模拟数字转换器
本节主要介绍以下内容:
ADC简介
ADC功能框图详解
参考资料:《零死角玩转STM32》“ADC—电压采集”章节
一、ADC简介
ADC? :Analog to Digital,模拟数字转换器
- 三个独立的ADC 1 / 2 / 3
- 分辨率为12位
- 每个ADC具有18个通道,其中外部通道16个
二、ADC功能框图讲解?
框图主要分为以下七个部分:
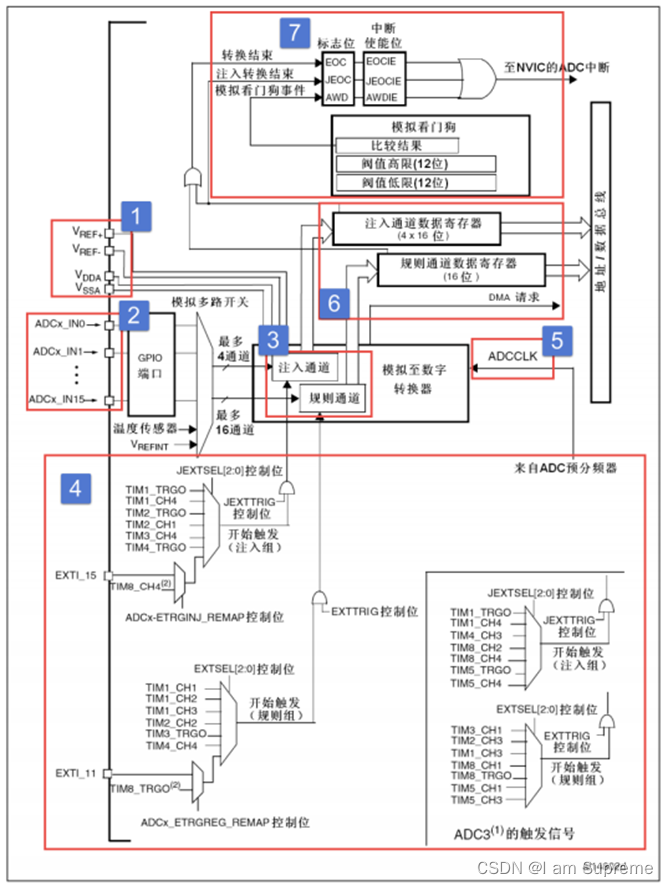
1-电压输入范围? ?2-输入通道? ?3-转换顺序? 4-触发源? ? 5-转换时间? ? 6-数据寄存器? 7-中断
2.1 电压输入范围
????????ADC 输入范围为:VREF- ≤ VIN ≤ VREF+。由VREF-、VREF+ 、VDDA 、VSSA、这四个外部引脚决定。我们在设计原理图的时候一般把VSSA和VREF-接地,把VREF+和VDDA 接3V3,得到ADC的输入电压范围为:0~3.3V。
????????如果我们想让输入的电压范围变宽,去到可以测试负电压或者更高的正电压,我们可以在外部加一个电压调理电路,把需要转换的电压抬升或者降压到0~3.3V,这样ADC 就可以测量了
输入电压:VREF- ≤ VIN ≤ VREF+
决定输入电压的引脚:VREF-、 VREF+ 、 VDDA 、 VSSA
VSSA 和 VREF-接地,把 VREF+和 VDDA 接 3V3,得到ADC 的输入电压范围为: 0~3.3V。
那么超出0~3.3V的电压怎么测?
ADC可以测量:-10V~10V
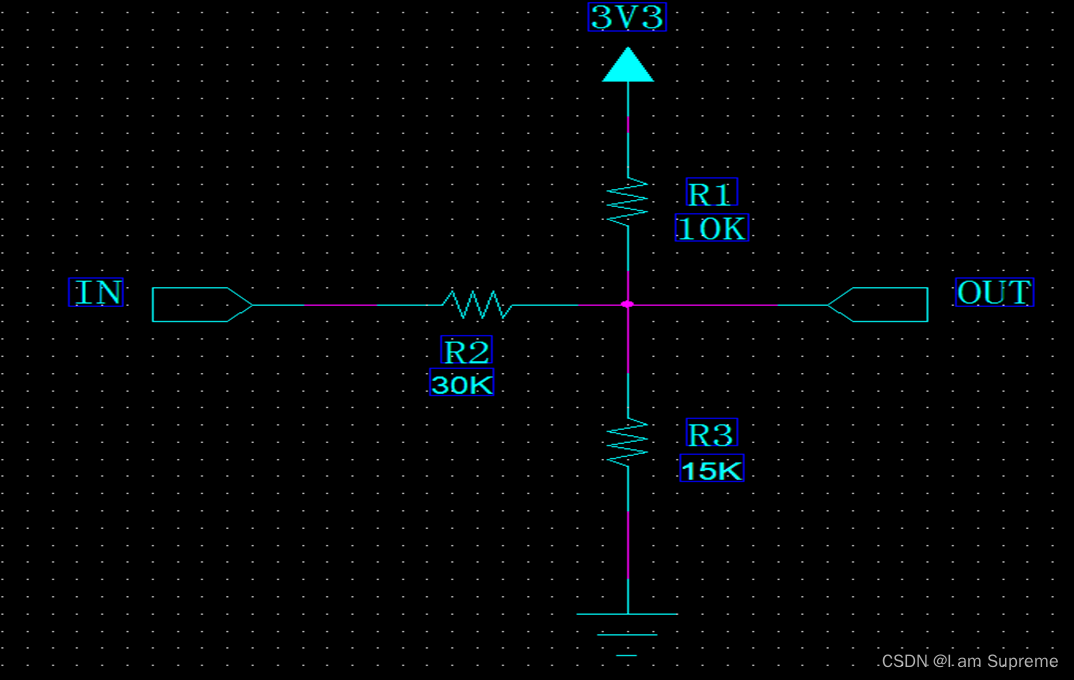
根据基尔霍夫定律(KCL),节点流入的电流等于流出的电流
(Vint – Vout)/R2 + (3V3-Vout)/R1 = Vout / R3
Vout = (Vint + 10) /6?
