ROS2 Humble学习笔记
本文发表与个人的github pages。部分内容未同步到这里。
想查看完整内容,请移步到ROS2 Humble学习笔记。
一、前言
2013年的时候已经接触ROS了,当时断断续续学习了一些ROS的基础知识。16年搬到深圳之后,也有幸参加过星火的一次关于ROS的一些活动。当时活动的主讲之一是CSDN上ROS知识传播界的大牛的古月和港中文的林天麟先生。然而,因为自己一直涉猎的是嵌入式领域,一直没有在ROS上有所深耕。十年过去了,我相信我的知识已经足够从头到尾做一台机器人小车(无论是嵌入式软硬件合适结构)。所以我决定开始重新学习ROS。当年ROS2还没有完成,现在ROS2的LTS版本已经是humble了(ROS的版本大体是按照字母顺序起名的,所以你可以看到进展)。
这次学习,我的目标是达到中级水平,能够按照自己的需求开发机器人系统所需要的功能包。另一方面,在工程上我希望基于手边的Jetson Nano自己制作一台机器人。在这些够完成之后,开始个人的机器人项目:Artemis。
除了ROS2的学习,我还希望同时了解和学习Nvidia的ISAAC ROS开发方法。好在我的笔记本基本满足ISAAC的最低要求。知识内存需要从16G升级到32G。目前暂且使用笔记本来开发ISAAC,后续如果实在需要服务器或者PC机,可能这将是一笔较大的投入。不过暂时先将此时放在一边。
好了,现在开始学习吧。愿计划可以达成。
二、安装
为了安装humble,我的计算机目前安装的Ubuntu22.04,这也是一个LTS版本。安装过程并不复杂,我按照官方的教程在笔记本(AMD64)和Raspberry Pi 4(ARM64)。
但是在我的Jetson Nano上遇到了问题。这是因为Nvidia对于Jetson Nano的支持并不积极,目前Nvidia的JetPack5(基于ubuntu20.04)支持的是orin系列和AVG系列。似乎JetPack 6(基于ubuntu22.04)也已经预发布了。似乎还继续支持orin和AVG系列。但按照我们对于Nvidia的了解,对于orin的支持也仅到JetPack6. Ubuntu 24.04将会是2024年另一个LTS版本,厂家的程序可能会延后半年到一年。所以nvidia未来的JetPack7可能会在2024年底或者2025年发布。相应的新Jetson硬件也应该会在2024年发布。所以如果需要购买Jetson,我们可以再等一等。暂时还是设法让Jetson Nano对humble进行支持。下面这几张图是Nvidia的产品和软件Roadmap,我觉得很讽刺的是支持的最后年限并不意味着软件和系统也跟着做相应的支持。
