ArduPilot开源代码之MatekSys Optical Flow 3901-L0X
ArduPilot开源代码之MatekSys Optical Flow 3901-L0X
1. 源由
之前介绍过MatekSys Optical Flow 3901-L0X模块:
【1】传感模块:MATEKSYS Optical Flow & LIDAR 3901-L0X
【2】iNavFlight之MSP v2 Sensor报文格式
当时主要是在inav固件上进行测试,整体感觉效果一般。
鉴于本次打算将电传模块换到VTOL飞机上去飞固定翼,
【1】Ardupilot开源飞控之VTOL之旅:配件规格
【2】Ardupilot开源飞控之VTOL之旅:配件试装
所以借着这个机会,将MatekSys Optical Flow 3901-L0X替换Mark4的电传,看下Ardupilot效果如何?
2. 安装
- 电源供电5V
- UART4_Tx/UART4_Rx用于通信
- 安装方法参考:传感模块:MATEKSYS Optical Flow & LIDAR 3901-L0X
3. 参数配置
3.1 配置光流定位
FLOW_TYPE = 7 (MSP)
FLOW_FXSCALER = -800
FLOW_FYSCALER = -800
SERIAL4_PROTOCOL = 32 (MSP)
SERIAL4_BAUD = 115 (115200 bps)
3.2 配置激光测距
RNGFND1_TYPE = 32 (MSP)
RNGFND1_MIN_CM = 8 to set range finder’s minimum range to 0.08m
RNGFND1_MAX_CM = 200 to set range finder’s maximum range to 2m
RNGFND1_ORIENT = 25 (Facing Down)
注:文档中不推荐使用这颗板载的激光测距传感,可能是测量距离太近(0~2m),或者数据的稳定性受到环境影响较大。
3.3 辅助配置
-
FlowHold飞行模式下,仅需提供:光流位置信息。
-
定位优化:(GPS/IMU/OpticalFlow在15cm距离以内,通常对性能没有影响);距离重心的位置;
Optical Flow
