RT-DETR原理与简介(干翻YOLO的最新目标检测项目)
RT-DETR(Real-Time Detection, Embedding, and Tracking)是一种基于Transformer的实时目标检测、嵌入和跟踪模型。它通过结合目标检测、特征嵌入和目标跟踪三个任务,实现了高效准确的实时目标识别和跟踪。
RT-DETR的核心思想是将目标检测和目标跟踪这两个传统独立的任务进行统一建模,并利用Transformer网络进行特征提取和关联学习。相比于传统的两阶段目标检测器,RT-DETR采用端到端的方式,直接从输入图像中提取目标特征并输出目标的位置和类别信息,极大地简化了目标检测流程。
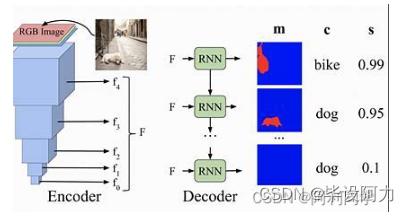
RT-DETR的工作流程如下:首先,通过卷积神经网络(CNN)提取输入图像的特征表示。然后,使用Transformer编码器对特征进行处理,生成一组包含目标位置和类别的嵌入向量。在目标跟踪阶段,RT-DETR使用匈牙利算法将当前帧的目标嵌入与前一帧中的目标嵌入进行匹配,实现目标的连续跟踪。最后,根据目标嵌入和匹配结果,输出目标的最终检测和跟踪结果。
RT-DETR的优势在于其高效性和准确性。由于使用Transformer网络,RT-DETR可以并行处理多个目标,并且在GPU上实现高度优化的运算,实现实时检测和跟踪。此外,RT-DETR通过将目标检测、嵌入和跟踪任务进行统一建模,学习到了目标之间的关联信息,有助于提高检测的准确性和鲁棒性。
总结来说,RT-DETR是一种基于Transformer的实时目标检测、嵌入和跟踪模型,通过统一建模和Transformer网络的特征提取,实现了高效准确的目标识别和跟踪。它在实时应用场景中具有广泛的应用前景,如自动驾驶、智能监控等领域。
概述与简介
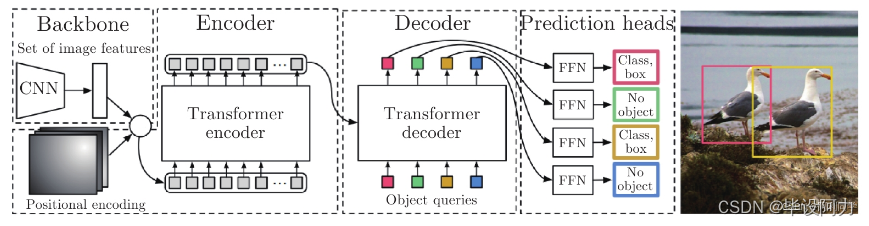
RT-DETR是一种实时目标检测模型,它结合了两种经典的目标检测方法:Transformer和DETR(Detection Transformer)。Transformer是一种用于序列建模的神经网络架构,最初是用于自然语言处理,但已经被证明在计算机视觉领域也非常有效。DETR是一种端到端的目标检测模型,它将目标检测任务转换为一个对象查询问题,并使用Transformer进行解决。RT-DETR采用了DETR的结构,但采用了一些优化措施,以实现实时目标检测。
在介绍RT-DETR之前,我们先来了解一下目标检测的基本概念。目标检测是计算机视觉领域的一个重要问题,它的目标是从图像或视频中检测出特定物体的位置和类别。在过去的几十年中,研究人员提出了许多目标检测方法,包括基于特征的方法、基于模板的方法、基于深度学习的方法等。其中,深度学习方法在最近几年中取得了很大的进展,尤其是基于卷积神经网络(CNN)的方法,如Faster R-CNN、YOLO、SSD等都已经取得了很好的效果。
?