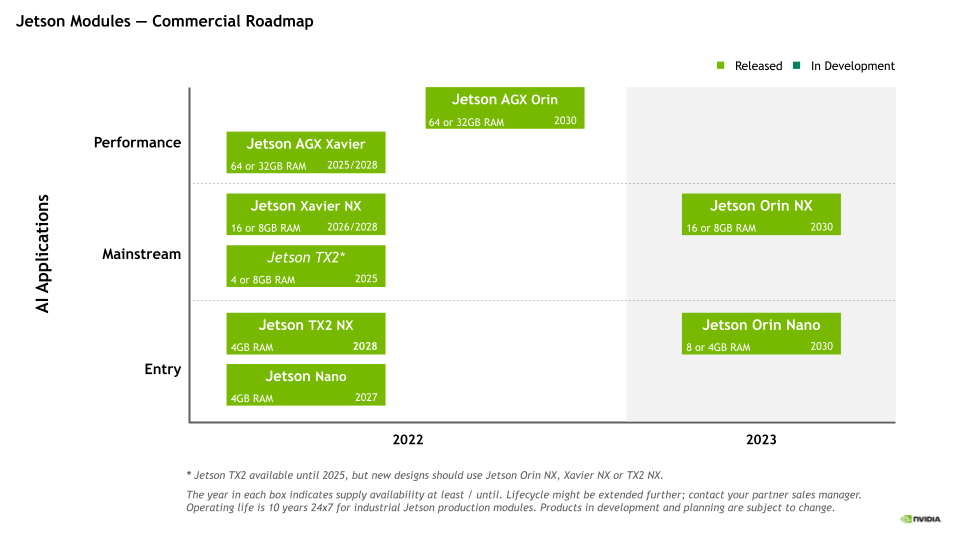
图1:Jetson模块消费版路线图
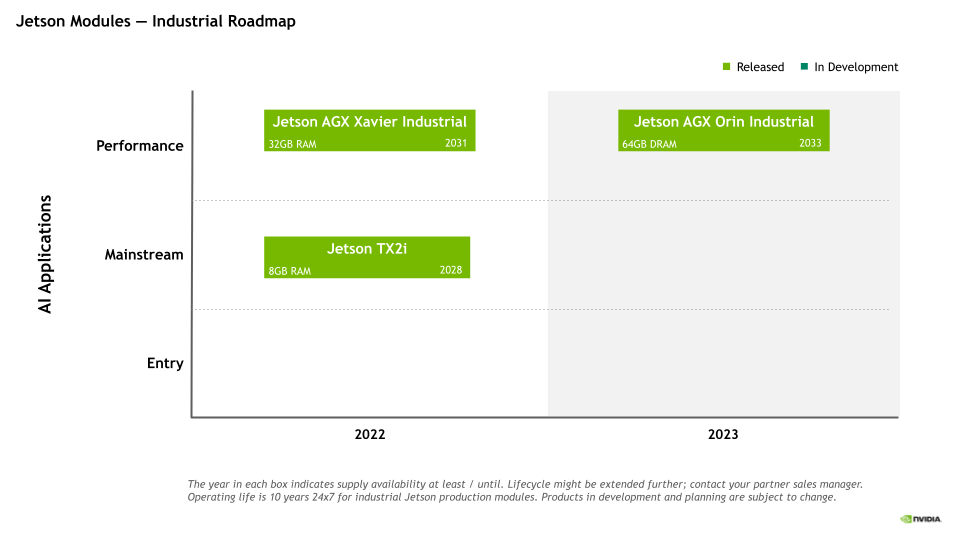
图2:Jetson模块工业版路线图
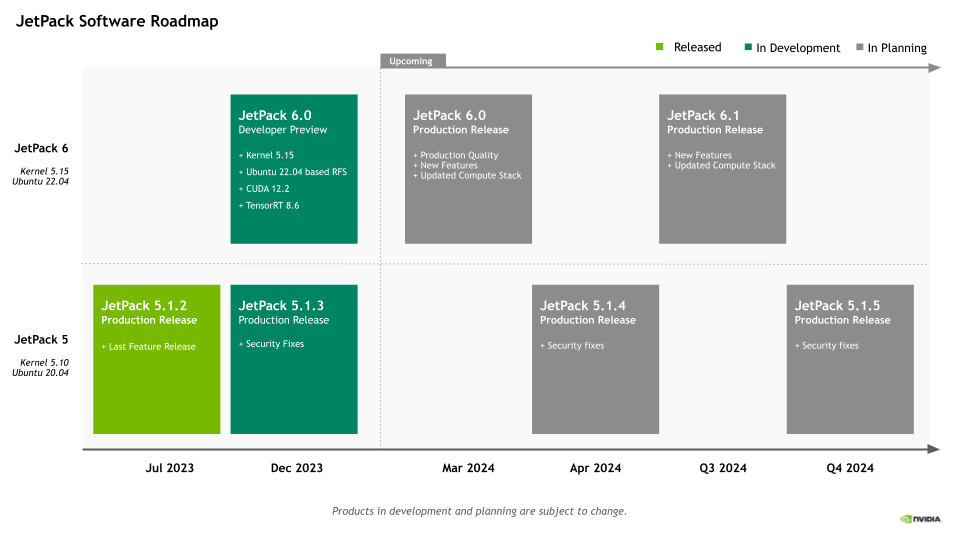
图3:JetPack软件路线图
在搜索了一通之后,发现目前的道路有三条。一条是容易的道路,使用别人已经编译好的容器。另一条更难的道路是自行编译ROS2使其支持ubuntu18.04.第三条是让Jetson Nano支持ubuntu22.04.因为现在属于初期阶段,不想在起步阶段就卡住。所以我暂时使用容器的方法。当然这条道路坑也很多。
2.1 Jetson Nano容器方法运行ROS2 Humble
在开始正文之前,我简单说一下为什么会选择Humble,因为这是目前的最新的LTS版本,支持时间也相对比较长。感兴趣的朋友可以去ROS网站查看一下每个版本的支持时间。
2.1.1 基础安装和尝试
Jetson Nano容器安装也是Nvidia官方支持的一部分。我们可以在他们的[链接](Jetson Containers)找到相应的说明。这个链接中包含多个ROS版本的Base、Core、Desktop镜像。
具体的安装方法可以看上面的链接中的说明。这里简单枚举一下命令:
#下载镜像到本地
sudo docker pull dustynv/ros:humble-ros-base-l4t-r32.7.1
# 通过镜像方式运行,这是一种比较节省空间的方式
sudo docker run --runtime nvidia -it --rm --network=host dustynv/ros:humble-ros-base-l4t-r36.2.0
#另一种更powerful的方式是直接clone整个仓库,然后在本都build和运行
#但是这种方式应该会占用更多空间,上手会有一定的难度。
#可以在稍微熟悉之后再尝试
2.1.2 docker运行界面程序遇到的问题和解决办法
在docker界面运行ros2后如果要运行turtlesim_node,rqt等依赖gui的程序时要怎么解决问题。