FLOW_POS_X, FLOW_POS_Y, FLOW_POS_Z
FLOW_POS_X = 0.05 set to 5 cm forward
FLOW_POS_Y = 0
FLOW_POS_Z = 0
IMU
INS_POS1_X, INS_POS1_Y, INS_POS1_Z
INS_POS2_X, INS_POS2_Y, INS_POS2_Z
INS_POS3_X, INS_POS3_Y, INS_POS3_Z
GPS
GPS_POS1_X, GPS_POS1_Y, GPS_POS1_Z
GPS_POS2_X, GPS_POS2_Y, GPS_POS2_Z
Range Finder (Sonar or Lidar)
RNGFND1_POS_X, RNGFND1_POS_Y, RNGFND1_POS_Z
RNGFND2_POS_X, RNGFND2_POS_Y, RNGFND2_POS_Z
Visual Odometry
VISO_POS_X, VISO_POS_Y, VISO_POS_Z
4. 测试
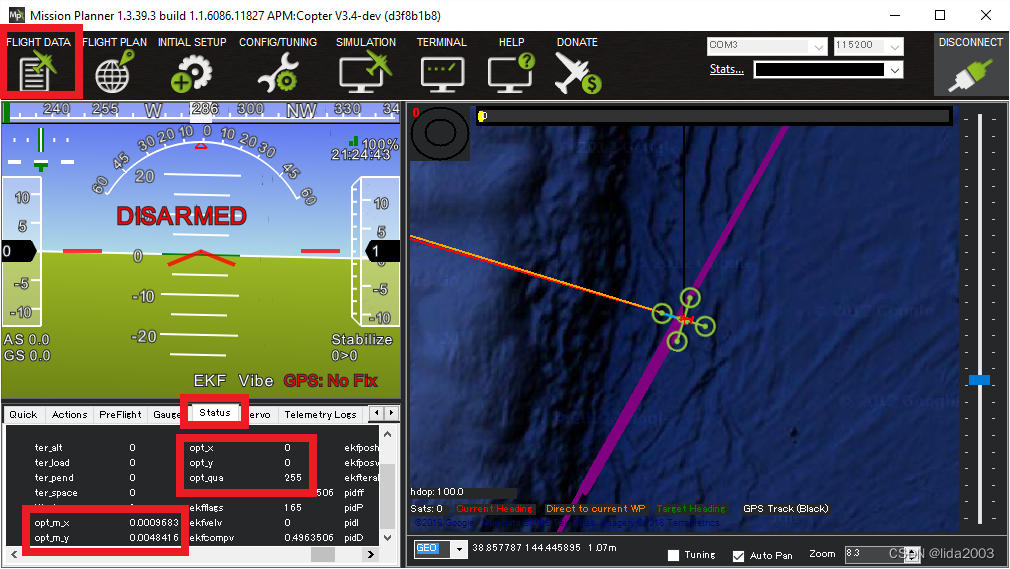
4.1 光流数据测试
