机器学习笔记三——强化学习的V值计算
发布时间:2024年01月03日
一、蒙特卡诺采样回溯计算V值
????????把智能体放入环境的任意状态——从这个状态开始按照策略进行动作选择,并进入新状态——重复步骤2,直至进入最终状态——从最终状态往前回溯,计算每个状态的G值——重复1~4状态多次,平均每个状态的G值,这就是所需的V值
? ? ? ? 1.具体G值计算如下:
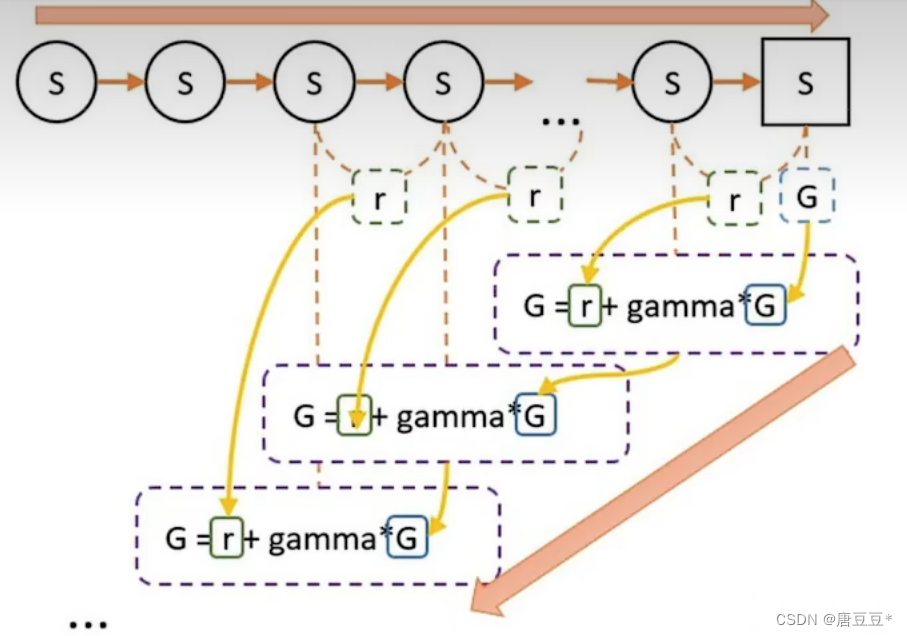
? ? ? ? 按照策略往后走,过程中不进行计算,只记录每一步的奖惩r
? ? ? ? 从终点往前走,到某一状态获得的奖励总和就是G值。此时G=r+gamma*G_1,即这一步的G值等于奖惩r加上上一步的G值(G_1)乘以一定的折扣率(小于1)。这个折扣率是因为认为未来的奖惩对当前的影响与现在的奖惩不等价。
????????2.G值与V值得关系
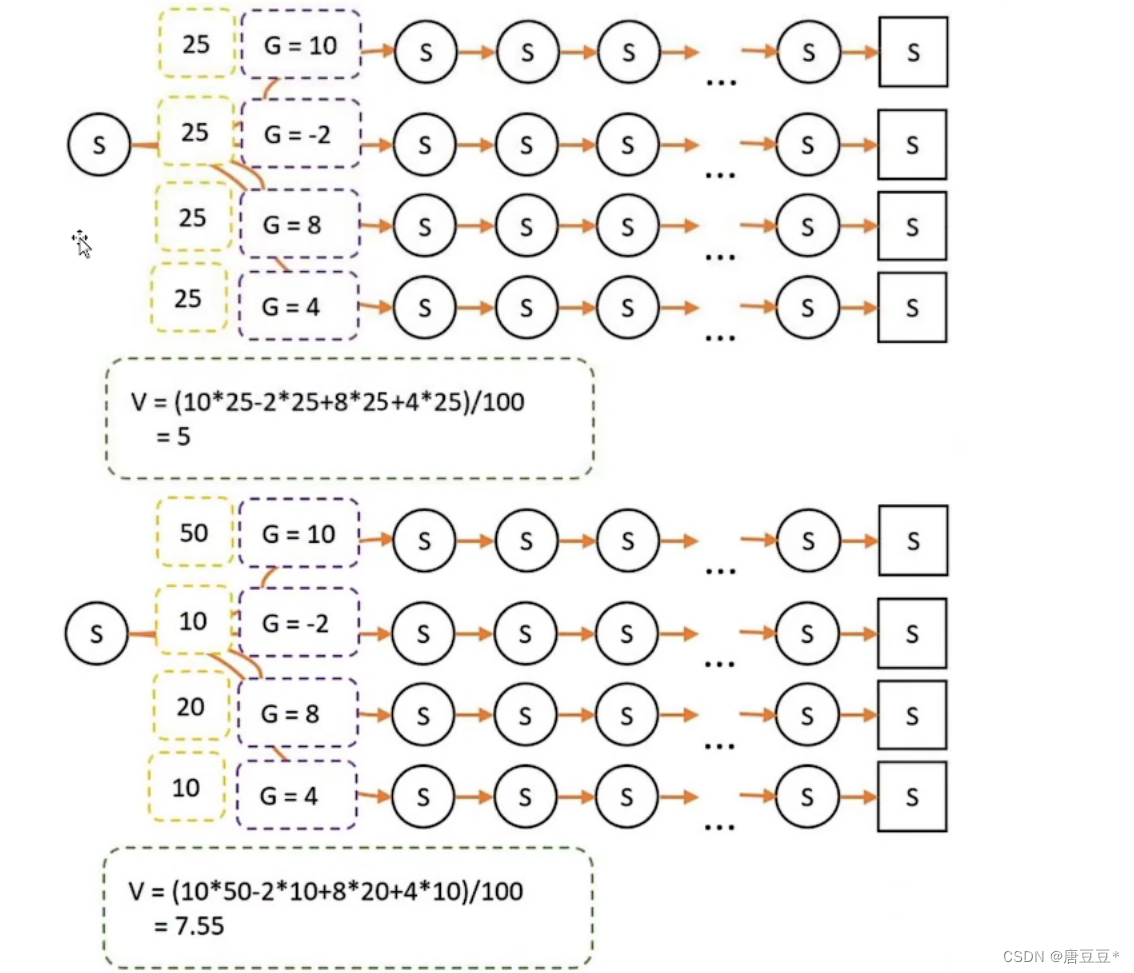
每一个状态往后会有多条轨迹,走到状态终点。从终点往前回溯可以得到多个不同得G值,而V值是正是这个G值得平均值。但个状态对应的轨迹由于策略不同,选择的权重就不同,所以实际计算V值得时候需要将相应轨迹得G值乘以对应得权重。
此方法:每一次都需要从前走到尾,再从后往前追溯,运行时间过长
二、蒙特卡诺和时序差分估算状态V值
1.蒙特卡洛估算状态V值
相当于每回来一个G值,对V值进行一次估算。
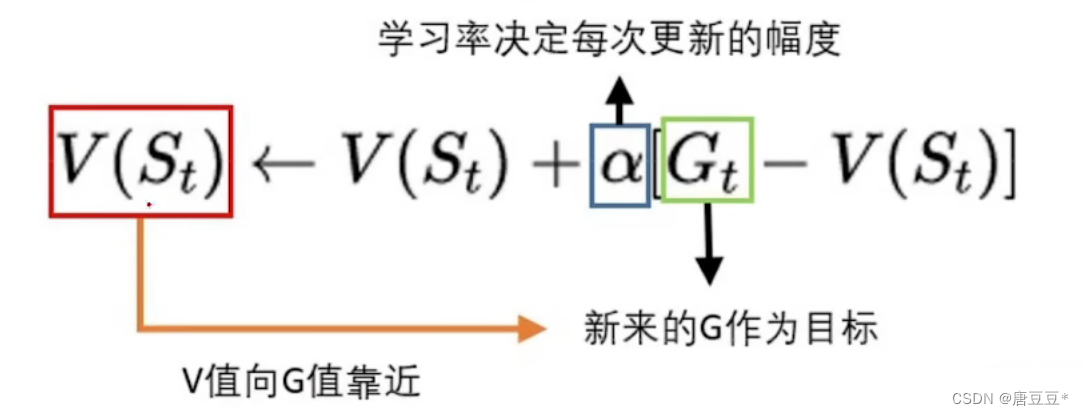