2.2 输入通道
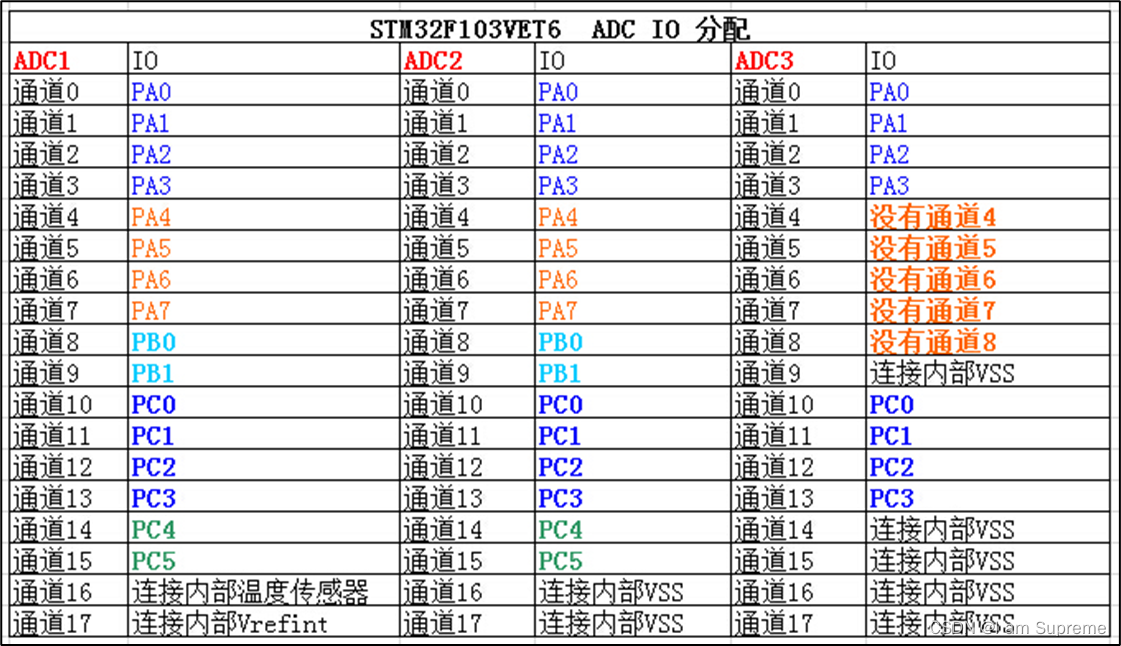
????????我们确定好ADC 输入电压之后,那么电压怎么输入到ADC?这里我们引入通道的概念,STM32 的ADC 多达18 个通道,其中外部的16 个通道就是框图中的ADCx_IN0、ADCx_IN1...ADCx_IN5。这16 个通道对应着不同的IO 口,具体是哪一个IO 口可以从手册查询到。其中ADC1/2/3 还有内部通道:ADC1的通道16连接到了芯片内部的温度传感器,Vrefint 连接到了通道17。ADC2 的模拟通道16 和17 连接到了内部的VSS。ADC3 的模拟通道9、14、15、16 和17 连接到了内部的VSS。
每个ADC具有18个通道,其中外部通道16个

2.3 输入通道分类
????????外部的 16 个通道在转换的时候又分为规则通道和注入通道,其中规则通道最多有 16路,注入通道最多有 4 路。那这两个通道有什么区别?在什么时候使用?
规则通道:顾名思意,规则通道就是很规矩的意思,我们平时一般使用的就是这个通道。
注入通道:注入,可以理解为插入,插队的意思,是一种不安分的通道。它是一种在规则通道转换的时候强行插入要转换的一种。这点跟中断程序很像,都是不安分的主。所以,注入通道只有在规则通道存在时才会出现。(平时不需要使用)
2.3.1 通道转换顺序
????????由寄存器来决定规则通道的转换顺序,叫规则序列寄存器,SQR1 2 3 分别控制不同通道的转换方式,比如SQR3控制通道1-6的转换设计,2^4 = 16,可以取值到1-16,如果取1,表示通道1,第一个转换,取2,表示通道2,第一个转换。
????????规则序列寄存器有3 个,分别为SQR3、SQR2、SQR1。SQR3 控制着规则序列中的第
一个到第六个转换,对应的位为:SQ1[4:0]~SQ6[4:0],第一次转换的是位4:0 SQ1[4:0],如
果通道16 想第一次转换,那么在SQ1[4:0]写16 即可。SQR2 控制着规则序列中的第7 到第
12 个转换,对应的位为:SQ7[4:0]~SQ12[4:0],如果通道1 想第8 个转换,则SQ8[4:0]写1
即可。SQR1 控制着规则序列中的第13 到第16 个转换,对应位为:SQ13[4:0]~SQ16[4:0],
如果通道6 想第10 个转换,则SQ10[4:0]写6 即可。具体使用多少个通道,由SQR1 的位
