红外传感器循迹过圆环
发布时间:2024年01月22日
前言
很多人玩智能车第一步都是红外循迹,但是大多都没有去过圆环,下面过圆环思路,仅供参考.
一.红外循迹
一般循迹都是用两个红外传感器,当然多个更好,左右传感器控制两个轮子的差速来进行转向.
其实不过圆环一个传感器就足以循迹,只需要在没有检测到黑线时右转,检测到黑线时左转,两个轮子的速度差别太大(不然太摇摆),不过缺点是过不了圆环,一旦小车在线的右侧或者速度太快,车就会冲出赛道.

if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_6)==1)motor_run (60,30);
else motor_run (45,60);
解决这个问题则需要加两个传感器,一个左侧一个右侧,一旦中间传感器越过黑线,被外侧传感器检测,逻辑就会反过来.
if(loc==1) //左传感器检测到黑
{
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_6)==1)motor_run (60,30);
else motor_run (45,60);
}
if(loc==2) //右传感器检测到黑
{
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_6)==1)motor_run (30,60);
else motor_run (60,45);
}
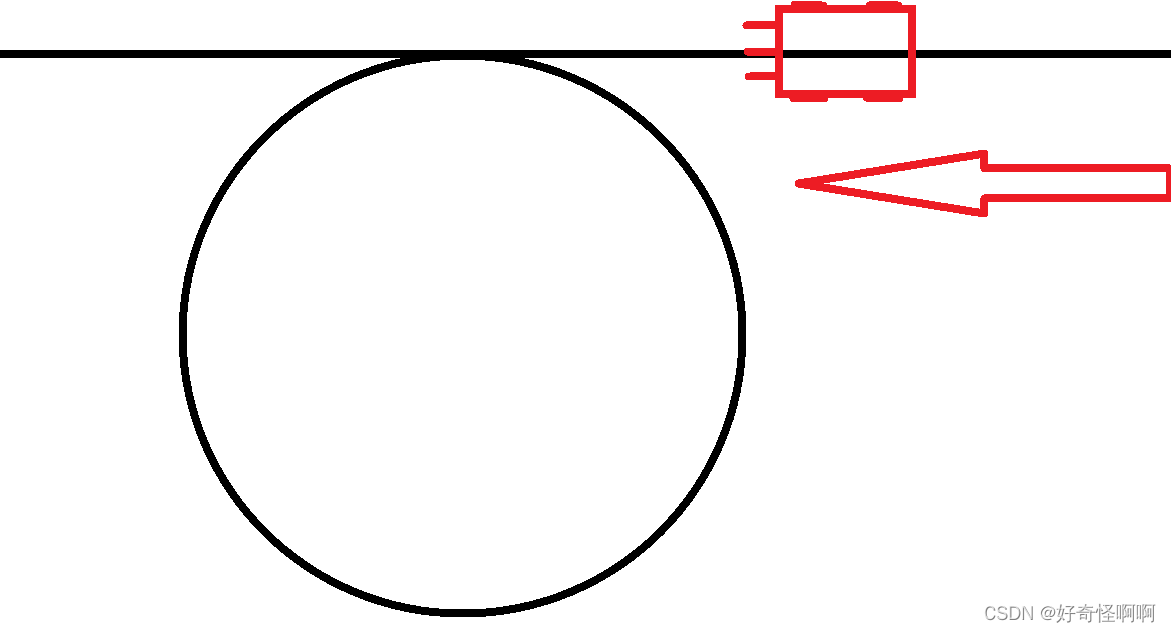
二.过圆环
外侧两个传感器会检测到圆环的线,根据上面的逻辑就会进出圆环,很丝滑

三.完整代码
代码很简单
main.c
#include "stm32f10x.h"
#include "hongwai.h"
#include "motor.h"
int loc;
int main(void)
{
hongwai_Init();
PWM_Init();
motor_init ();
while(1)
{
hongwaijiyi ();
if(loc==1) //左传感器检测到黑
{
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_6)==1)motor_run (60,30);
else motor_run (45,60);
}
if(loc==2) //右传感器检测到黑
{
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_6)==1)motor_run (30,60);
else motor_run (60,45);
}
}
}
hongwai.c
#include "stm32f10x.h"
extern int loc;
void hongwai_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9|GPIO_Pin_2 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
void hongwaijiyi()
{
if(GPIO_ReadInputDataBit(GPIOB ,GPIO_Pin_9 )==1)loc =1;
else if(GPIO_ReadInputDataBit(GPIOB ,GPIO_Pin_7 )==1)loc =2;
else loc=loc;
}
hongwai.h
#ifndef __hongwai_H
#define __hongwai_H
void hongwai_Init(void);
void hongwaijiyi();
#endif
motor.c
#include "stm32f10x.h"
void PWM_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //GPIO初始化
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
TIM_OC3Init(TIM2, &TIM_OCInitStructure);
TIM_OC4Init(TIM2, &TIM_OCInitStructure);
TIM_Cmd(TIM2, ENABLE);
}
void PWM_SetCompare3(uint16_t Compare3)
{
TIM_SetCompare3(TIM2, Compare3);
}
void PWM_SetCompare4(uint16_t Compare4)
{
TIM_SetCompare4(TIM2, Compare4);
}
void motor_init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14 | GPIO_Pin_15 | GPIO_Pin_12 | GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIO初始化
PWM_Init();
}
void motor_run(int L,int R)
{
if(L>0)
{ GPIO_ResetBits(GPIOB, GPIO_Pin_12);
PWM_SetCompare3(L);
if(L<0)
{ GPIO_SetBits(GPIOB, GPIO_Pin_12);
PWM_SetCompare3(-L);
}
if(R>0)
{ GPIO_ResetBits(GPIOB, GPIO_Pin_14);
PWM_SetCompare4(R);
}
if(R<0)
{ GPIO_SetBits(GPIOB, GPIO_Pin_14);
PWM_SetCompare4(-R);
}
}motor.h
#ifndef __MOTOR_H
#define __MOTOR_H
void PWM_Init(void);
void PWM_SetCompare3(int Compare3);
void PWM_SetCompare4(int Compare4);
void motor_init(void);
void motor_run(int L,int R);
#endif
文章来源:https://blog.csdn.net/2302_80060043/article/details/135737232
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 扭蛋机小程序搭建,运营优势有哪些?
- RHCSA 9版本考试资料
- 蓝牙物联网智慧物业解决方案
- 大数据Doris(五十一):Colocation Join介绍
- 基于Java SSM框架实现医院管理系统项目【项目源码】
- Linux高级系统编程-MySQL,使用C语言操作MySQL
- 护眼大路灯到底怎么选?2024实用大路灯推荐
- c# public string 和 public void
- “华为杯”研究生数学建模竞赛2016年-【华为杯】B题:具有遗传性疾病和性状的遗传位点分析(附R语言和Python代码实现)
- 最短路径(Dijstra, Floyd, Bellman-Ford, SPFA)