当前目标检测存在问题
然而,这些方法都有一个共同的问题,那就是它们需要在图像的每个位置上进行计算,因此计算成本很高,不适合实时应用场景。为了解决这个问题,研究人员开始探索如何使用端到端的神经网络模型来实现目标检测。其中,DETR就是一种很有代表性的模型。
来源
DETR是由Facebook AI研究团队提出的一种端到端的目标检测模型,它使用Transformer进行编码和解码。与传统的目标检测方法不同,DETR将目标检测问题转化为一个对象查询问题。具体来说,模型将图像中的每个像素位置视为查询向量,并使用Transformer编码器将其转换为一组特征向量。然后,模型使用一个解码器来预测每个对象的类别、边界框位置和对象特征向量,这些信息可以通过与查询向量的交互来获取。
DETR的优点
DETR的优点是它可以直接从图像中预测对象,而不需要通过预定义的锚框或候选框来进行检测。这种方法可以减少计算成本,并避免了由于不正确的框选导致的误检和漏检问题。此外,DETR还可以处理不同数量和大小的对象,并且可以直接输出对象特征向量,这些特征向量可以用于目标跟踪等后续任务。
然而,DETR的缺点是它的计算成本仍然很高,因此不适合实时应用场景。为了解决这个问题,研究人员开始探索如何对DETR进行优化,以实现实时目标检测。
原理
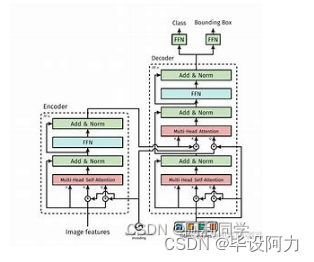
RT-DETR采用了与DETR相同的编码器和解码器结构,但对其进行了大量的优化。首先,RT-DETR使用了更小的特征图来减少计算成本。其次,RT-DETR使用更少的注意力头,以减少模型中的参数数量。此外,RT-DETR还引入了一种新的分组注意力机制,可以进一步提高性能。
具体来说,RT-DETR的编码器采用了ResNet50网络,但只保留了其前四个残差块,以减少特征图的大小。其解码器包括一个Transformer解码器和一个对象嵌入网络。与DETR不同的是,RT-DETR的Transformer解码器只有两个注意力头,而不是DETR的八个。此外,RT-DETR还使用了一种新的分组注意力机制,可以将注意力计算分为多个组,以提高计算效率。对象嵌入网络用于将每个对象的特征向量嵌入到模型中,以便进行后续的任务。
总结
RT-DETR的优点是它可以在保持较高精度的同时,实现实时目标检测,适用于许多应用场景,如自动驾驶、智能监控、机器人等。此外,RT-DETR还可以处理不同数量和大小的对象,并且可以直接输出对象特征向量,这些特征向量可以用于目标跟踪等后续任务。
总之,RT-DETR是一种非常有前景的实时目标检测模型,它结合了Transformer和DETR的优点,并采用了一系列优化措施,以实现实时目标检测。它已经在许多应用场景中得到了广泛的应用,并且随着计算硬件的不断提升,它的应用前景将会更加广阔。
部署
环境要求
cuda >= 11.7.1
nccl >= 2.7
paddlepaddle-gpu >= 2.4.1
?创建conda环境
conda create --name ppdet python=3.10
安装RT-DETR推荐的paddle版本
前往官网安装当前稳定的paddle版本[paddle-stable];
Clone项目代码
git clone -b develop \
https://github.com/PaddlePaddle/PaddleDetection.git
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 工业空调协议转BACnet网关BA108
- Milvus Cloud与携程的向量探索大公开
- GET气象台最新发布的气象预警数据
- 在Python中如何实现单例模式?
- SpringIOC之SimpleTimeZoneAwareLocaleContext
- Python办公自动化 -- Python发送电子邮件和Outlook的集成
- Go 语言实现冒泡排序算法的简单示例
- [Halcon&模块] Halcon13.0查询算子模块归属
- c# 读取文件方式及对比
- 思福迪Logbase运维安全管理系统test_qrcode_b接口远程命令执行漏洞漏洞复现 [附POC]