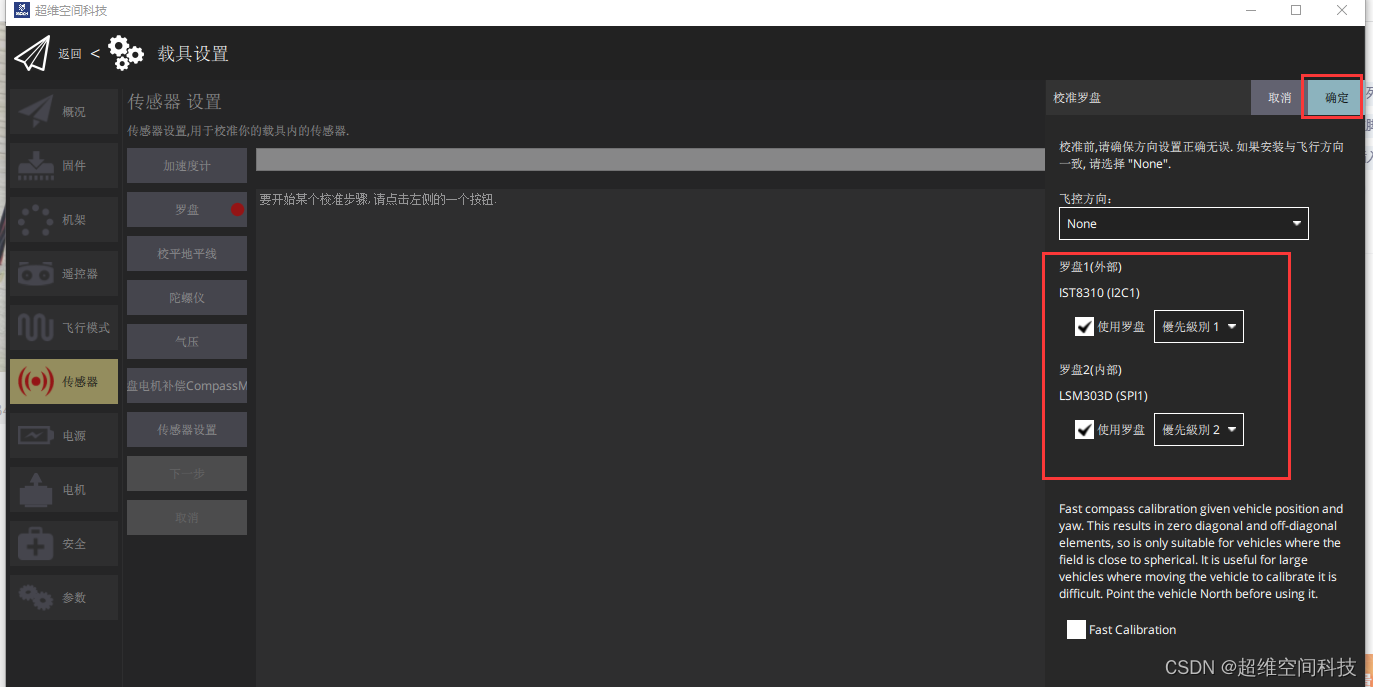
点击左上角软件图标-》载具设置-》传感器-》罗盘
会出现下面提示,设置罗盘优先级,一般设置外置罗盘的优先级为最高,然后点击确定
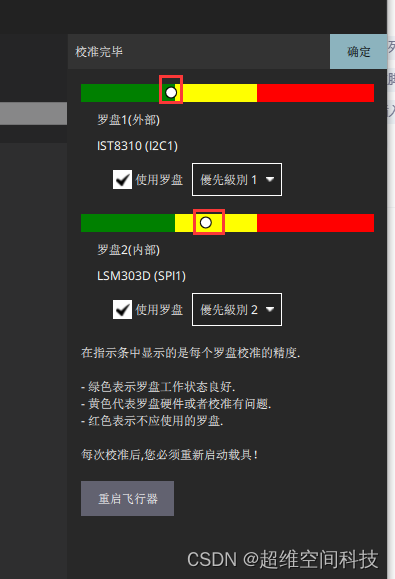
然后往各个方向不断的旋转飞控,直到上方绿色进度条满即可。校准完成后,会弹出下面的提示
如果有罗盘的精度在红色区域,需要将其禁用。没问题的话重启飞行器即可。
三、校准陀螺仪
点击左上角软件图标-》载具设置-》传感器-》陀螺仪
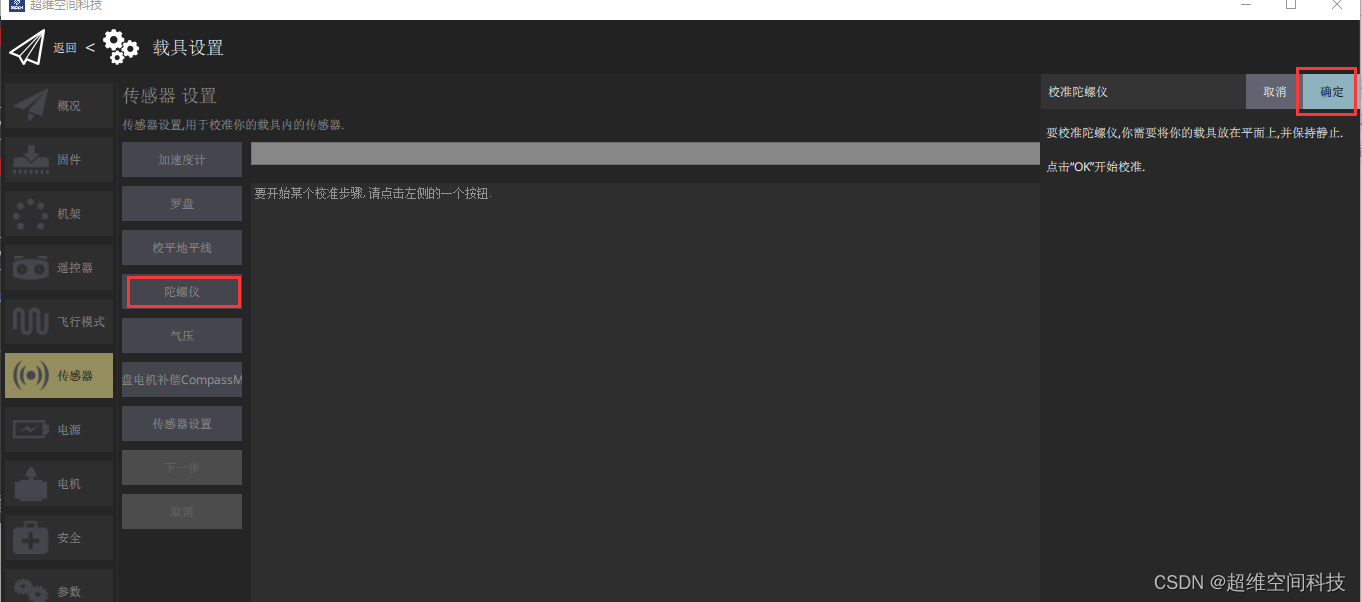
