dpdk20.11.9 编译arm版本以及在arm 应用中引用dpdk20.11.9
以往19版本的dpdk?都是可以直接用make?的方式进行编译, e.g,
make T=x86_64-native-linux-gcc install
为了和客户那边用的DPDK?版本一致,?这次要用dpdk20.11.9,?并且要把之前跑在X86?版本的服务器上的程序跑在ARM?版本上.
目前有两个问题:
1.?编译出arm?版本的dpdk.
2.?把编译出来的dpdk lib?引用到arm版本的 testArmApp中.
-------------------------------------------------------------
1.?编译出arm?版本的dpdk.
1).?下载源码:
dpdk.or -> core ->download -> 选择20.11.9 下载:
dpdk-20.11.9.tar.xz
2). 从dpdk.org中搜索相关的步骤可以得到以下信息:
4. Cross compiling DPDK for aarch64 and aarch32 — Data Plane Development Kit 23.11.0 documentation
前边的步骤,?官网写得很清楚了,?最后两个步骤的关键步骤说一下:
# 这一步是准备一些编译相关的配置. meson setup aarch64-build-gcc --cross-file config/arm/arm64_armv8_linux_gcc # 这里是按之前生成的配置文件正式编译 ninja -C aarch64-build-gcc
3).?以前步骤很快就把dpdk?编译出来了.
4.).?把dpdk?引用到testArmApp?中.?
这个时候发现dpdk 20中的makefile变了, "include $(RTE_SDK)/mk/rte.extapp.mk"? 这些语句没有了.?加上也会报错.?这行的意思就是初始化一些dpdk的lib?依赖,?以及确定gcc?版本,?Ld?版本等.
那么在makefile中就要手动加入Lib的引用了.?
开始使用的全是-lrte_eal ...?这种参数来编译的,?也编译成功了.?不过testArmApp在服务器上跑的时候发现.so?文件(动态链接库)找不到.
所以把所有dpdk?lib?相关的都改成了 .a的形式,?如下所示:
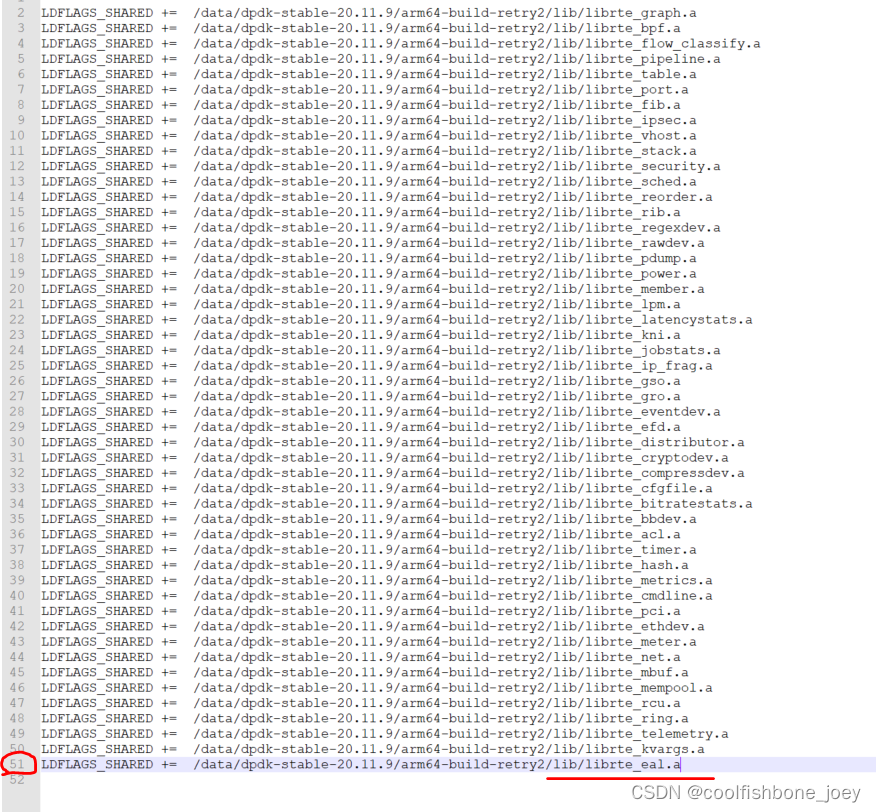
我们先注意一下51?行这里,有问题,?后边再说.