opt_m_x,opt_m_y,opt_qua显示非零值,持续跳动。
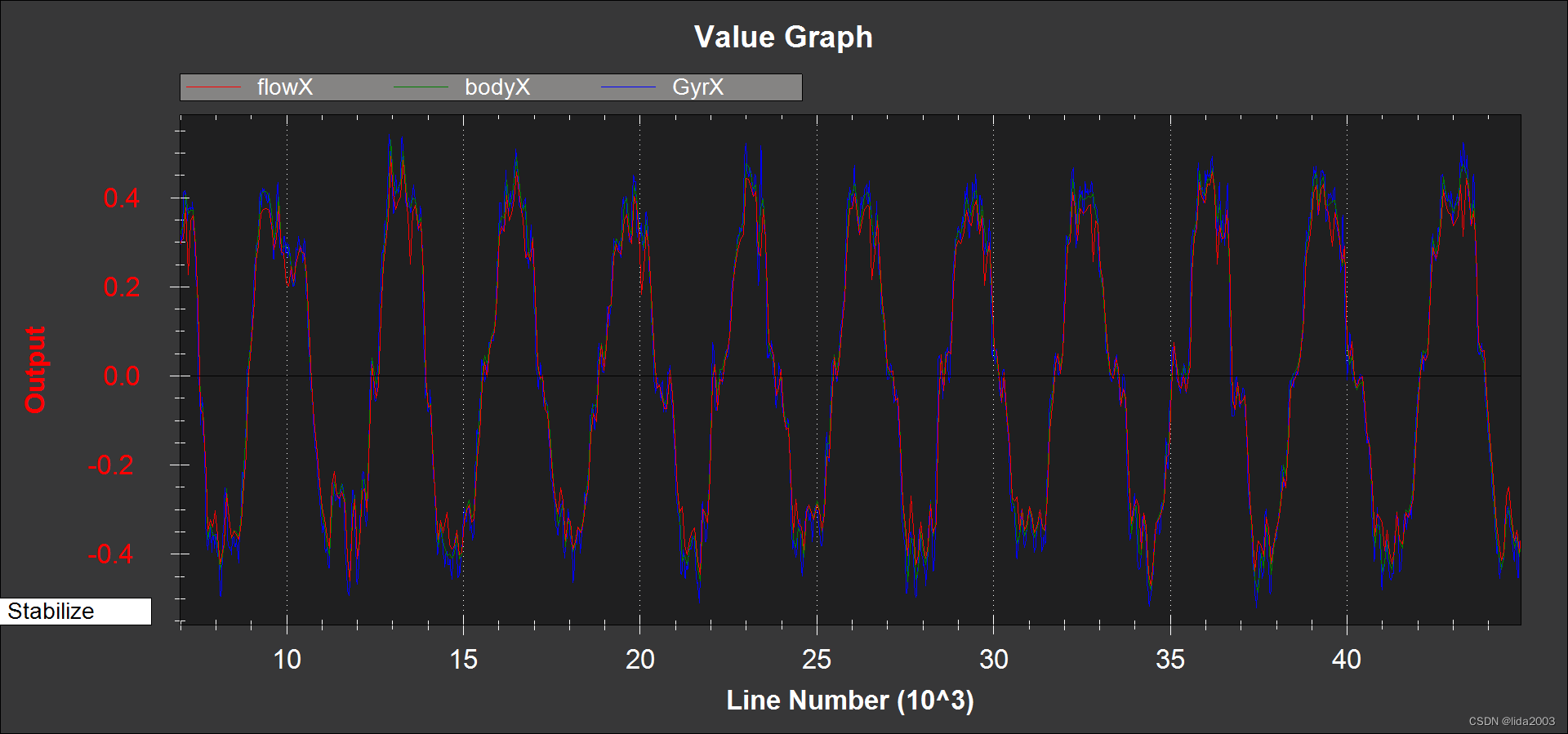
OF.flowX,OF.bodyX,IMU.GyrX趋势和大小基本一致
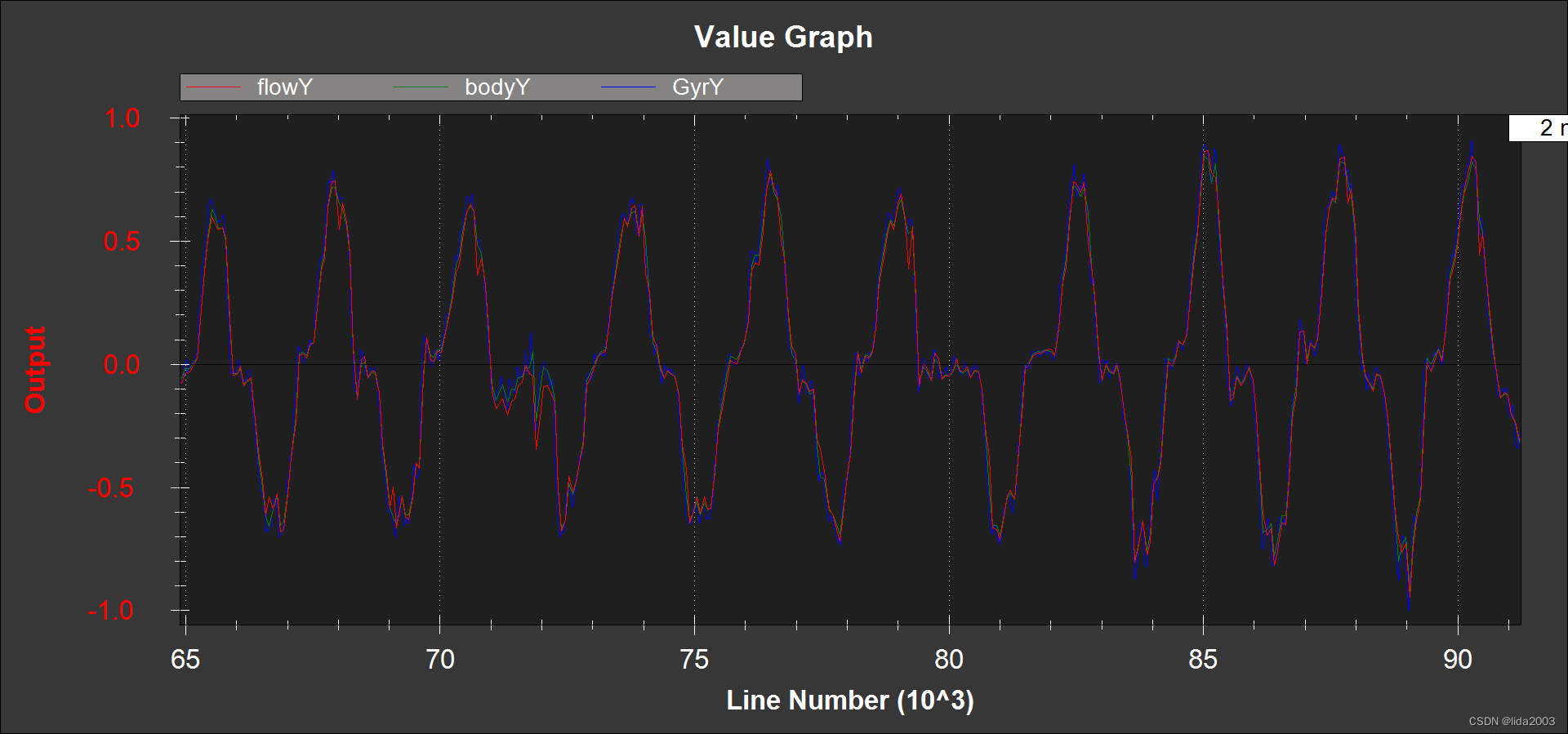
OF.flowY,OF.bodyY,IMU.GyrY趋势和大小基本一致
4.2 测距数据测试
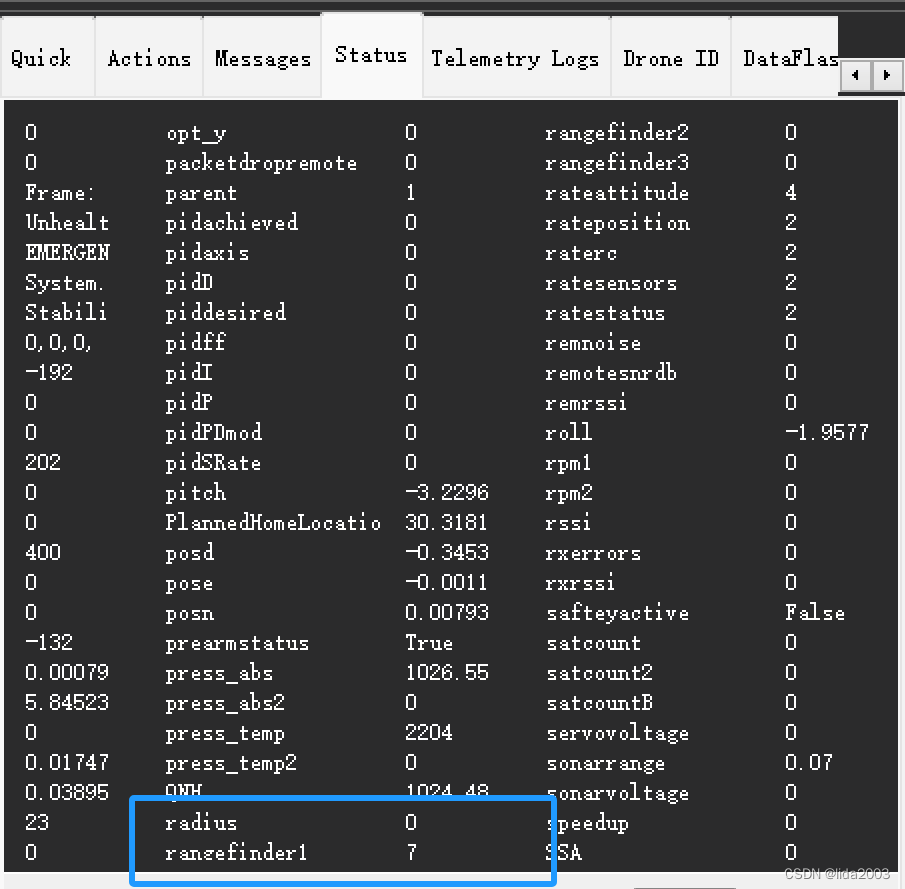
- 状态栏
rangefinder1不为零,且随着姿态、高度变化,数值缓慢线性变化。
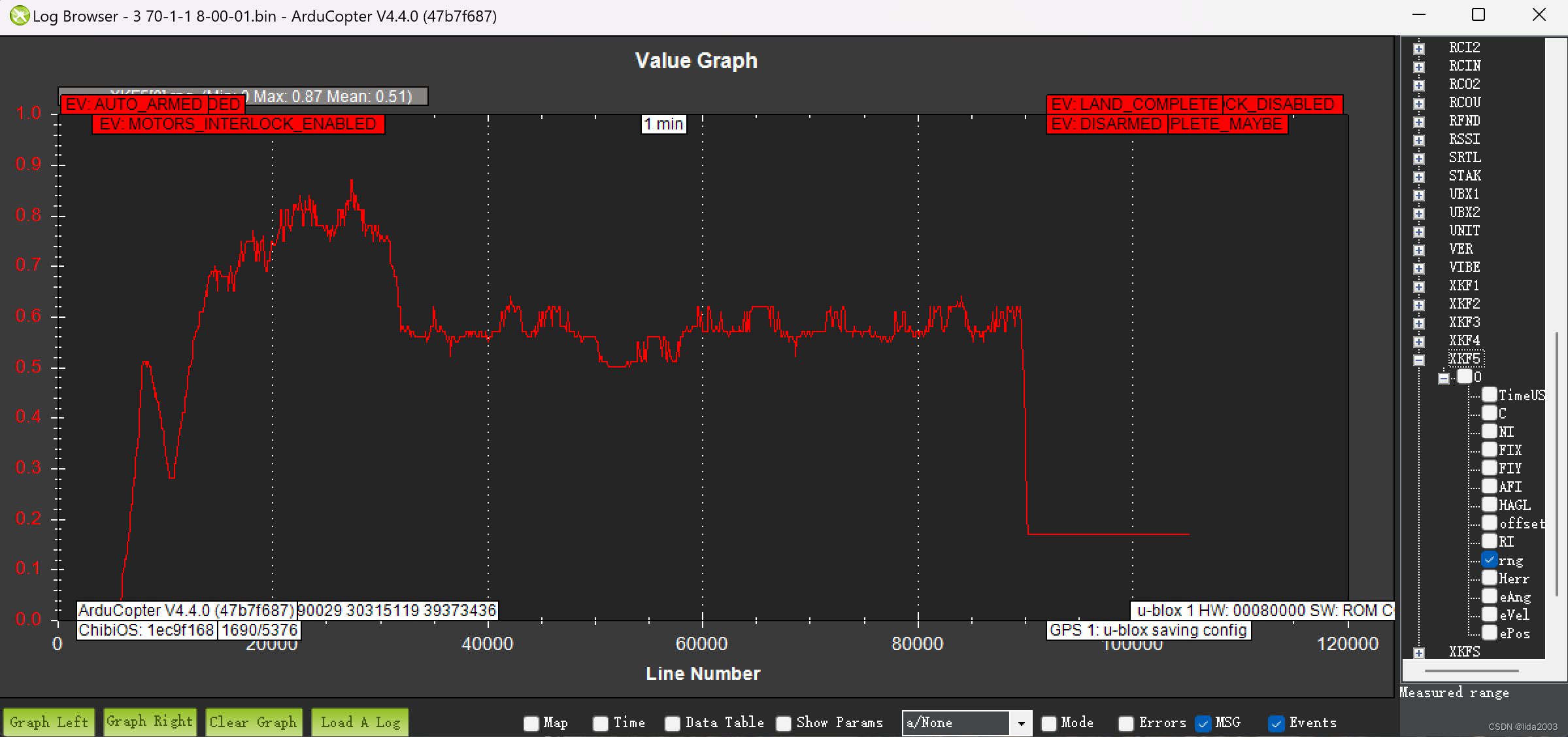
- 检查日志数据
EKF5.meaRng,最新4.4.0固件XKF5.rng
4.3 室内飞行注意事项
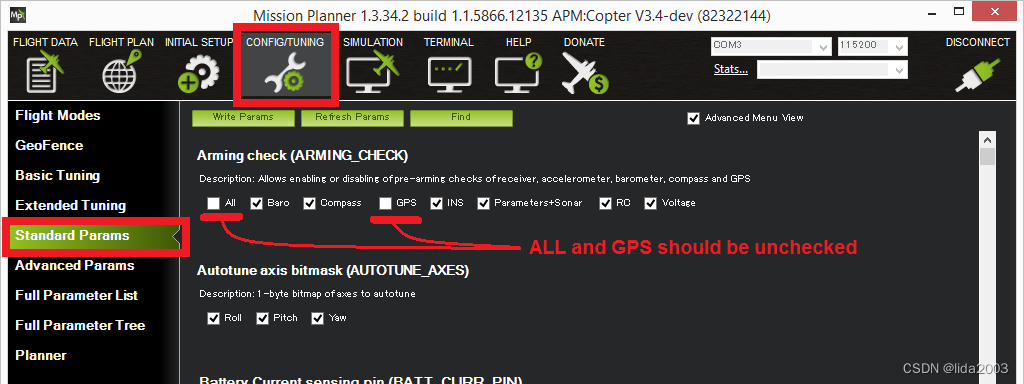
飞行预检查,取消GPS检查项。
4.4 实际飞行测试
Ardupilot 4.4.0 Mark4 + MatekSys Optical Flow 3901-L0X + FlowHold
对比iNav光流悬停,详见:传感模块:MATEKSYS Optical Flow & LIDAR 3901-L0X
iNav
5. 参考资料
【1】传感模块:MATEKSYS Optical Flow & LIDAR 3901-L0X
【2】iNavFlight之MSP v2 Sensor报文格式
【3】MatekSys Optical Flow 3901-L0X
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Ubuntu安装百度网盘
- RHEL防火墙配置
- 如何确保分布式环境下消息的顺序消费
- 基于SpringBoot和微信小程序的农场信息管理系统
- 分享下一这几天的部分JS代码练习题吧,浅看小试牛刀一下吧
- 隐藏通信隧道技术——防御SSH隧道攻击的思路
- 编写RedisUtil来操作Redis
- 快速处理EDI数据映射:知行EDI Profiler 操作指南
- Vue-Pinina基本教程
- 大创项目推荐 深度学习YOLOv5车辆颜色识别检测 - python opencv