2.1.3 docker运行界面程序的IP问题
2.1.X 更多问题
2.2 与ROS相关的vscode的插件
古月的ROS2入门21讲里面里面很好的总结了ROS2开发相干的插件,这里转述如下:
- ROS开发语言相关的python和C/C++插件。还有智能提示插件IntelliCode。这三个都是microsoft出的。还有CMAKE插件,古月推荐的是twxs提供的CMake插件,而不是由微软提供的CMake Tools。
- 美化相关的除了各种主题之外还有语言插件和叫做vscode-icons的插件。(也是microsoft出品)
- 与ROS直接相关的插件有:microsoft出的ROS(对ROS1和ROS2提供开发支持);msg格式支持的Msg Language Support(作者是ajshort);由smilerobotics制作的URDF插件对URDF文件提供支持;
三、ROS2基础学习
3.1 怎么查看turtlesim某个包的可执行文件
在官方的示例中,我们看到ros2 run的基本格式如下:ros2 run <package_name> <executable_name>,但是当我们拿到一个package的时候怎么它的executable对象呐。其实和我们查看我们的环境中的的packages是类似的。
# 查看pack命令
ros2 pkg list
# 查看是否包含某个名称的pack,例如寻找和urdf相关的包
ros2 pkg list | grep urdf
# 查看某个包的可执行程序,比如我们查看turtlesim包含的可执行程序
ros2 pkg executables turtlesim
#你将会收到如下response
# turtlesim draw_square
# turtlesim mimic
# turtlesim turtle_teleop_key
# turtlesim turtlesim_node
3.2 深刻理解spawn操作
在官方入门教程Using turtlesim, ros2, and rqt那一章中指导我们利用rqt产生一个turtle,但是在看ros2入门21讲的时候我注意到它是利用命令行产生的另一个turtle。命令如下:
ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: ''}"
