viple与物理机器人(三):物理机器人两距离局部最优迷宫算法
发布时间:2023年12月21日
????????前提:熟悉两距离局部最优迷宫算法的原理、物理机器人的配置、物理机器人通过机器人驱动器来控制运动。
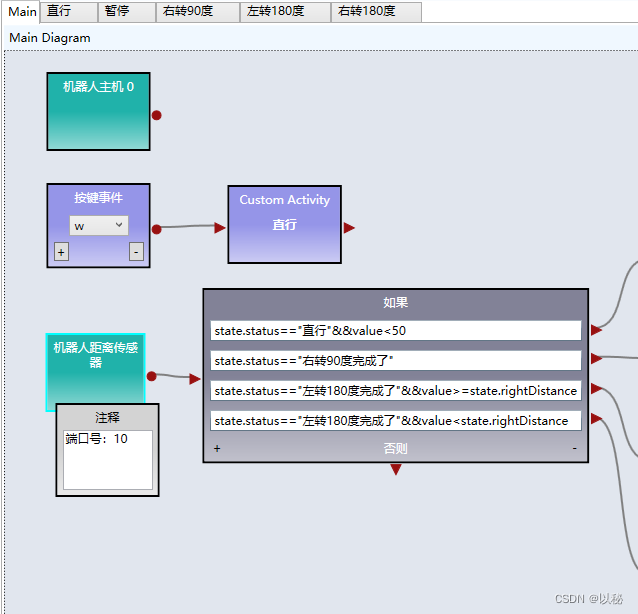
? ? ? ? 首先,编写Web 2D中实现两距离局部最优迷宫算法程序
再对程序作如下修改即可:
1、修改主机配置(模拟器配置改为物理机器人配置)

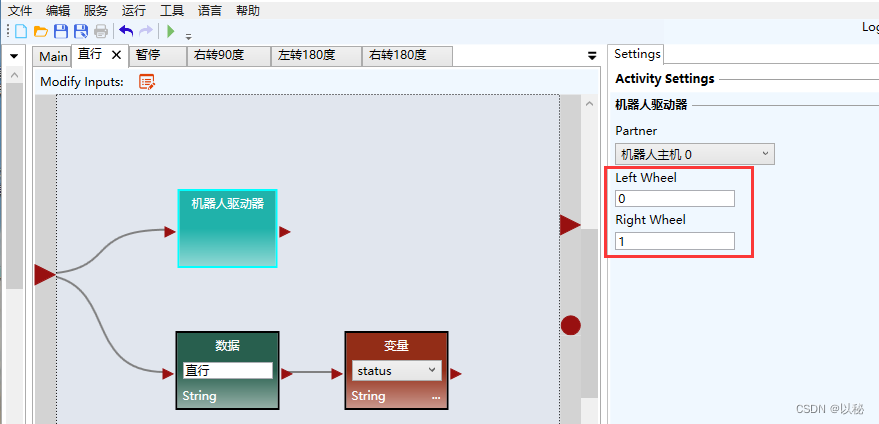
2、程序中所有的驱动器的端口号全部修改为左轮为0,右轮为1
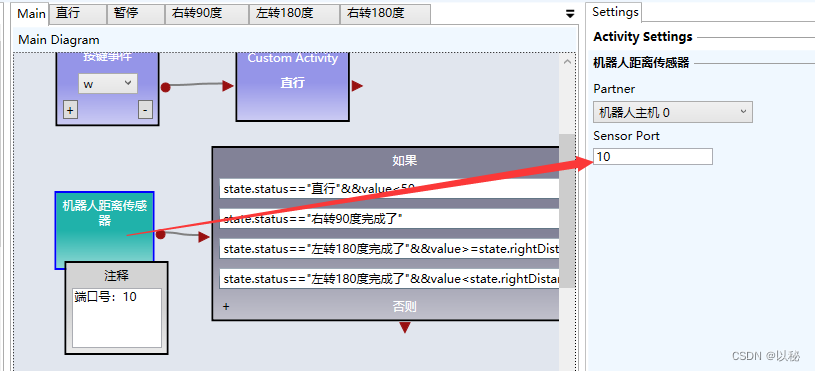
3、距离传感器的端口号配置为10(因为放置在前方)
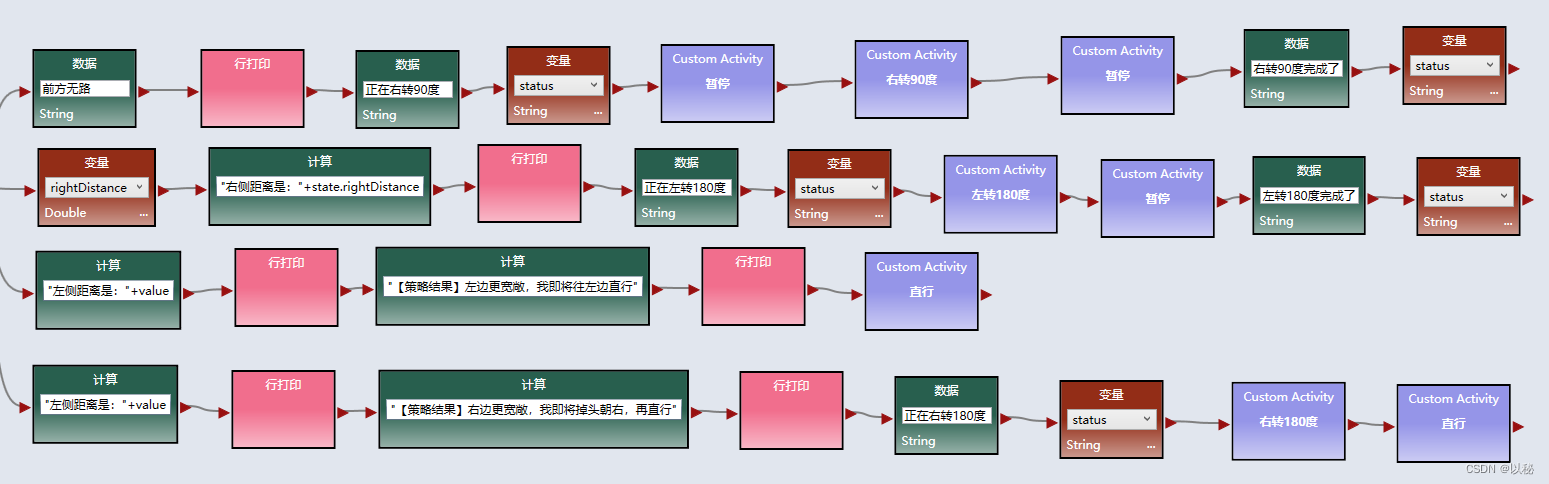
4、搭建迷宫,调整参数,直到运行结果能直观看到:前方无路了,有停止动作,再右转90度,再进行测量,程序中可以看到打印右侧测距结果,然后再左转180度,再停下来,再进行测量,程序中看到打印左侧测距结果,然后再选择往宽敞的那一边运行,即为比较好的运行结果。
参考运行结果:
点击查看结果
文章来源:https://blog.csdn.net/songxiaolingbaobao/article/details/134951512
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 如何压缩照片?分享4种全面的方法!
- 「达摩院MindOpt」优化形状切割问题(MILP)
- Unity 射线检测(Raycast)检测图层(LayerMask)的设置
- MySQL第四次作业
- 用js将geojson转换成WKT格式并插入到数据库
- 【史上最细教程】CentOS7 下载安装 RabbitMQ(两种方式:手动安装 / Docker安装)
- Leetcod面试经典150题刷题记录 —— 滑动窗口篇
- Axure中继器案例:中继器的repeater属性,中继器的Item属性
- excel vba实现连锁门店2024年促销计划Excel表格模板
- UE蓝图 RPG动作游戏(一) day15