更新法本质:新平均=旧平均+步长*(新加入元素-旧平均)
步长就决定你调节得快慢,有点类似梯度下降法。不断更新拟合,调整次数越多,与实际得V值更接近。
但仍旧存在需要等轨迹跑到状态终点回溯,所以也可能时间较长。
2.时序差分估算状态V值(应用最为广泛)
只需要走N步,就开始回溯。
回溯时有可能有两种可能:
1)第N步的状态之前没有走过,此时认为V_N=0
2)若第N步的状态之前走过,此时认为V_N=V
往前回溯的过程中G=r+gamma*V_N
![]()
这里面的V(St+1)就是V_N
持续更新中~
文章来源:https://blog.csdn.net/doudou2weiwei/article/details/135314423
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 「优选算法刷题」:有效三角形的个数
- frp配置内网穿透访问家里的nas
- Ethercat“配置从站地址”报文分析
- 什么是线程?线程和进程有什么区别?在Java中如何创建线程?你能解释一下Java中的synchronized关键字吗?
- Spring Boot 中批量执行 SQL 脚本的实践
- Spirng Boot整合Mybaatis
- RecombiMAb anti-mouse VEGFR-2
- 详解全志R128 RTOS安全方案功能
- 2020年认证杯SPSSPRO杯数学建模B题(第二阶段)分布式无线广播全过程文档及程序
- 【docker】数据卷和数据卷容器