3.2.1 追根溯源,弄懂怎么控制小乌龟
但是这条命令的格式为什么是这样,如果我要自己编辑一个命令靠死记硬背肯定不行呀。其实这也不是很复杂,我跟着ros2的命令提示操作起来。
# 1. 我们先看一下ros2都支持啥命令.
# 为了便于描述,我在自己输入的命令前加上了‘$ ’
$ ros2 -h
action Various action related sub-commands
bag Various rosbag related sub-commands
component Various component related sub-commands
daemon Various daemon related sub-commands
doctor Check ROS setup and other potential issues
interface Show information about ROS interfaces
launch Run a launch file
lifecycle Various lifecycle related sub-commands
multicast Various multicast related sub-commands
node Various node related sub-commands
param Various param related sub-commands
pkg Various package related sub-commands
run Run a package specific executable
security Various security related sub-commands
service Various service related sub-commands
topic Various topic related sub-commands
wtf Use `wtf` as alias to `doctor`
# 共有17个参数,缩写和单词都是单数。不要误写成复数形式。
# 我们可以看到doctor和daemon分别是负责issue检查和守护程序的相关功能, wtf和docter一样
# lifecycle用来运行和生命周期相关的功能;multicast和组播相关;security应该是和加密相关的功能
# run用来运行包的可执行程序文件;launch运行启动文件;bag是用来记录、播放、查询rosbag的功能集
# pkg是ros功能包相关的功能集;interface和pkg的接口相关的功能集,下面会重点用到它
# components看提示适合container(容器)以及component(组件/元件)相关的。但目前还不知道用法
# param和node(节点)相关的参数操作相关的功能集
# node/service/action/topic是ROS2中一些基础概念,后面会提到
# 2. 起初我并不知道spawn到底是属于service,topic,action或是param
# 但是没关系,我们用list分别看看各自包含什么
$ ros2 node list
/turtlesim
$ ros2 action list
/turtle1/rotate_absolute
$ ros2 param list
/turtlesim:
background_b
background_g
background_r
qos_overrides./parameter_events.publisher.depth
qos_overrides./parameter_events.publisher.durability
qos_overrides./parameter_events.publisher.history
qos_overrides./parameter_events.publisher.reliability
use_sim_time
$ ros2 topic list
/parameter_events
/rosout
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
$ ros2 service list
/clear
/kill
/reset
/spawn
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/describe_parameters
/turtlesim/get_parameter_types
/turtlesim/get_parameters
/turtlesim/list_parameters
/turtlesim/set_parameters
/turtlesim/set_parameters_atomically
# 上面是当我之前只开启了一个turtlesim_node之后的情况
# 可以看到spwan属于服务,当随着之后的学习我相信应该可以更准确的预测某个功能是service还是topic
# 好了我们现在锁定了我们想要的spwan功能属于一个service,具体是’/spawn‘
# 3.那么我们不妨先看一下service到底有啥操作
$ ros2 service -h
usage: ros2 service [-h] [--include-hidden-services] Call `ros2 service <command> -h` for more detailed usage. ...
Various service related sub-commands
options:
-h, --help show this help message and exit
--include-hidden-services
Consider hidden services as well
Commands:
call Call a service
find Output a list of available services of a given type
list Output a list of available services
type Output a service's type '
Call `ros2 service <command> -h` for more detailed usage.
