ROS分布式框架搭建
发布时间:2024年01月10日
ROS分布式框架搭建
??在ROS机器人分布式框架搭建时,Jetson nano作为主机,而PC作为从机。
1 主机配置
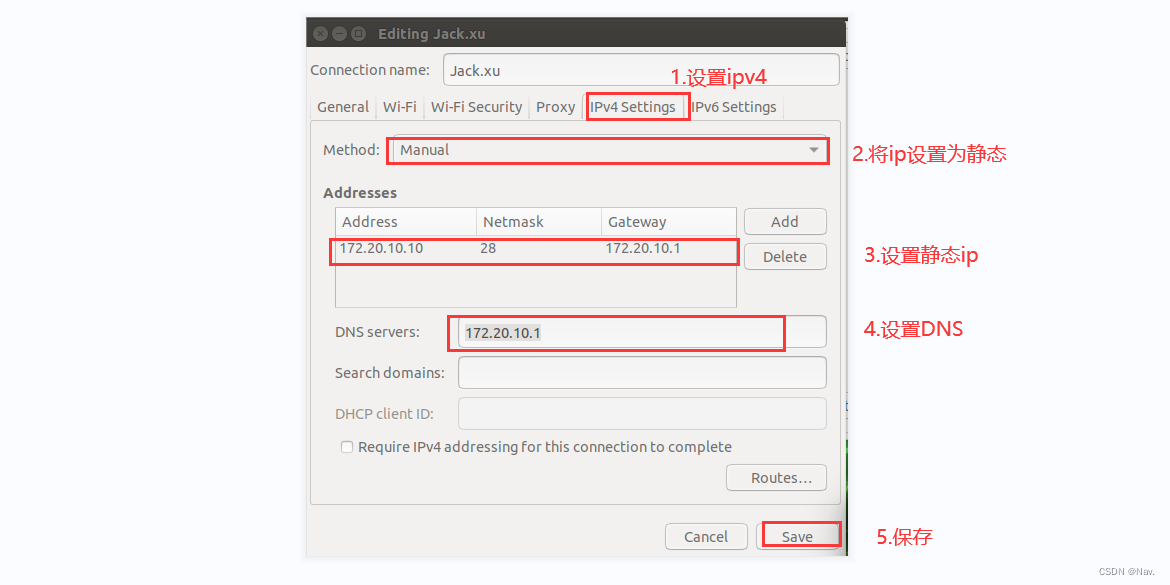
在实现分布式框架搭建前,我们还需要做些准备工作:为Jetson nano连接无线网络,并且设置固定IP,实现如下:
- 为Jetson nano连接无线网络;
- 为Jetson nano配置静态IP,具体操作如图:

2 ROS分布式通信
??ROS是一个分布式计算环境,一个运行中的ROS系统可以包含分布在多台计算机上多个节点。根据系统的配置方式,任何节点可能随时需要与任何其他节点进行通信。因此,ROS对网络配置有某些要求:
- 所有端口上的所有机器之间必须有完整的双向连接。
- 每台计算机必须通过所有其他计算机都可以解析的名称来公告自己。
