PCL点云匹配 3 之 Point-to-Plane ICP
发布时间:2023年12月20日
一、概述
已经证明 Point -to-Plane 算法已经比Point-to-Point 的误差都要快更准确一些,在 ICP 算法的每次选代中,产生最小点到平面误差的相对位姿变化通常使用标准的非线性最小二乘法来解决。例如 Levenberg-Marquardt方法。当使用点到平面误差度量时,最小化的对象是每个源点与其对应目标点的切平面之间的平方距离之和。
二、原理介绍
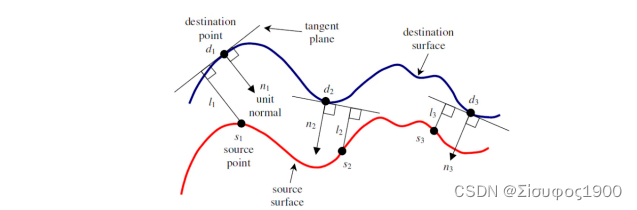
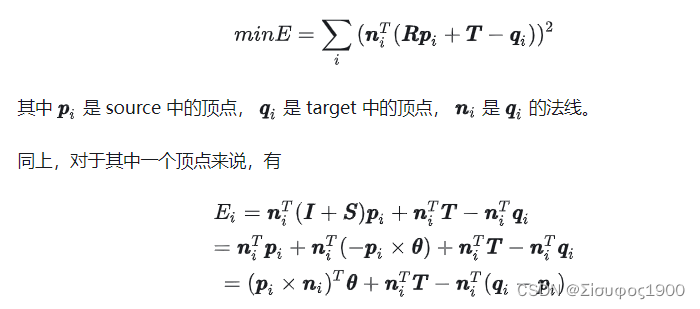
那么我们可以计算间距最小函数,即loss 函数
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
参数注释:
? ? ? ? ?R:表示的是旋转矩阵
? ? ? ? ?T:表示的是 平移矩阵
? ? ? ? ?Pi: 表示的是soruce 点云
? ? ? ? ?Qi:表示的是target 点云
? ? ? ? ?Ni:表示的是target点云该点对于的法向量
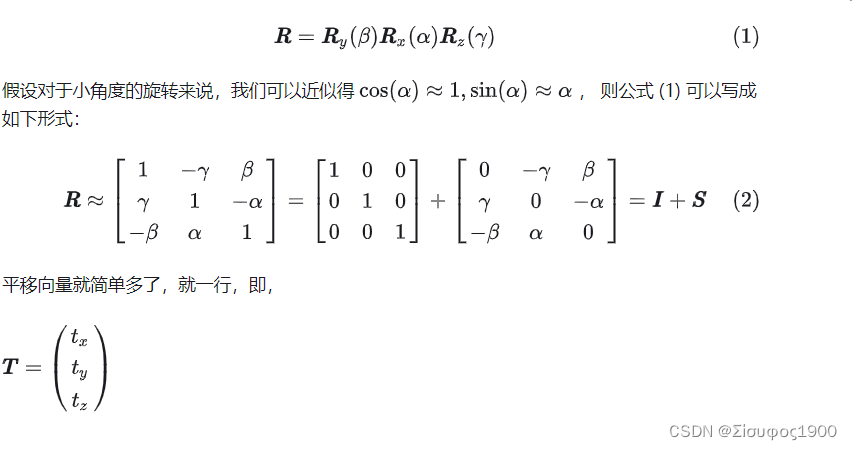
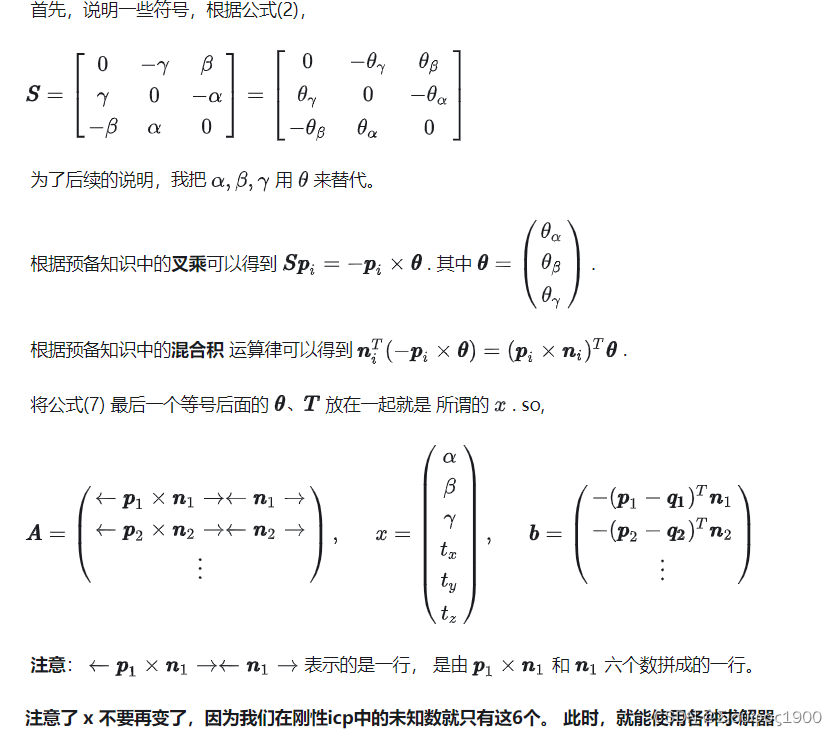
?推导:
点云配准: 刚性ICP中 Point-to-Point 和 Point-to-Plane 公式推导 ==> 帮助你代码实现 - 知乎
准备1?
?
? ? ? ? ? ? ? ? ? ? ?
?
?
点云刚性配准:point2point 和 point2plane 代码 - 知乎
void ICP::point2plane(float weight, Eigen::MatrixXf& A, Eigen::VectorXf& b)
{
A.resize(m_srcOfPair.size(), 6);
b.resize(m_srcOfPair.size());
for (int j = 0; j < m_srcOfPair.size(); j++)
{
Eigen::Vector3f sourceCoordinates;
sourceCoordinates = m_srcOfPair[j];
Eigen::Vector3f targetCoordinates;