$ ros2 service call -h
ros2 service call -h
usage: ros2 service call [-h] [-r N] service_name service_type [values]
Call a service
positional arguments:
service_name Name of the ROS service to call to (e.g. '/add_two_ints')
service_type Type of the ROS service (e.g. 'std_srvs/srv/Empty')
values Values to fill the service request with in YAML format (e.g. '{a: 1, b: 2}'), otherwise the service request will be published with default values
options:
-h, --help show this help message and exit
-r N, --rate N Repeat the call at a specific rate in Hz
# 很显然ros2 service call是我们最终要使用的可执行程序它需要三个参数
# 第一个参数是service_name,这里是我们用`ros2 service list`的时候查询到的`/spwan`
# 第二个参数是service_type,按照上面的输出我们应该可以通过调用type查询到
# 第三个参数是values,需要参数是YAML形式的。这个是问题的核心。这个参数可选,忽略后用默认值。
# 4. 我们先来找到第二个参数
$ ros2 service type /spawn
turtlesim/srv/Spawn
# 在反复品味这个指令之后,我的理解是type是这个service需要的数据结构/数据类型
# 在尝试了param之后想到interface应该包含这个数据结构的信息,一测试还真可以
# 5. 我们用interface查看一下第三个参数有什么
$ ros2 interface -h
usage: ros2 interface [-h] Call `ros2 interface <command> -h` for more detailed usage. ...
Show information about ROS interfaces
options:
-h, --help show this help message and exit
Commands:
list List all interface types available
package Output a list of available interface types within one package
packages Output a list of packages that provide interfaces
proto Output an interface prototype
show Output the interface definition
Call `ros2 interface <command> -h` for more detailed usage.
$ ros2 interface package turtlesim
turtlesim/srv/Spawn
turtlesim/srv/SetPen
turtlesim/srv/TeleportRelative
turtlesim/msg/Pose
turtlesim/msg/Color
turtlesim/action/RotateAbsolute
turtlesim/srv/Kill
turtlesim/srv/TeleportAbsolute
# 我们可以看到'turtlesim/srv/Spawn'正是turtlesim包的可用接口类型
# service type也是一种interface type。可以看到有srv,msg和action三种接口
# msg应该是topic用的,srv就是我们这里的service用的,action就是action用的
$ ros2 interface proto turtlesim/srv/Spawn
"x: 0.0
y: 0.0
theta: 0.0
name: ''
"
# 查看了类型的原型(prototype)
$ ros2 interface show turtlesim/srv/Spawn
float32 x
float32 y
float32 theta
string name # Optional. A unique name will be created and returned if this is empty
---
string name
# 显示更详细的信息
到这里我们就基本了解了怎么使用spawn去产生另一个乌龟。这里还有一个问题是YAML是什么数据格式。我这里提供一个菜鸟教程的链接.YAML的语法还是有一些比较严格的规格的,可以使用vscode中的redhat的YAML插件来检查数据内容是否符合规格。一般在shell中使用YAML的flow style形式。和json类似,但key不使用引号包裹。
根据上面的提示物品们就可以自己制作一个的命令,注意YAML语句需要用单引号或者双引号包裹:
ros2 service call /spawn turtlesim/srv/Spawn "{ x: 6, y: 6, theta: 0.0, name: 'wu_gui' }"
3.2.2 举一反三,我们试着使用“/reset”服务
按照上面类似的方法我们可以看一下/reset的用法:
# 查询第二个参数
$ ros2 service type /reset
std_srvs/srv/Empty
# 使用interface的show或者proto功能去查看这个类型的信息
$ ros2 interface proto std_srvs/srv/Empty
"{}
"
# 至此我们基本确定了value是空,这个参数可以省略
# 现在开始尝试一下
$ ros2 service call /reset std_srvs/srv/Empty
# 这时候你会发现之前界面上的两只乌龟都消失了,出来了另一只不同颜色的乌龟
3.2.3 扩展技能,使用action操作乌龟
在3.2.1的最后我们使用service创造了另一只乌龟,不过在3.2.2中我们又将它清除了。现在我们再次重复3.2.1的操作创建另一只名字叫"wu_gui"的turtle。
## 1. 查询目前支持的action
$ ros2 action -h
usage: ros2 action [-h] Call `ros2 action <command> -h` for more detailed usage. ...
Various action related sub-commands
options:
-h, --help show this help message and exit
Commands:
info Print information about an action
list Output a list of action names
send_goal Send an action goal
Call `ros2 action <command> -h` for more detailed usage.