L[3:0]决定,最多16 个通道。

2.4 触发源
?????通道选好了,转换的顺序也设置好了,那接下来就该开始转换了。ADC 转换可以由
ADC 控制寄存器2: ADC_CR2 的ADON 这个位来控制,写1 的时候开始转换,写0 的时候
停止转换,这个是最简单也是最好理解的开启ADC 转换的控制方式,理解起来没啥技术含
量。
????????除了这种庶民式的控制方法,ADC 还支持触发转换,这个触发包括内部定时器触发和
外部IO 触发。触发源有很多,具体选择哪一种触发源,由ADC 控制寄存器2:ADC_CR2 的
EXTSEL[2:0] 和JEXTSEL[2:0]位来控制。EXTSEL[2:0]用于选择规则通道的触发源,
JEXTSEL[2:0]用于选择注入通道的触发源。选定好触发源之后,触发源是否要激活,则由
ADC 控制寄存器2:ADC_CR2 的EXTTRIG 和JEXTTRIG 这两位来激活。其中ADC3 的规则转
换和注入转换的触发源与ADC1/2 的有所不同,在框图上已经表示出来。
1、软件触发:ADC_CR2 :ADON/SWST? ? ? ?ART/JSWSTART
2、外部事件触发:内部定时器/外部IO
选择:ADC_CR2 :EXTSEL[2:0]和 JEXTSEL[2:0]
激活:ADC_CR2 :EXTEN 和 JEXTEN
2.5 转换时间
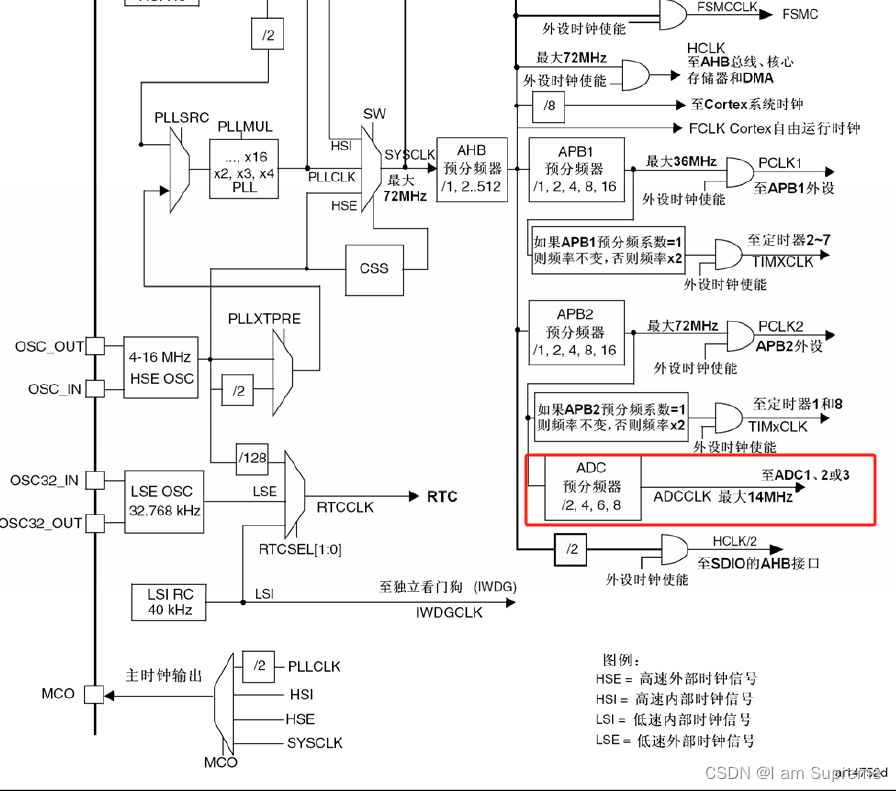
????????ADC 输入时钟ADC_CLK 由PCLK2 经过分频产生,最大是14M,分频因子由RCC 时
钟配置寄存器RCC_CFGR 的位15:14 ADCPRE[1:0]设置,可以是2/4/6/8 分频,注意这里没
有1 分频。一般我们设置PCLK2=HCLK=72M。
????????ADC 使用若干个ADC_CLK 周期对输入的电压进行采样,采样的周期数可通过ADC
采样时间寄存器ADC_SMPR1 和ADC_SMPR2 中的SMP[2:0]位设置,ADC_SMPR2 控制的
是通道0~9,ADC_SMPR1 控制的是通道10~17。每个通道可以分别用不同的时间采样。其
中采样周期最小是1.5 个,即如果我们要达到最快的采样,那么应该设置采样周期为1.5 个
周期,这里说的周期就是1/ADC_CLK。
????????ADC 的转换时间跟ADC 的输入时钟和采样时间有关,公式为:Tconv = 采样时间 +