按以上新的.a?的依赖方式,?发现编译到最后的时候,?始终有两个函数找不到定义:
dpdk-stable-20.11.9/arm64-build-retry2/lib/librte_eal.a(librte_eal_common_eal_common_options.c.o): In function `handle_eal_info_request':
eal_common_options.c:(.text+0x34): undefined reference to `rte_tel_data_start_array'
eal_common_options.c:(.text+0x54): undefined reference to `rte_tel_data_add_array_string'
/data/yubo/dpdk-stable-20.11.9/arm64-build-retry2/lib/librte_eal.a(librte_eal_common_eal_common_options.c.o): In function `eal_save_args':
eal_common_options.c:(.text+0x90c): undefined reference to `rte_telemetry_register_cmd'
eal_common_options.c:(.text+0x924): undefined reference to `rte_telemetry_register_cmd'
/data/yubo/dpdk-stable-20.11.9/arm64-build-retry2/lib/librte_eal.a(librte_eal_linux_eal.c.o): In function `rte_eal_init':
eal.c:(.text+0x1e48): undefined reference to `rte_telemetry_init'
/data/yubo/dpdk-stable-20.11.9/arm64-build-retry2/lib/librte_eal.a(librte_eal_common_eal_common_devargs.c.o): In function `rte_devargs_layers_parse':
eal_common_devargs.c:(.text+0x2e8): undefined reference to `rte_kvargs_parse_delim'
eal_common_devargs.c:(.text+0x34c): undefined reference to `rte_kvargs_free'
再三确认了代码和函数,?用arch -t?查看相关的.a?文件也发现定义的,?但是还是在Link这一步会出问题.
最后才发现.?比如A.a?中调用了B.a?那,?依赖时, A.a?要放到前边,?所以.a的依赖顺序改成以下:
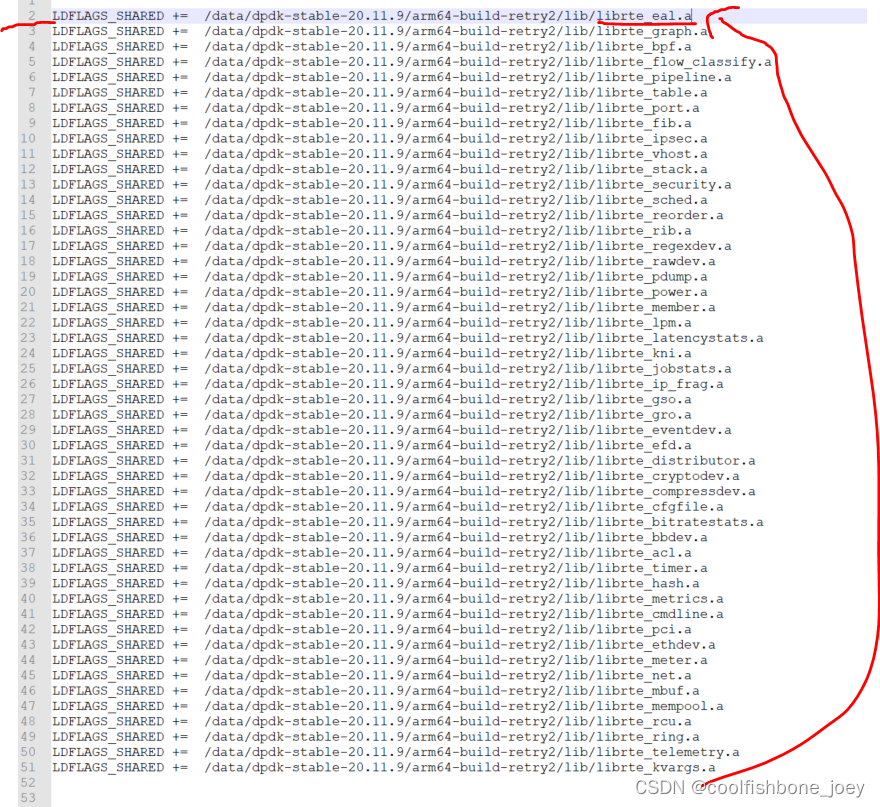
lib?引用没有问题了,?又报了以下问题:
/data//dpdk-stable-20.11.9/arm64-build/lib/librte_eal.a(librte_eal_common_eal_common_log.c.o): In function `rte_log_get_stream':
eal_common_log.c:(.text+0x20): relocation truncated to fit: R_AARCH64_ADR_PREL_PG_HI21 against `.bss'
/data//dpdk-stable-20.11.9/arm64-build/lib/librte_eal.a(librte_eal_common_eal_common_log.c.o): In function `eal_log_set_default':
eal_common_log.c:(.text+0x800): relocation truncated to fit: R_AARCH64_ADR_PREL_PG_HI21 against `.bss'
/data//dpdk-stable-20.11.9/arm64-build/lib/librte_eal.a(librte_eal_linux_eal_interrupts.c.o): In function `eal_intr_thread_main':
eal_interrupts.c:(.text+0x23c): relocation truncated to fit: R_AARCH64_ADR_PREL_PG_HI21 against `.bss'
/data//dpdk-stable-20.11.9/arm64-build/lib/librte_eal.a(librte_eal_linux_eal_interrupts.c.o): In function `rte_intr_callback_register':
eal_interrupts.c:(.text+0x8ac): relocation truncated to fit: R_AARCH64_ADR_PREL_PG_HI21 against `.bss'
/data//dpdk-stable-20.11.9/arm64-build/lib/librte_eal.a(librte_eal_linux_eal_interrupts.c.o): In function `rte_intr_callback_unregister':
eal_interrupts.c:(.text+0xb98): relocation truncated to fit: R_AARCH64_ADR_PREL_PG_HI21 against `.bss'
/data//dpdk-stable-20.11.9/arm64-build/lib/librte_eal.a(librte_eal_linux_eal_interrupts.c.o): In function `rte_eal_intr_init':
eal_interrupts.c:(.text+0x1684): relocation truncated to fit: R_AARCH64_ADR_PREL_PG_HI21 against `.bss'
/data//dpdk-stable-20.11.9/arm64-build/lib/librte_eal.a(librte_eal_linux_eal_interrupts.c.o): In function `rte_thread_is_intr':
