飞凌官方手册中关于CAN测试部分使用的是命令行进行的简单测试,实际开发过程中还是要使用C代码去操作CAN设备,本帖主要讲解怎么使用C代码对CAN设备进行读写的收发操作。
First of all ,先查看所有网卡信息,看看板上是否有CAN设备网络:
root@ok113i:/# ifconfig -a
can0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
NOARP MTU:16 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:10
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
can1 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
NOARP MTU:16 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:10
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
Interrupt:1
eth0 Link encap:Ethernet HWaddr BA:E9:F2:1C:9D:87
inet addr:192.168.0.232 Bcast:0.0.0.0 Mask:255.255.255.0
inet6 addr: fe80::b8e9:f2ff:fe1c:9d87/64 Scope:Link
UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1
RX packets:421 errors:0 dropped:14 overruns:0 frame:0
TX packets:9 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:27272 (26.6 KiB) TX bytes:726 (726.0 B)
Interrupt:39
ip6tnl0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
NOARP MTU:1452 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
lo Link encap:Local Loopback
inet addr:127.0.0.1 Mask:255.0.0.0
inet6 addr: ::1/128 Scope:Host
UP LOOPBACK RUNNING MTU:65536 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
sit0 Link encap:IPv6-in-IPv4
NOARP MTU:1480 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
wlan0 Link encap:Ethernet HWaddr 2C:C3:E6:67:4D:3B
BROADCAST MULTICAST MTU:1500 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
使用如下命令分别设置CAN0和CAN1的通信速率:
root@ok113i:/home/forlinx# ip link set can0 up type can bitrate 500000
[ 4075.425084] IPv6: ADDRCONF(NETDEV_CHANGE): can0: link becomes ready
root@ok113i:/home/forlinx# ip link set can1 up type can bitrate 500000
[ 4086.037967] IPv6: ADDRCONF(NETDEV_CHANGE): can1: link becomes ready
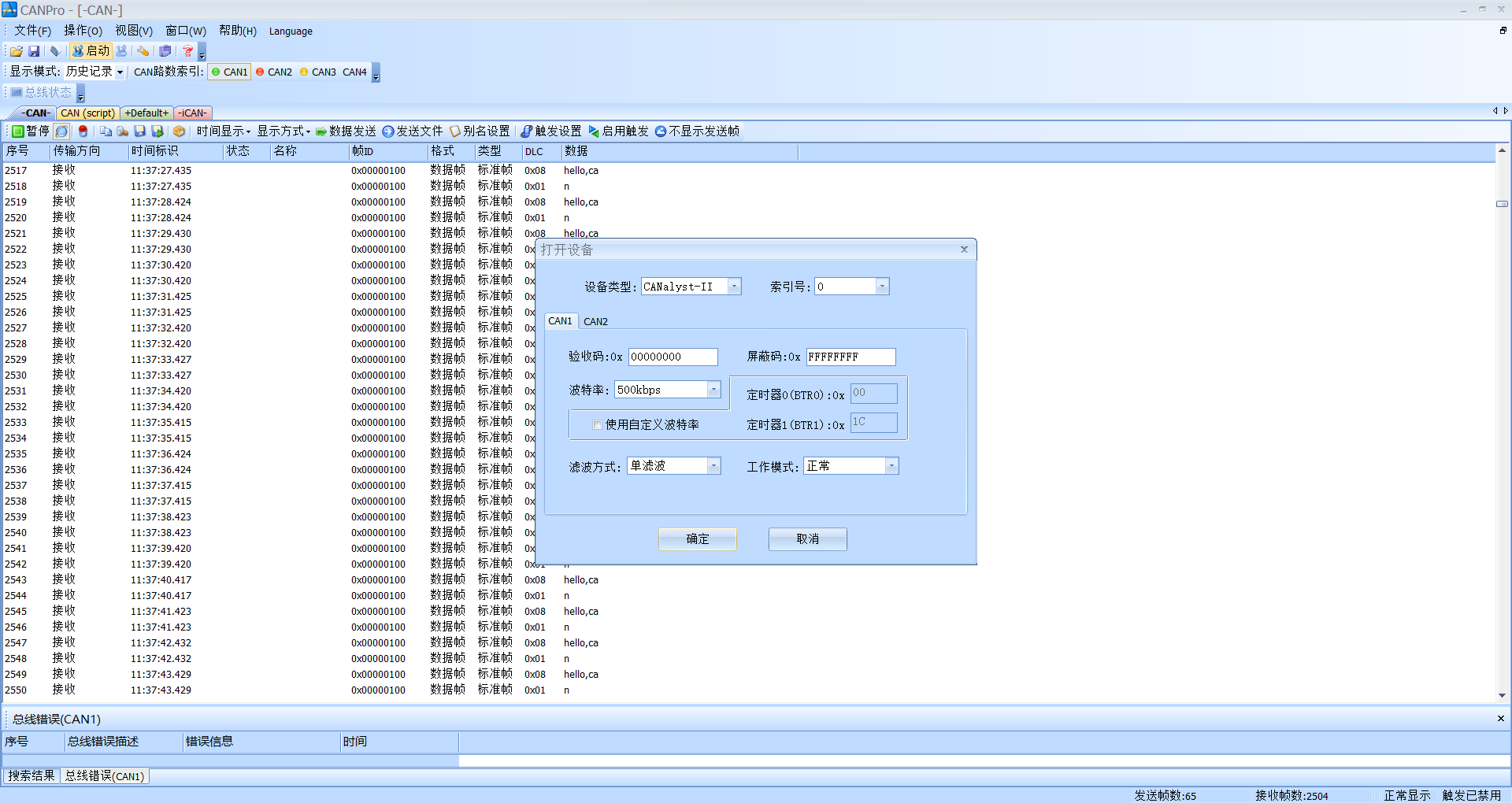
以上设置can0 和 can1 通信速率均为500kbps,这个速率值务必记住,所有接入组网的的can节点都是以这个速率通信。
#include <unistd.h>
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <signal.h>
#include <string.h>
#include "can_apply.h"
#define MASTR_CAN1_ID 0x100
#define MASTR_CAN2_ID 0x101
#define RX_MSG_NUM 16
#define MAX_BUF_LEN 64
typedef enum
{
CAN_1,
CAN_2,
CAN_RES
}can_type;
typedef struct{
int can_id;