出现下面的提示就表示校准完成
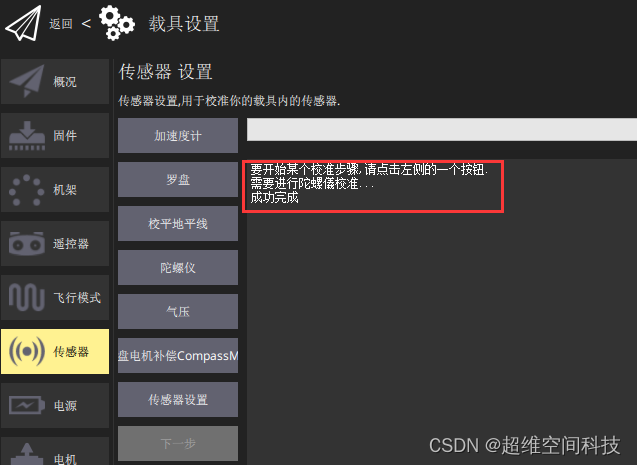
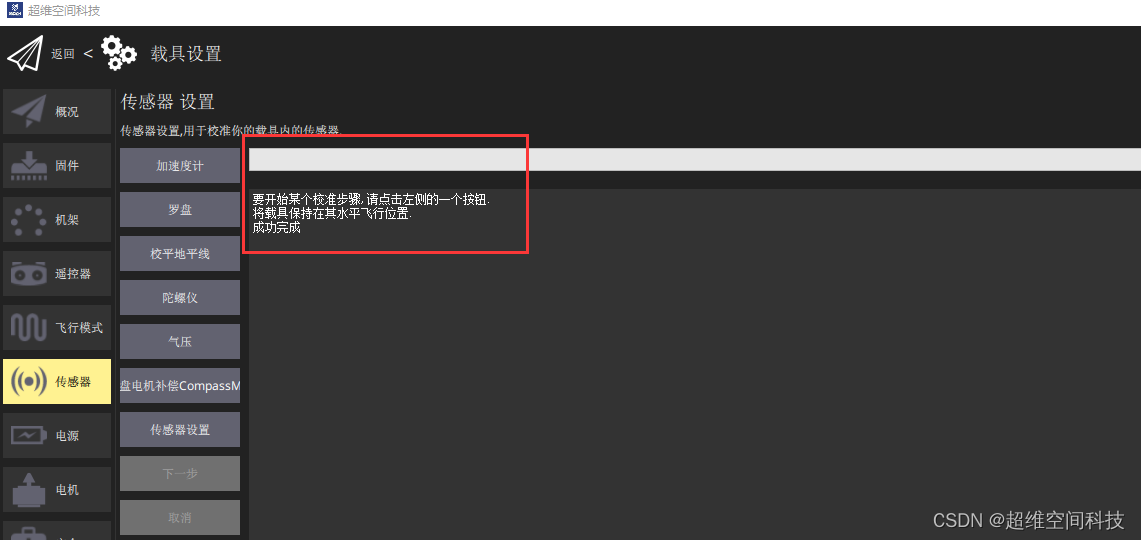
四、校平地平线
点击左上角软件图标-》载具设置-》传感器-》校平地平线
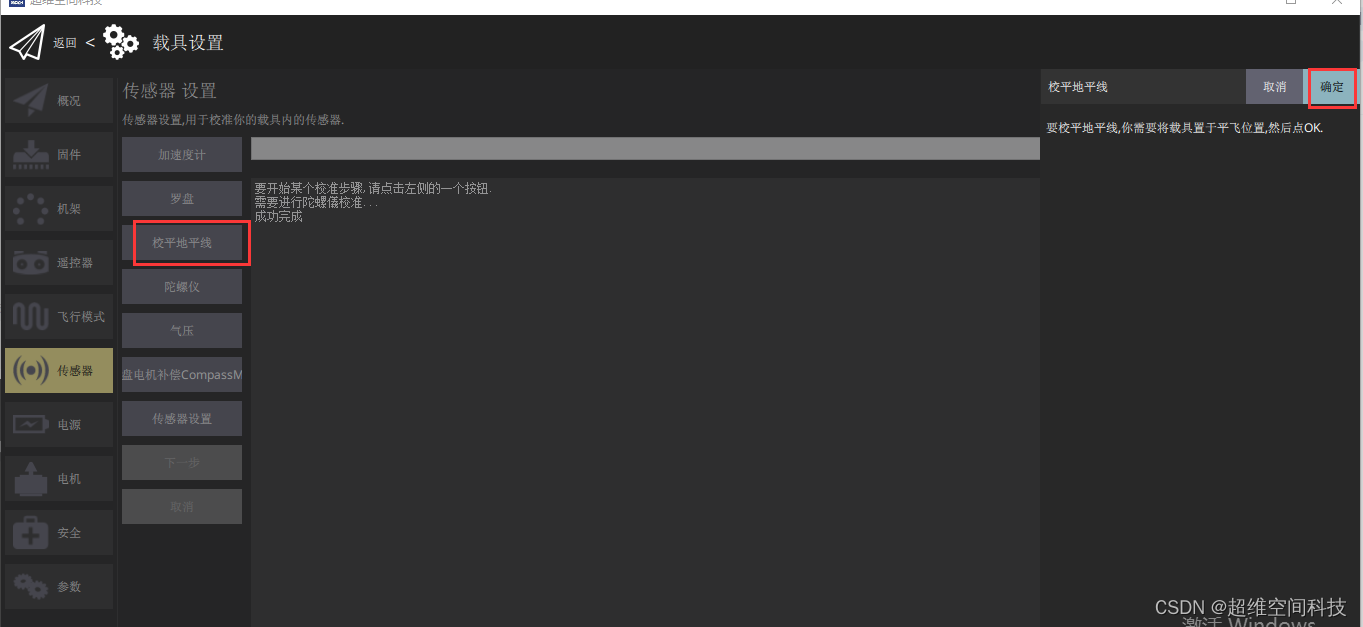
出现下面的提示就表示校准完成
文章来源:https://blog.csdn.net/qq_38768959/article/details/135598336
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- T-ITS论文分享:一种用于具有缺失数据的交通预测多任务学习方法
- 【pandas_将行索引作为字典的键名,对应的明细作为字典的值】
- qt 子窗口全屏,按ESC无法退出全屏原因
- Mysql-全局锁、表锁、行锁
- Qt基础-QtGlobal常用的全局函数及随机数产生实例
- 自学(网络安全)黑客——高效学习2024
- 户用光伏市场前景如何?
- 视频怎么转文字稿?春晚主持人金句就用这个工具进行转写操作
- CloudCanal x Debezium 打造实时数据流动新范式
- Python基础语法笔记 tkinter的简单使用