eal_interrupts.c:(.text.experimental+0x4): relocation truncated to fit: R_AARCH64_ADR_PREL_PG_HI21 against `.bss'
/data//dpdk-stable-20.11.9/arm64-build/lib/librte_eal.a(librte_eal_linux_eal_interrupts.c.o): In function `rte_intr_callback_unregister_pending':
eal_interrupts.c:(.text.experimental+0x38): relocation truncated to fit: R_AARCH64_ADR_PREL_PG_HI21 against `.bss'
/data//dpdk-stable-20.11.9/arm64-build/lib/librte_eal.a(librte_eal_linux_eal_memalloc.c.o): In function `huge_sigbus_handler':
eal_memalloc.c:(.text+0x4): relocation truncated to fit: R_AARCH64_ADR_PREL_PG_HI21 against `.bss'
/data//dpdk-stable-20.11.9/arm64-build/lib/librte_eal.a(librte_eal_linux_eal_memalloc.c.o): In function `huge_wrap_sigsetjmp':
eal_memalloc.c:(.text+0x1c): relocation truncated to fit: R_AARCH64_ADR_PREL_PG_HI21 against `.bss'
查了很多网页发现是因为testArmApp中定义的数组太大,?和arm?版本默认的栈大小兼容.?需要加上以下参数进行编译:
-fno-PIC mcmodel=lagre
开始尝试在testArmApp?编译的时候加上这两个参数,?编译时发现并不行.
那估计是被引用?的dpdk?Lib?也需要重新编译.?加上这两个参数.?那问题来了, dpdk?的编译都不知道参数哪里配置的.
经过多次尝试发现, dpdk的的编译参数是在以下这一步生成的:
meson setup aarch64-build-gcc --cross-file config/arm/arm64_armv8_linux_gcc
发现相关的编译参数都在文件夹 aarch64-build-gcc中,?经过多次编译发 这个只是一个文件夹名字,?是可以随便取的.? 所以在这个文件夹中,?我找到了相关的配置文件:build.ninja
把这个文件中所有参数:?fPIC 为 fno-pic mcmodel=large
然后再执行:?
ninja -C aarch64-build-gcc
这个时候发现testArmApp?就正常生成了.
arm服务器上测试,?testArmApp? 能正常工作.?
=======================================================
5). 以下是一些解决问题过程的工具记录:
5.1).cd /data/dpdk-stable-20.11.9
meson build
提示要用python3.7 以上.
==>安装 python 3.7:
sudo apt-get install python3.7
From <ubuntu如何安装python3.7.0? - 优草派>
=>?版本确认
python --version是3.8.0
python3 --version 是3.6.9
看来python3?的默认版本不对, 要把phyton3 改成3.8.0
whereis python3? ?找到bin 位置, 然后修改相关链接:
sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.8 1
test@test-accd100012:/data/dpdk-stable-20.11.9$ python3 --version
Python 3.8.0
这样就对了.
=>再重启meson build :
提示没有 ModuleNotFoundError: No module named 'mesonbuild'
===>
安装meson build 相关东西. 按: DPDK 交叉编译基本流程_dpdk交叉编译-CSDN博客? 尝试:
下载交叉编译工具链
====>这一步就下不下来.?? 让IT修改外网配置后,能下载了.
将交叉编译工具的路径加入 PATH环境变量中
$ export PATH=$PATH:/home/zhoumin/gcc-arm-9.2-2019.12-x86_64-aarch64-none-linux-gnu/bin
=>numactl 手动下载:
Releases · numactl/numactl · GitHub?? 2.0.13 的src code.
(wget 下载不了. 只有手动下载)
=>生成配置文件
meson setup arm64-build --cross-file config/arm/arm64_armv8_linux_gcc
这一步报: 'meson==0.52.1' distribution was not found and is required by the application
按:https://blog.csdn.net/a50095949/article/details/127289702? 步骤试下:
sudo apt-get install?python3 python3-pip?ninja-build
pip3 install --user meson==0.52.1
到此,?准备编译dpdk?编译的工具链时遇到的问题就完了.
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- VMware安装win10虚拟机
- java入门之双色球
- 微信小程序“Error: xxx.js 已被代码依赖分析忽略,无法被其他模块引用”报错?
- 保护您的Android应用程序:Android应用程序安全一览
- setuptools编译CUDA代码并调用
- 洛谷 P9868 [NOIP2023] 词典
- Java将PDF转换为文本
- 记录汇川:水塔指令解释-ST
- shell-获取服务器基础信息
- 李沐《动手学深度学习》线性神经网络 softmax回归