## 2.查询一下send_goal需要什么参数
$ ros2 action send_goal -h
usage: ros2 action send_goal [-h] [-f] action_name action_type goal
Send an action goal
positional arguments:
action_name Name of the ROS action (e.g. '/fibonacci')
action_type Type of the ROS action (e.g. 'example_interfaces/action/Fibonacci')
goal Goal request values in YAML format (e.g. '{order: 10}')
options:
-h, --help show this help message and exit
-f, --feedback Echo feedback messages for the goal
## 3. 现在看一下都有那些action,可以看到我们的wu_gui节点有一个action
$ ros2 action list
/turtle1/rotate_absolute
/wu_gui/rotate_absolute
## 4. 查询/wu_gui/rotate_absolute这个action的信息
$ ros2 action info -h
usage: ros2 action info [-h] [-t] [-c] action_name
Print information about an action
positional arguments:
action_name Name of the ROS action to get info (e.g. '/fibonacci')
options:
-h, --help show this help message and exit
-t, --show-types Additionally show the action type
-c, --count Only display the number of action clients and action servers
$ ros2 action info -t /wu_gui/rotate_absolute
Action: /wu_gui/rotate_absolute
Action clients: 0
Action servers: 1
/turtlesim [turtlesim/action/RotateAbsolute]
## 此时我们得到send_goal的action_name和action_type,还需要一个goal
## 5. 类似与之前的方法我们用interface指令去查询turtlesim/action/RotateAbsolute
$ ros2 interface proto turtlesim/action/RotateAbsolute
"theta: 0.0
"
# 至此我们基本确定了所有的参数
# 6. 现在开始尝试发送指令
ros2 action send_goal /wu_gui/rotate_absolute turtlesim/action/RotateAbsolute "{ theta: 1.732}"
Waiting for an action server to become available...
Sending goal:
theta: 1.732
Goal accepted with ID: 8733fdd9a69a4bfebda19fae76b0912d
Result:
delta: -0.9440000057220459
Goal finished with status: SUCCEEDED
现在你会发现乌龟已经朝向了顶部。
3.2.4 继续折腾,使用topic和乌龟对话
topic是ros2很重要的概念,turtlesim下面有很多topic。稍后我会展示cmd_vel这个Topic。
# 1. 我们先看一下topic的功能
$ ros2 topic -h
usage: ros2 topic [-h] [--include-hidden-topics] Call `ros2 topic <command> -h` for more detailed usage. ...
Various topic related sub-commands
options:
-h, --help show this help message and exit
--include-hidden-topics
Consider hidden topics as well
Commands:
bw Display bandwidth used by topic
delay Display delay of topic from timestamp in header
echo Output messages from a topic
find Output a list of available topics of a given type
hz Print the average publishing rate to screen
info Print information about a topic
list Output a list of available topics
pub Publish a message to a topic
type Print a topic's type '
# 可以看到topic的功能还是很复杂的,后面我只展示几个主要步骤
# 2. 我们看一下当前有什么topic
$ ros2 topic list
/parameter_events
/rosout
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
/wu_gui/cmd_vel
/wu_gui/color_sensor
/wu_gui/pose
# 3. pub按照解释应该是发布(publish)主题的我们简单看一下它的用法
ros2 topic pub -h
usage: ros2 topic pub [-h] [-r N] [-p N] [-1 | -t TIMES] [-w WAIT_MATCHING_SUBSCRIPTIONS] [--keep-alive N] [-n NODE_NAME]
[--qos-profile {unknown,system_default,sensor_data,services_default,parameters,parameter_events,action_status_default}] [--qos-depth N]
[--qos-history {system_default,keep_last,keep_all,unknown}] [--qos-reliability {system_default,reliable,best_effort,unknown}]
[--qos-durability {system_default,transient_local,volatile,unknown}] [--spin-time SPIN_TIME] [-s]
topic_name message_type [values]
Publish a message to a topic
positional arguments:
topic_name Name of the ROS topic to publish to (e.g. '/chatter')
message_type Type of the ROS message (e.g. 'std_msgs/String')
values Values to fill the message with in YAML format (e.g. 'data: Hello World'), otherwise the message will be published with default values
options:
-h, --help show this help message and exit
-r N, --rate N Publishing rate in Hz (default: 1)
-p N, --print N Only print every N-th published message (default: 1)
-1, --once Publish one message and exit
-t TIMES, --times TIMES
Publish this number of times and then exit
-w WAIT_MATCHING_SUBSCRIPTIONS, --wait-matching-subscriptions WAIT_MATCHING_SUBSCRIPTIONS
Wait until finding the specified number of matching subscriptions. Defaults to 1 when using "-1"/"--once"/"--times", otherwise defaults to 0.