12.5 个周期。当ADCLK = 14MHZ (最高),采样时间设置为1.5 周期(最快),那么总
的转换时间(最短)Tconv = 1.5 周期 + 12.5 周期 = 14 周期 = 1us。
一般我们设置PCLK2=72M,经过ADC 预分频器能分频到最大的时钟只能是12M,采
样周期设置为1.5 个周期,算出最短的转换时间为1.17us,这个才是最常用的。
转换时间:Tconv = 采样时间 + 12.5 个周期
ADC_CLK:ADC模拟电路时钟,最大值为14M,由PCLK2提供,还可分频,2/4/6/8,RCC_CFGR 的 ADCPRE[1:0]设置。PCLK2=72M。
数字时钟:RCC_APB2ENR,用于访问寄存器
采样时间:ADC 需要若干个 ADC_CLK 周期完成对输入的模拟量进行采样,采样的周期数可通过ADC 采样时间寄存器 ADC_SMPR1 和 ADC_SMPR2 中的 SMPx[2:0]位设置, ADC_SMPR2控制的是通道 0~9, ADC_SMPR1 控制的是通道 10~17。每个通道可以分别用不同的时间采样。其中采样周期最小是 1.5 个,即如果我们要达到最快的采样,那么应该设置采样周期为 31.5个周期,这里说的周期就是 1/ADC_CLK。
最短的转换时间:Tconv = 采样时间 + 12.5 个周期
PCLK2 = 72M,ADC_CLK = 72/6 = 12M
Tconv = 1.5+12.5 = 14周期 = 14/12us=1.17us
2.6 数据寄存器
一切准备就绪后, ADC 转换后的数据根据转换组的不同,规则组的数据放在ADC_DR 寄存器,注入组的数据放在 JDRx。
2.6.1 规则数据寄存器
????ADC 规则组数据寄存器ADC_DR 只有一个,是一个32 位的寄存器,低16 位在单ADC
时使用,高16 位是在ADC1 中双模式下保存ADC2 转换的规则数据,双模式就是ADC1 和
ADC2 同时使用。在单模式下,ADC1/2/3 都不使用高16 位。因为ADC 的精度是12 位,无
论ADC_DR 的高16 或者低16 位都放不满,只能左对齐或者右对齐,具体是以哪一种方式
存放,由ADC_CR2 的11 位ALIGN 设置。
????????规则通道可以有16 个这么多,可规则数据寄存器只有一个,如果使用多通道转换,那
转换的数据就全部都挤在了DR 里面,前一个时间点转换的通道数据,就会被下一个时间