2.1 准备
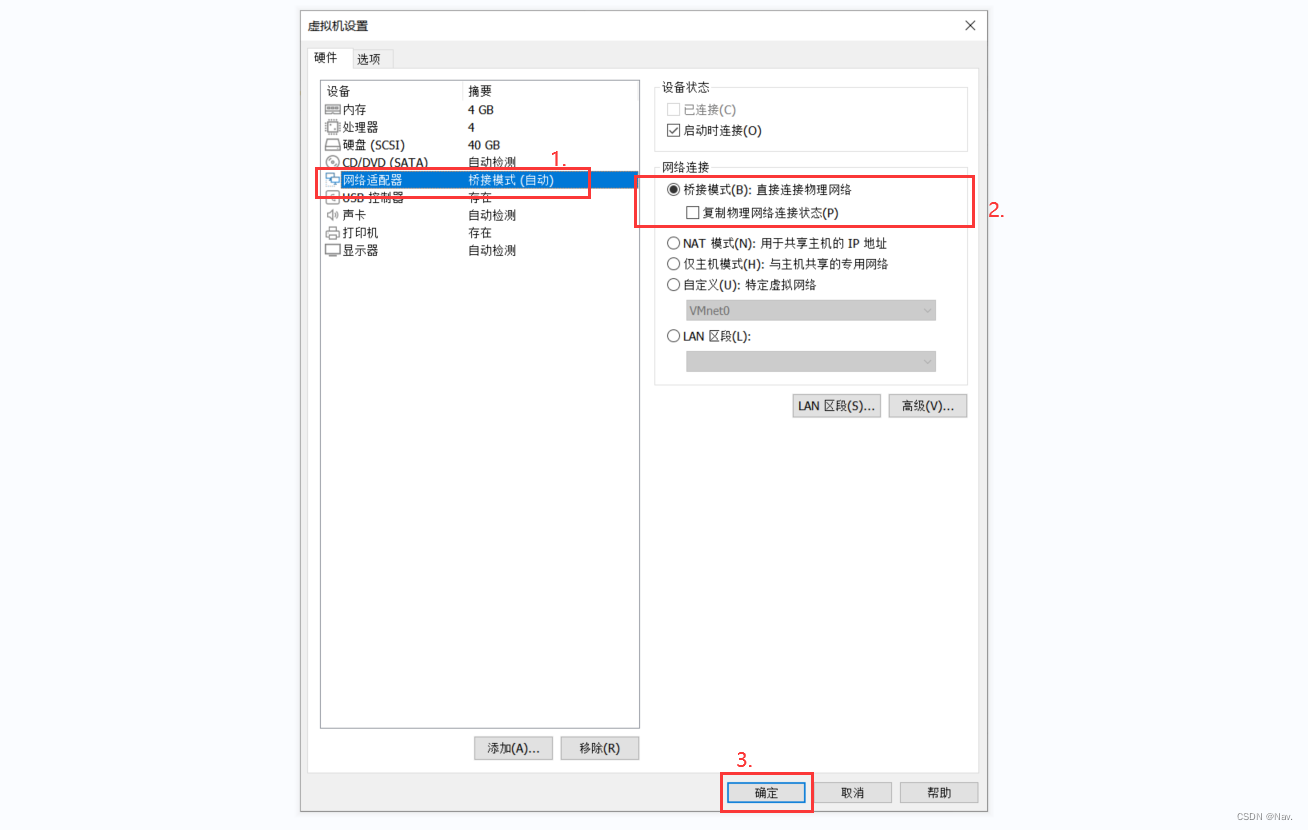
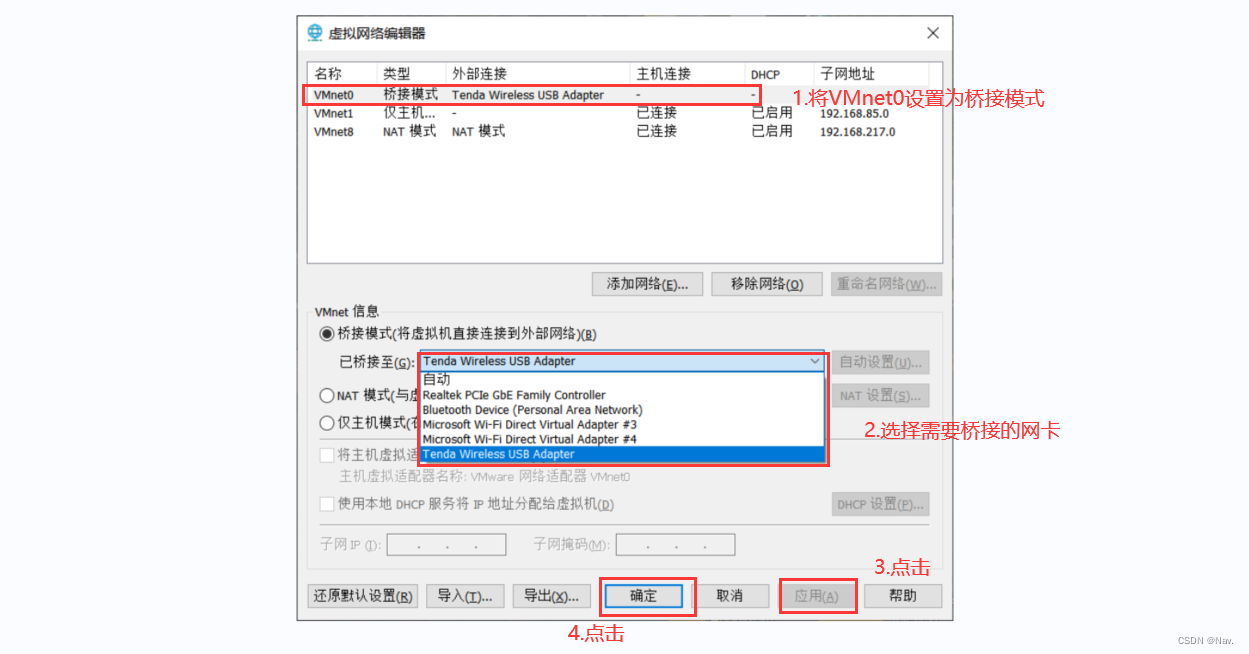
先要保证不同计算机处于同一网络中,最好分别设置固定IP,如果为虚拟机,需要将网络适配器改为桥接模式;
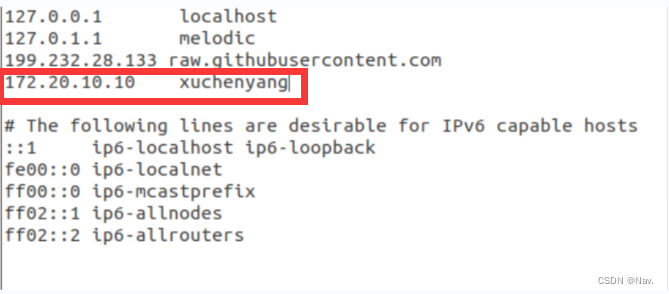
2.2 配置文件修改
分别修改不同计算机的 /etc/hosts 文件,在该文件中加入对方的IP地址和计算机名:
主机端:
从机的IP 从机计算机名
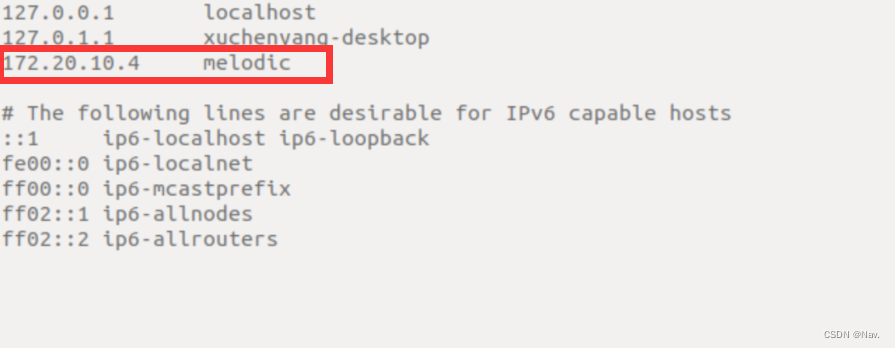
从机端:
主机的IP 主机计算机名
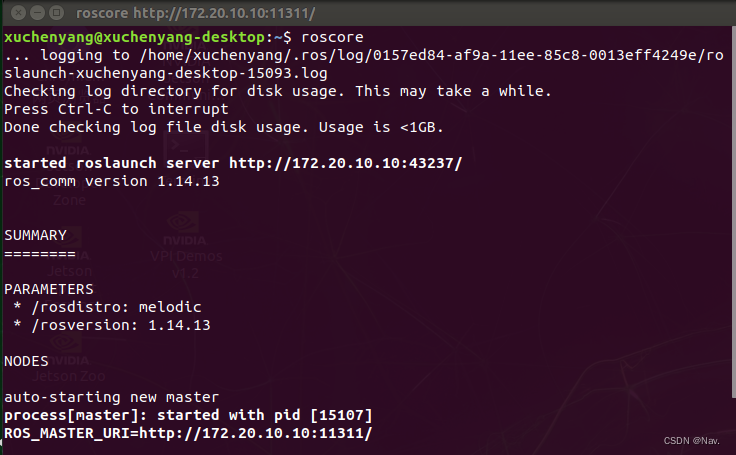
2.3 配置主机IP