targetCoordinates = m_targetOfPair[j];
Eigen::Vector3f targetNormal;
targetNormal = m_targetNormalsOfPair[j];
//两个向量的叉乘结果是一个向量(三个数)
Eigen::Vector3f sourceMultiplyNormal;
sourceMultiplyNormal = sourceCoordinates.cross(targetNormal);
A(j, 0) = sourceMultiplyNormal[0];
A(j, 1) = sourceMultiplyNormal[1];
A(j, 2) = sourceMultiplyNormal[2];
A(j, 3) = targetNormal[0];
A(j, 4) = targetNormal[1];
A(j, 5) = targetNormal[2];
b[j] = -(((sourceCoordinates - targetCoordinates).transpose()).dot(targetNormal));
}
A *= weight;
b *= weight;
}? ? ? ? ? ? ? ? ? ? ? ? ? ??
文章来源:https://blog.csdn.net/weixin_39354845/article/details/135109096
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- AI与5G、IDC等成为数字经济的重要基础设施
- 【制作100个unity游戏之23】实现类似七日杀、森林一样的生存游戏2(附项目源码)
- 【AD-3D预览-颜色更换和模型操作】AD打开3D预览模式,PCB板子显示蓝色,如何更改为绿色
- Flutter 混合开发 - aar打包
- 用JVS低代码实现业务流程的撤回和重新开始
- 基于SpringBoot的学校防疫物资管理平台
- IOS-数据持久化UserDefaults简单使用-Swift
- FlinkCDC的分析和应用代码
- 图像处理中,采用极线约束准则来约束特征点匹配搜索空间,理论上在极线上进行搜索。这里的极线是什么线,怎么定义的?基本矩阵F和本质矩阵E有什么区别?
- ESP32S3+ILI9225+8位并口220*176分辨率运行LVGL例程