点的另外一个通道转换的数据覆盖掉,所以当通道转换完成后就应该把数据取走,或者开
启DMA 模式,把数据传输到内存里面,不然就会造成数据的覆盖。最常用的做法就是开
启DMA 传输。
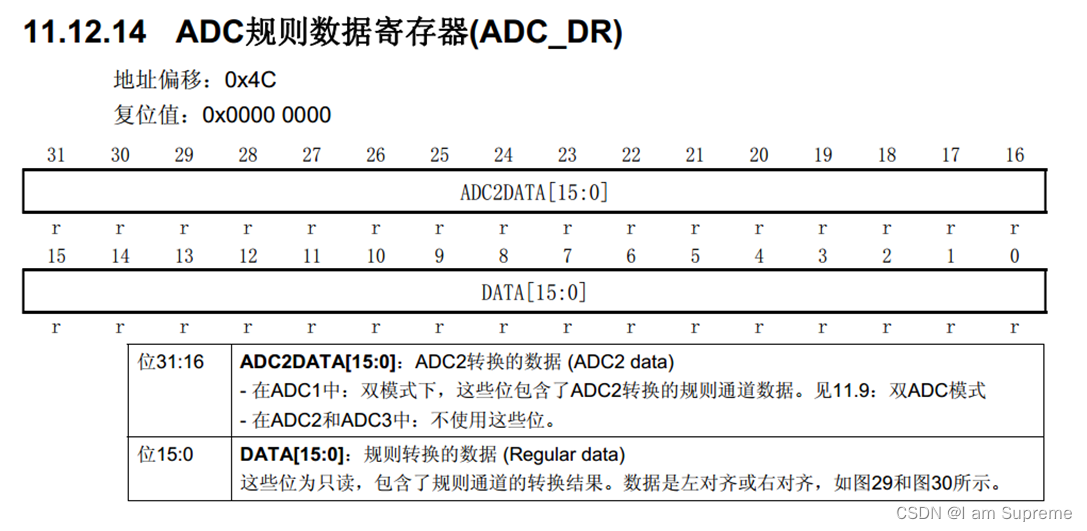
1-16位有效,用于存放独立模式转换完成数据?
2- ADC_CR2 :ALIGN
3-只有一个,多通道采集的是最好使用DMA
2.6.2 注入数据寄存器
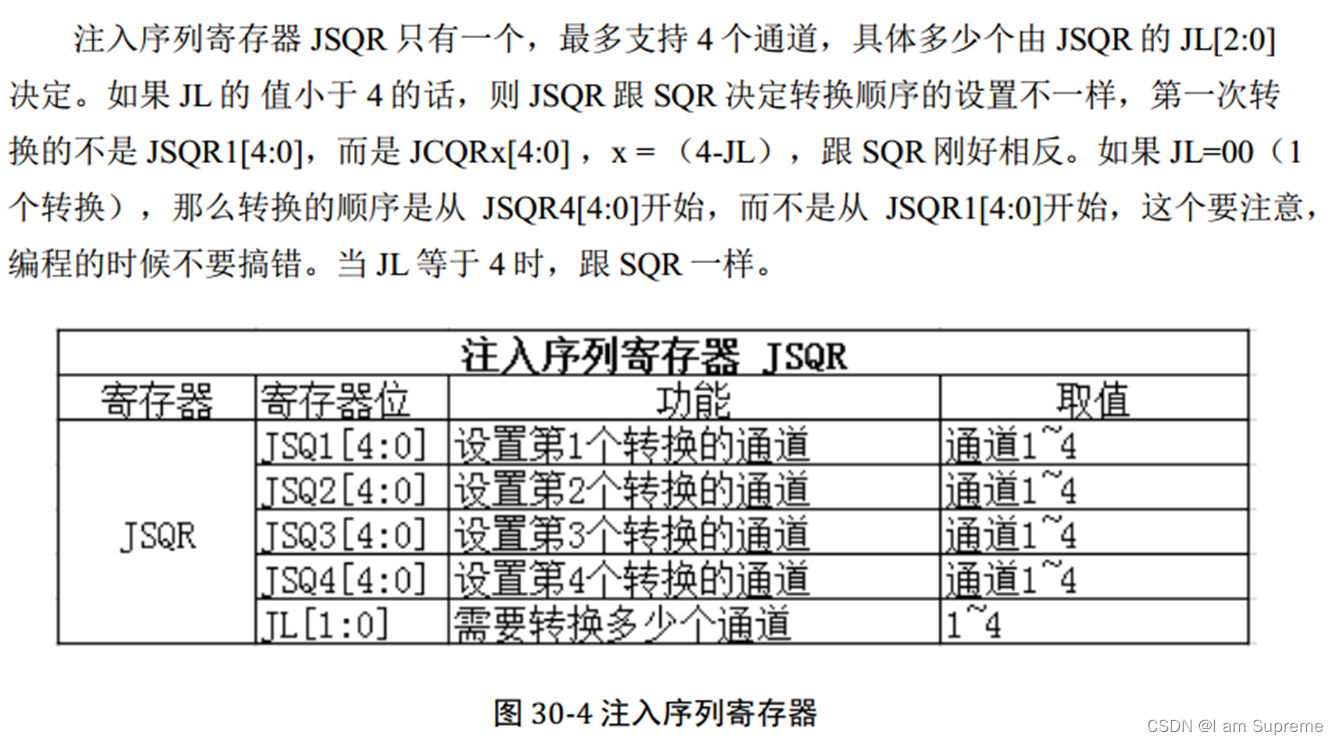
????????ADC 注入组最多有4 个通道,刚好注入数据寄存器也有4 个,每个通道对应着自己的
寄存器,不会跟规则寄存器那样产生数据覆盖的问题。ADC_JDRx 是32 位的,低16 位有
效,高16 位保留,数据同样分为左对齐和右对齐,具体是以哪一种方式存放,由
ADC_CR2 的11 位ALIGN 设置。

1-16位有效,用于存放注入通道转换完成数据
2- ADC_CR2 :ALIGN
3-有4个这样的寄存器
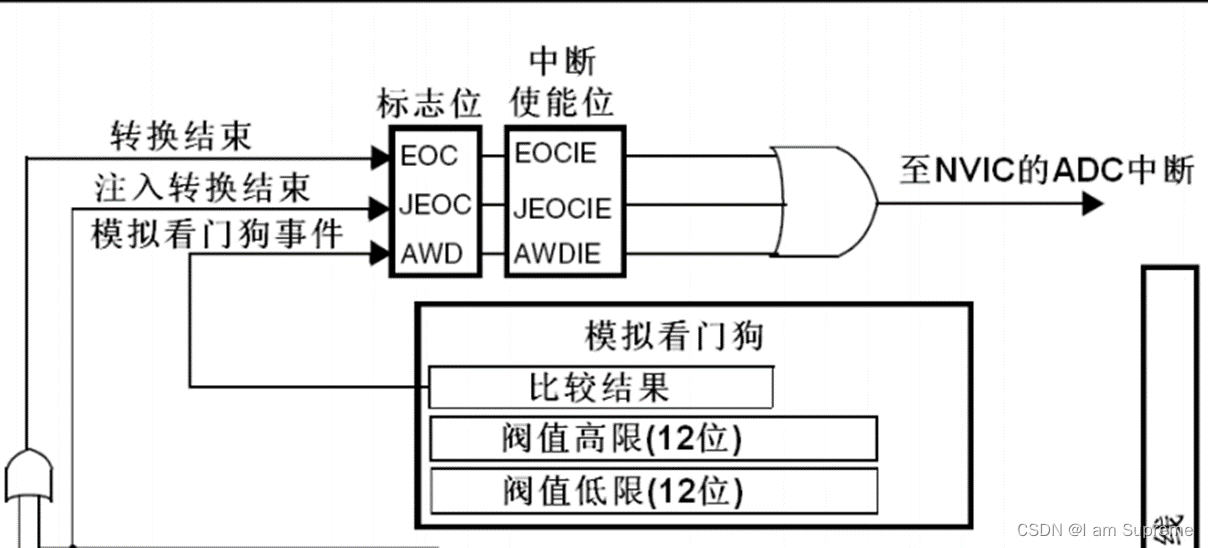
2.7?中断
2.7.1 转换结束中断
????????数据转换结束后,可以产生中断,中断分为三种:规则通道转换结束中断,注入转换通道转换结束中断,模拟看门狗中断。其中转换结束中断很好理解,跟我们平时接触的中断一样,有相应的中断标志位和中断使能位,我们还可以根据中断类型写相应配套的中断服务程序。
2.7.2 模拟看门狗中断
????????当被ADC 转换的模拟电压低于低阈值或者高于高阈值时,就会产生中断,前提是我们开启了模拟看门狗中断,其中低阈值和高阈值由ADC_LTR 和ADC_HTR 设置。例如我们设置高阈值是2.5V,那么模拟电压超过2.5V 的时候,就会产生模拟看门狗中断,反之低阈值也一样。
2.7.3 DMA 请求
????????规则和注入通道转换结束后,除了产生中断外,还可以产生DMA 请求,把转换好的
数据直接存储在内存里面。要注意的是只有ADC1 和ADC3 可以产生DMA 请求。有关
DMA请求需要配合《STM32F10X-中文参考手册》DMA控制器这一章节来学习。一般我们
在使用ADC 的时候都会开启DMA 传输。
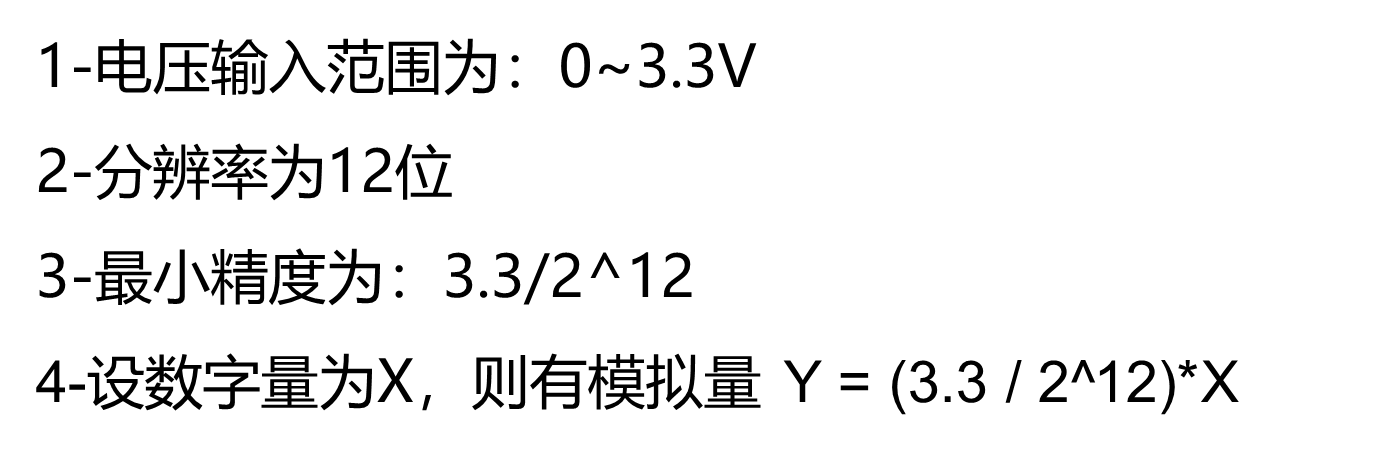
?那么,怎么根据数据量算出模拟量?