--keep-alive N Keep publishing node alive for N seconds after the last msg (default: 0.1)
-n NODE_NAME, --node-name NODE_NAME
Name of the created publishing node
--qos-profile {unknown,system_default,sensor_data,services_default,parameters,parameter_events,action_status_default}
Quality of service preset profile to publish)
--qos-depth N Queue size setting to publish with (overrides depth value of --qos-profile option)
--qos-history {system_default,keep_last,keep_all,unknown}
History of samples setting to publish with (overrides history value of --qos-profile option, default: keep_last)
--qos-reliability {system_default,reliable,best_effort,unknown}
Quality of service reliability setting to publish with (overrides reliability value of --qos-profile option, default: reliable)
--qos-durability {system_default,transient_local,volatile,unknown}
Quality of service durability setting to publish with (overrides durability value of --qos-profile option, default: transient_local)
--spin-time SPIN_TIME
Spin time in seconds to wait for discovery (only applies when not using an already running daemon)
-s, --use-sim-time Enable ROS simulation time
# 尽管pub的命令很复杂,但是主要的参数还是3个:name,type,value
# 这和action,service并不区别。其中value有时是可选的
# 只是topic多了很多更多样的options,这些options后面慢慢研究
# 4. info和type都可以看到某个topic的类型,这里我们使用type看一下/wu_gui/cmd_vel的类型
$ ros2 topic type /wu_gui/cmd_vel
geometry_msgs/msg/Twist
# 这样我们就获得了第二个参数
# 现在根据第二个参数来了解第三个参数要怎么输入
$ ros2 interface show geometry_msgs/msg/Twist
# This expresses velocity in free space broken into its linear and angular parts.
Vector3 linear
float64 x
float64 y
float64 z
Vector3 angular
float64 x
float64 y
float64 z
$ ros2 interface proto geometry_msgs/msg/Twist
"linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
"
# 上面的信息显示了线速度和角速度,每个都是三个参数组成的矢量,每个参数都是float64类型的。
# float64暂时不知道是不是double还是一种特殊定义的float类型。
# 5. 按照上面的信息我们来组合一个pub命令
$ ros2 topic pub /wu_gui/cmd_vel geometry_msgs/msg/Twist "{ linear: { x: 5.0, y: 0.0, z: 0.0 }, angular: { x: 0.0, y: 0.0, z: 1.732 }}"
现在你可以看到一个旋转的乌龟:
图4:旋转乌龟
?
<本文完/2024.01.09/watershade2010]>
<后续部分未转载>
想查看完整内容,请移步到ROS2 Humble学习笔记。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 原生IP代理如何帮助跨境电商店铺做谷歌广告投放业务的?
- 推荐HuoCMS多站点多语言CMS系统源码
- day 20二叉树(六)【day19休息】
- 从无到有:AI绘画API在插画与游戏设计中的应用
- 【2024系统架构设计】 系统架构设计师第二版-信息系统架构设计理论与实践
- 【Docker】私有仓库
- SpringBoot中日志的使用
- JavaEE 网络原理
- Spring之bean的实例化方式
- VL171 VL170配合LDR6020的type-c母座显示器方案