使用vi命令在~/.bashrc 后追加:
export ROS_MASTER_URI=http://主机IP:11311
export ROS_HOSTNAME=主机IP

2.4 配置从机IP
配置从机的 IP 地址,从机可以有多台,每台都做如下设置:
使用vi命令在~/.bashrc 后追加:
export ROS_MASTER_URI=http://主机IP:11311
export ROS_HOSTNAME=从机IP

2.5 测试
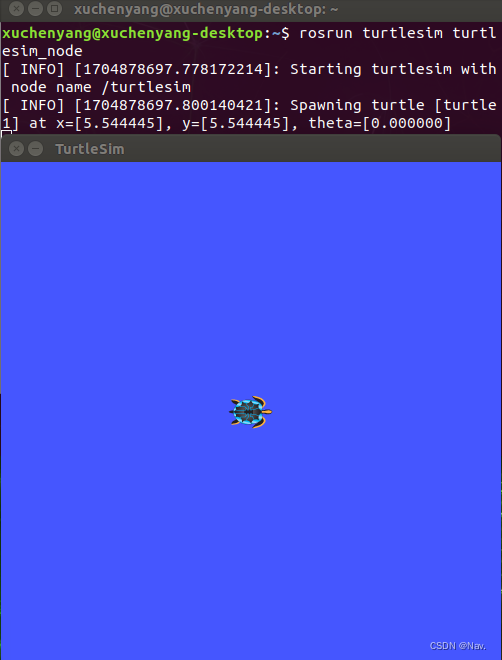
- 主机启动roscore,并启动乌龟节点。
- 从机启动键盘控制节点控制乌龟运动。
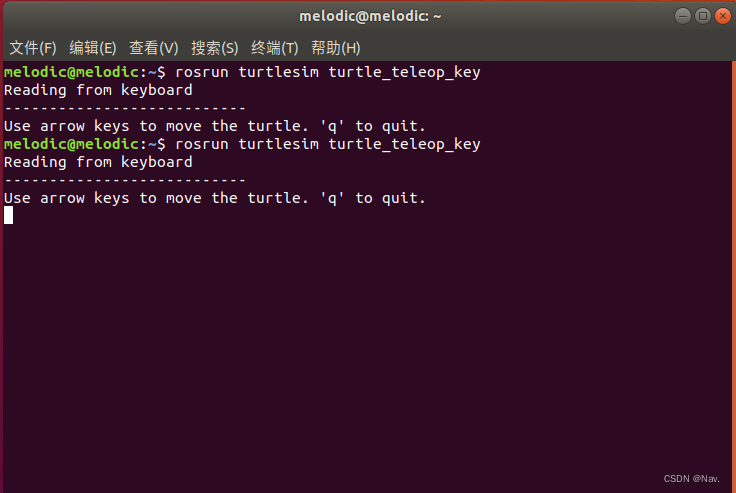
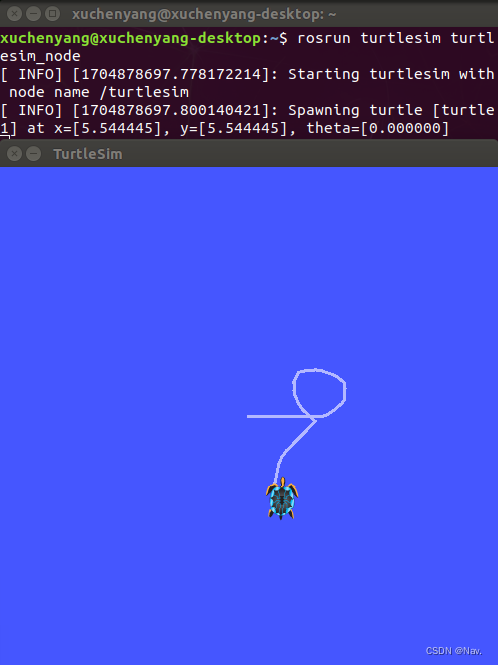
可以看到利用分布式框架可以实现在不同的设备控制机器人。
文章来源:https://blog.csdn.net/weixin_47268803/article/details/135491885
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- spring retry 配置及使用
- 明明随机数
- 如何进行落地的数据分析,并提出落地的分析建议?
- Three.js 详细解析(持续更新)
- 【数据库连接】连接sqlite3报错:go-sqlite3 requires cgo to work. This is a stub
- Python实现【亚马逊商品】数据采集
- 使用python将图像复刻到excel表格
- 10个必会的Linux命令
- 使用Python开发连连看游戏的技术指南
- clickhouse 数据导入导出操作