????????模拟电压经过ADC 转换后,是一个12 位的数字值,如果通过串口以16 进制打印出来的话,可读性比较差,那么有时候我们就需要把数字电压转换成模拟电压,也可以跟实际的模拟电压(用万用表测)对比,看看转换是否准确。
????????我们一般在设计原理图的时候会把ADC 的输入电压范围设定在:0~3.3v,因为ADC是12 位的,那么12 位满量程对应的就是3.3V,12 位满量程对应的数字值是:2^12。数值0 对应的就是0V。如果转换后的数值为 X ,X 对应的模拟电压为Y,那么会有这么一个等式成立: 2^12 / 3.3 = X / Y,=> Y = (3.3 * X ) / 2^12。
三、ADC初始化结构体讲解
????????标准库函数对每个外设都建立了一个初始化结构体xxx_InitTypeDef(xxx 为外设名称),结构体成员用于设置外设工作参数,并由标准库函数xxx_Init()调用这些设定参数进入设置外设相应的寄存器,达到配置外设工作环境的目的。
????????结构体xxx_InitTypeDef 和库函数xxx_Init 配合使用是标准库精髓所在,理解了结构体
xxx_InitTypeDef 每个成员意义基本上就可以对该外设运用自如了。结构体xxx_InitTypeDef定义在stm32f10x_xxx.h 文件中,库函数xxx_Init 定义在stm32f10x_xxx.c 文件中,编程时我们可以结合这两个文件内注释使用。
ADC_InitTypeDef 结构体
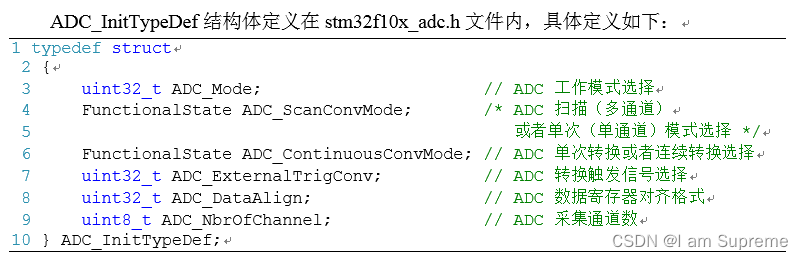
ADC_Mode:配置ADC 的模式,当使用一个ADC 时是独立模式,使用两个ADC 时是
双模式,在双模式下还有很多细分模式可选,具体配置ADC_CR1:DUALMOD 位。
ScanConvMode:可选参数为ENABLE 和DISABLE,配置是否使用扫描。如果是单通
道AD 转换使用DISABLE , 如果是多通道AD 转换使用ENABLE , 具体配置
ADC_CR1:SCAN 位。
ADC_ContinuousConvMode:可选参数为ENABLE 和DISABLE,配置是启动自动连续
转换还是单次转换。使用ENABLE 配置为使能自动连续转换;使用DISABLE 配置为单次
转换,转换一次后停止需要手动控制才重新启动转换,具体配置ADC_CR2:CON 位。
ADC_ExternalTrigConv:外部触发选择,上文中断章节 列举了很多外部触发条件,可根据
项目需求配置触发来源。实际上,我们一般使用软件自动触发。
ADC_DataAlign:转换结果数据对齐模式,可选右对齐ADC_DataAlign_Right或者左对
齐ADC_DataAlign_Left。一般我们选择右对齐模式。
ADC_NbrOfChannel:AD 转换通道数目,根据实际设置即可。具体的通道数和通道的
转换顺序是配置规则序列或注入序列寄存器。
几个常用的固件库函数讲解
- ADC_Init();??? 429? ? ? ? ? ? ?
- RCC_ADCCLKConfig();??? 680? ? ? ? ? ? ? ? ? ? ?? //该函数配置ADC clock的分频
- ADC_RegularChannelConfig();??? 442? ? ? ? ? ? ?//配置通道的转换顺序
- ADC_Cmd();???? 431? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ??
