超维空间M1无人机使用说明书——61、ROS无人机yolo识别与投放
发布时间:2024年01月07日
引言:使用yolo进行物体识别,根据返回的目标位置信息,控制无人机全向移动,当无人机到达目标物的正上方,满足一定的误差阈值后,ROS发布控制控制将舵机挂载的物体抛下,紧接着无人机前往起飞点上方寻找降落的目标点降落。
一、一键启动识别与投放程序
roslaunch robot_bringup bringup_precise_drop.launch

未出现红色报错,表明程序运行正常
launch文件详解
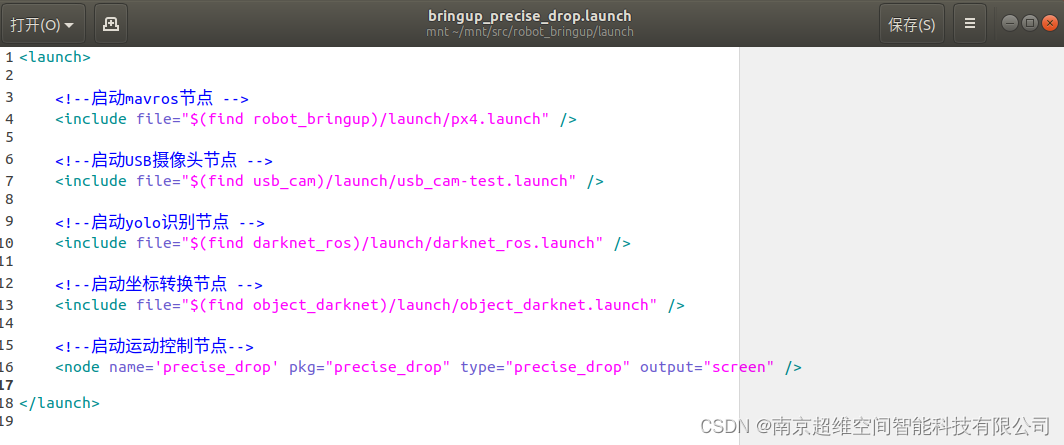
launch文件启动了四个节点,节点作用如下
1、mavros通信节点,实现底层PX4和ROS通信
2、启动USB摄像头节点,提供图像数据
3、启动yolo识别节点
4、启动坐标转换节点,该节点会将识别到的目标物体的的中心位置以话题的方式打印出来
5、启动运动控制节点,该节点定位实时的目标物体的位置信息,进行运动控制,直到满足允许误差的阈值
二、视频演示
文章来源:https://blog.csdn.net/qq_35598561/article/details/135444135
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 代码随想录算法训练营29期Day23|LeetCode 669,108,538
- 解决 PHPExcel 长数字串显示为科学计数
- 二叉树的最大深度,力扣
- x-cmd pkg | xsv - CSV 和 TSV 文件处理器
- mysql 锁 事务 脏读 不可重复读 幻读
- 领域特定语言(Domain-Specific Language, DSL)在 Visual Studio 2022中的实验——建立领域模型
- 一文读懂$mash 通证的 “Fair Launch” 规则,将公平发挥极致
- 算法Day31 房间收纳
- 【JavaWeb】Request(学习笔记)
- 2024年【登高架设】考试及登高架设找解析