ros rqt_bag 用法汇总和用例
发布时间:2024年01月15日
rqt_bag 是一个用于ROS(机器人操作系统)中查看和编辑bag文件的工具。Bag文件是ROS用于记录和回放消息数据的一种格式。以下是 rqt_bag 的主要用法汇总和一些典型用例:
基本用法
-
启动
rqt_bag- 在终端中输入
rqt_bag。这会打开rqt_bag界面,允许你加载bag文件。
- 在终端中输入
-
加载bag文件
- 在
rqt_bag界面中,通过 “File” 菜单选择 “Open” 来打开一个bag文件。
- 在
-
查看消息
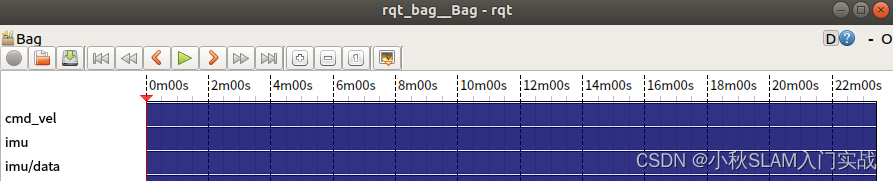
- 打开bag文件后,可以看到文件中所有话题的时间线。
- 点击话题名称可查看该话题的具体消息。
-
播放和暂停
- 使用界面底部的播放控制按钮来播放、暂停、调整播放速度或跳转到文件中的特定时间点。
-
查看和编辑消息数据
- 双击时间线上的某个消息,可以查看该消息的详细内容。
- 某些消息类型支持在
rqt_bag中直接编辑。
-
保存更改
- 对bag文件所做的任何更改都可以通过 “File” 菜单下的 “Save” 或 “Save As” 选项来保存。
高级功能
-
过滤话题
- 可以使用过滤功能来显示或隐藏特定的话题。
-
导出数据
rqt_bag允许你将选定的消息或话题导出为不同的格式,如CSV文件。
-
绘制数据图表
- 对于包含数值数据的消息,
rqt_bag可以生成时间序列图表。
- 对于包含数值数据的消息,
-
插件扩展
rqt_bag支持插件,可以扩展其功能,如添加对新消息类型的支持。
典型用例
- 故障诊断:查看记录的ROS消息,以帮助诊断机器人在特定时间发生的问题。
- 数据分析:分析和比较不同时间点或不同条件下记录的数据。
- 教学和演示:展示ROS系统中消息的传递和处理过程。
- 开发和测试:回放记录的数据以测试新的ROS节点或系统。
总之,rqt_bag 是ROS生态系统中一个非常有用的工具,它提供了一个直观的界面来查看、编辑和分析bag文件中的数据。
rqt_bag Vx.bag
文章来源:https://blog.csdn.net/qq_21950671/article/details/135603154
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Idea执行bat使用maven打包springboot项目成docker镜像并push到Harbor
- 【51、32单片机】模块化编程(.c .h文件)
- 可运营的虚拟物品发卡服务的平台,卡密寄售系统,支持自营和商家入驻模式
- pyhackrf 发送写法重点 一定要这样写才能发送
- 文本翻译GUI程序,实现简单的英汉互译
- 接口功能测试策略
- el-dialog的modal-class
- 【优先队列】378. 有序矩阵中第 K 小的元素
- DayDayPoc平台2023年度十大漏洞盘点
- DevC++ easyx实现视口编辑,在超过屏幕大小的地图上画点,与解决刮刮乐bug效果中理解C语言指针的意义