- ADC_SoftwareStartConvCmd();??? 438? ? ? ? ?//软件触发
- ADC_ExternalTrigConvCmd();??? 443? ? ? ? ? ? //外部触发
- ADC_DMACmd();??? 432? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? //采集并转换完数据之后,要不要启动DMA把? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 数据存储到其他地方
四、模数转换器相关代码讲解
????????STM32 的ADC 功能繁多,我们设计三个实验尽量完整的展示ADC 的功能。首先是比
较基础实用的单通道采集,实现开发板上电位器电压的采集,并通过串口打印至PC端串口
调试助手。单通道采集适用AD 转换完成中断,在中断服务函数中读取数据,不使用DMA
传输,在多通道采集时才使用DMA 传输。
4.1?硬件设计
霸道ADC接口
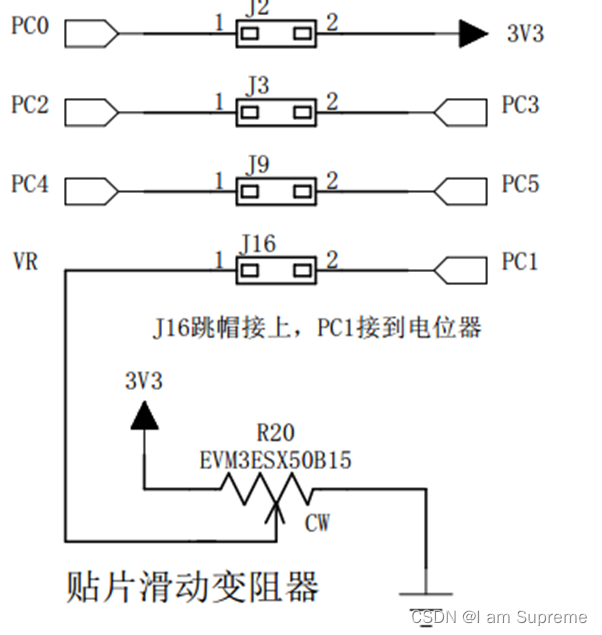
????????贴片滑动变阻器的动触点通过连接至STM32 芯片的ADC 通道引脚。当我们旋转滑动变阻器调节旋钮时,其动触点电压也会随之改变,电压变化范围为0~3.3V,亦是开发板默认的ADC 电压采集范围。
4.2?软件设计
- -独立模式-单通道-中断读取
- -独立模式-单通道-DMA读取
- -独立模式-多通道-DMA读取
- -双重模式-多通道-规则同步
?4.2.1?-独立模式-单通道-中断读取
编程要点
- 初始化ADC用到的GPIO
- 初始化ADC初始化结构体
- 配置ADC时钟,配置通道的转换顺序和采样时间
- 使能ADC转换完成中断,配置中断优先级
- 使能ADC,准备开始转换
- 校准ADC
- 软件触发ADC,真正开始转换
- 编写中断服务函数,读取ADC转换数据
- 编写main函数,把转换的数据打印出来
?bsp_adc.h
#ifndef __ADC_H
#define __ADC_H
#include "stm32f10x.h"
// ADC 编号选择
// 可以是 ADC1/2,如果使用ADC3,中断相关的要改成ADC3的
#define ADC_APBxClock_FUN RCC_APB2PeriphClockCmd
#define ADCx ADC2
#define ADC_CLK RCC_APB2Periph_ADC2
// ADC GPIO宏定义
// 注意:用作ADC采集的IO必须没有复用,否则采集电压会有影响
#define ADC_GPIO_APBxClock_FUN RCC_APB2PeriphClockCmd
#define ADC_GPIO_CLK RCC_APB2Periph_GPIOC
#define ADC_PORT GPIOC
#define ADC_PIN GPIO_Pin_1
// ADC 通道宏定义
#define ADC_CHANNEL ADC_Channel_11
// ADC 中断相关宏定义
#define ADC_IRQ ADC1_2_IRQn
#define ADC_IRQHandler ADC1_2_IRQHandler
//#define ADC_IRQ ADC3_IRQn
//#define ADC_IRQHandler ADC3_IRQHandler
void ADCx_Init(void);
#endif /* __ADC_H */
bsp_adc.c
#include"bsp_adc.h"
static void ADCx_GPIO_Config(void )
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_GPIO_APBxClock_FUN(ADC_GPIO_CLK,ENABLE);
// 配置 ADC IO 引脚模式
// 必须为模拟输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = ADC_PIN;
// 初始化 ADC IO
GPIO_Init(ADC_PORT, &GPIO_InitStructure);
}
static void ADCx_Mode_Config(void )
{
ADC_InitTypeDef ADC_InitStructure;
// 打开ADC时钟
ADC_APBxClock_FUN(ADC_CLK,ENABLE);
// ADC 模式配置
// 只使用一个ADC,属于独立模式
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
// 禁止扫描模式,多通道才要,单通道不需要
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
连续转换模式
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
// 不用外部触发转换,软件开启即可
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
// 转换结果右对齐
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
// 转换通道1个
ADC_InitStructure.ADC_NbrOfChannel = 1;
// 初始化ADC
ADC_Init(ADC_x,&ADC_InitStructure);
//配置ADC时钟
RCC_ADCCLKConfig(RCC_PCLK2_Div8);
//配置通道的转换顺序和采样时间
ADC_RegularChannelConfig(ADC_x,ADC_CHANNEL,1,ADC_SampleTime_55Cycles5);
//4、使能ADC转换完成中断,配置中断优先级
ADC_ITConfig(ADC_x, ADC_IT_EOC, ENABLE);
//5、使能ADC,准备开始转换
ADC_Cmd(ADC_x, ENABLE);
// 初始化ADC 校准寄存器
ADC_ResetCalibration(ADC_x);
// 等待校准寄存器初始化完成
while(ADC_GetResetCalibrationStatus(ADC_x));
//6、校准ADC
// ADC开始校准
ADC_StartCalibration(ADC_x);
// 等待校准完成
while(ADC_GetCalibrationStatus(ADC_x));
//软件触发ADC,真正开始转换
ADC_SoftwareStartConvCmd(ADC_x, ENABLE);
}
static void ADC_NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
//优先级分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
//配置中断优先级
NVIC_InitStructure.NVIC_IRQChannel = ADC_IRQ;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
}
void ADCx_Init(void)
{
ADC_NVIC_Config();
ADCx_GPIO_Config();
ADCx_Mode_Config();
}
stm32f10x_it.c
/**
******************************************************************************
* @file Project/STM32F10x_StdPeriph_Template/stm32f10x_it.c
* @author MCD Application Team
* @version V3.5.0
* @date 08-April-2011
* @brief Main Interrupt Service Routines.
* This file provides template for all exceptions handler and
* peripherals interrupt service routine.
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTI
AL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x_it.h"
#include "bsp_adc.h"
extern __IO uint16_t ADC_ConvertedValue;
/** @addtogroup STM32F10x_StdPeriph_Template
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/******************************************************************************/
/* Cortex-M3 Processor Exceptions Handlers */
/******************************************************************************/
/**
* @brief This function handles NMI exception.
* @param None
* @retval None
*/
void NMI_Handler(void)
{
}
/**
* @brief This function handles Hard Fault exception.
* @param None
* @retval None
*/
void HardFault_Handler(void)
{
/* Go to infinite loop when Hard Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Memory Manage exception.
* @param None
* @retval None
*/
void MemManage_Handler(void)
{
/* Go to infinite loop when Memory Manage exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Bus Fault exception.
* @param None
* @retval None
*/
void BusFault_Handler(void)
{
/* Go to infinite loop when Bus Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Usage Fault exception.
* @param None
* @retval None
*/
void UsageFault_Handler(void)
{
/* Go to infinite loop when Usage Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles SVCall exception.
* @param None
* @retval None
*/
void SVC_Handler(void)
{
}
/**
* @brief This function handles Debug Monitor exception.
* @param None
* @retval None
*/
void DebugMon_Handler(void)
{
}
/**
* @brief This function handles PendSVC exception.
* @param None
* @retval None
*/
void PendSV_Handler(void)
{
}
/**
* @brief This function handles SysTick Handler.
* @param None
* @retval None
*/
void SysTick_Handler(void)
{
}
void ADC_IRQHandler(void)
{
if (ADC_GetITStatus(ADCx,ADC_IT_EOC)==SET)
{
// 读取ADC的转换值
ADC_ConvertedValue = ADC_GetConversionValue(ADCx);
}
ADC_ClearITPendingBit(ADCx,ADC_IT_EOC);
}
/******************************************************************************/
/* STM32F10x Peripherals Interrupt Handlers */
/* Add here the Interrupt Handler for the used peripheral(s) (PPP), for the */
/* available peripheral interrupt handler's name please refer to the startup */
/* file (startup_stm32f10x_xx.s). */
/******************************************************************************/
/**
* @brief This function handles PPP interrupt request.
* @param None
* @retval None
*/
/*void PPP_IRQHandler(void)
{
}*/
/**
* @}
*/
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
main.c
// ADC 单通道采集,不使用DMA,一般只有ADC2才这样使用,因为ADC2不能使用DMA
#include "stm32f10x.h"
#include "bsp_usart.h"
#include "bsp_adc.h"
extern __IO uint16_t ADC_ConvertedValue;
// 局部变量,用于保存转换计算后的电压值
float ADC_ConvertedValueLocal;
// 软件延时
void Delay(__IO uint32_t nCount)
{
for(; nCount != 0; nCount--);
}
/**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{
// 配置串口
USART_Config();
// ADC 初始化
ADCx_Init();
printf("\r\n ----这是一个ADC单通道中断读取实验----\r\n");
while (1)
{
ADC_ConvertedValueLocal =(float) ADC_ConvertedValue/4096*3.3;
printf("\r\n The current AD value = 0x%04X \r\n",
ADC_ConvertedValue);
printf("\r\n The current AD value = %f V \r\n",
ADC_ConvertedValueLocal);
printf("\r\n\r\n");
Delay(0xffffee);
}
}
/*********************************************END OF FILE**********************/
4.2.2-独立模式-单通道-DMA读取
优点:快? ?不需要写中断服务函数? 当数据又多又快的时候使用这个
- 初始化ADC用到的GPIO
- 初始化ADC、DMA初始化结构体
- 配置ADC时钟,配置通道的转换顺序和采样事件
- 编写main函数
此处仅提供bsp_adc.c,
#include"bsp_adc.h"
__IO uint16_t ADC_ConveredValue;
static void ADCx_GPIO_Config(void )
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_GPIO_APBxClock_FUN(ADC_GPIO_CLK,ENABLE);
// 配置 ADC IO 引脚模式
// 必须为模拟输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = ADC_PIN;
// 初始化 ADC IO
GPIO_Init(ADC_PORT, &GPIO_InitStructure);
}
static void ADCx_Mode_Config(void )
{
ADC_InitTypeDef ADC_InitStructure;
DMA_InitTypeDef DMA_InitStructure;
ADC_APBxClock_FUN(ADC_CLK,ENABLE);
//打开DMA时钟
DMA_AHBxClock_FUN(DMA_CLK,ENABLE);
DMA_InitStructure.DMA_PeripheralBaseAddr = ( uint32_t ) ( & ( ADC_x->DR ) );
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)&ADC_ConveredValue;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_BufferSize = 1;//一个通道
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Disable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;//16位
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA_CHANNEL, &DMA_InitStructure);
DMA_Cmd(DMA_CHANNEL , ENABLE);
// ADC 模式配置
// 只使用一个ADC,属于独立模式
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
// 禁止扫描模式,多通道才要,单通道不需要
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
连续转换模式
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
// 不用外部触发转换,软件开启即可
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
// 转换结果右对齐
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
// 转换通道1个
ADC_InitStructure.ADC_NbrOfChannel = 1;
// 初始化ADC
ADC_Init(ADC_x,&ADC_InitStructure);
//配置ADC时钟
RCC_ADCCLKConfig(RCC_PCLK2_Div8);
//配置通道的转换顺序和采样时间
ADC_RegularChannelConfig(ADC_x,ADC_CHANNEL,1,ADC_SampleTime_55Cycles5);
//使能ADC DMA请求
ADC_DMACmd(ADC_x,ENABLE);
//5、使能ADC,准备开始转换
ADC_Cmd(ADC_x, ENABLE);
//6、校准ADC
// ADC开始校准
ADC_StartCalibration(ADC_x);
// 等待校准完成
while(ADC_GetCalibrationStatus(ADC_x));
//软件触发ADC,真正开始转换
ADC_SoftwareStartConvCmd(ADC_x, ENABLE);
}
void ADCx_Init(void)
{
ADCx_GPIO_Config();
ADCx_Mode_Config();
}
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!