unsigned char can_dlc;
unsigned char data[MAX_BUF_LEN];
}can_msg_t;
static int bexit = 0;
static int can0_sock,can1_sock;
can_msg_t can_rx_msg[RX_MSG_NUM];
unsigned int can1_id = 0;
unsigned int can2_id = 0;
void signal_handler(int signo)
{
printf("signal %d(%s) received\n", signo, strsignal(signo));
bexit = 1;
}
int can_send_data(can_type type, unsigned char *buf, int len)
{
int i, j;
int cnt;
int sock;
int ret = 0;
struct can_frame frame;
if(type == CAN_1)
{
sock = can0_sock;
frame.can_id = can1_id;
}
else {
sock = can1_sock;
frame.can_id = can2_id;
}
for(i = 0; i < len; i += 8)
{
cnt = len - i;
if(cnt > 8)
frame.can_dlc = 8;
else
frame.can_dlc = cnt;
for(j=0; j<frame.can_dlc; j++)
{
frame.data[j] = buf[i+j];
}
if(can_send(sock, frame) < 0)
{
ret = -1;
break;
}
}
return ret;
}
void can_recv_data(int sock)
{
static unsigned char tail = 0;
int i;
int can_id;
unsigned char can_dlc;
unsigned char *data;
struct can_frame frame;
int index = can0_sock == sock ? 0 : 1;
if(can_recv(sock, &frame) < 0)
return ;
can_id = frame.can_id;
can_dlc = frame.can_dlc;
data = frame.data;
printf("CAN%d dlc = %d, can_id = %x\ndata:", index,frame.can_dlc, frame.can_id);
for(i=0; i<frame.can_dlc; i++)
printf("0x%02x ", frame.data[i]);
printf("\n");
}
void *can_proc_start(void *arg)
{
int nready;
int maxfd;
fd_set readfds;
int sock = *(int *)arg;
FD_ZERO(&readfds);
FD_SET(sock, &readfds);
maxfd = sock;
while(!bexit)
{
nready = select(maxfd+1, &readfds, NULL, NULL, NULL);
if(nready < 0)
{
perror("can select");
break;
}
else if(nready == 0)
{
continue;
}
/* data is ready */
if(FD_ISSET(sock, &readfds))
{
can_recv_data(sock);
}
else { ; }
}
close(sock);
pthread_detach(pthread_self());
pthread_exit(0);
}
// 初始化CAN0和CAN1设备,并创建两个接收数据处理线程
static void can_sock_init()
{
pthread_t tid;
can0_sock = can_open("can0");
if(can0_sock < 0)
return ;
can1_sock = can_open("can1");
if(can1_sock < 0)
return ;
if (0 != pthread_create(&tid, NULL, can_proc_start, (void *)&can0_sock))
{
return ;
}
if (0 != pthread_create(&tid, NULL, can_proc_start, (void *)&can1_sock))
{
return ;
}
can1_id = MASTR_CAN1_ID;
can2_id = MASTR_CAN2_ID;
printf("can open sucess can0_sock:%d, can1_sock:%d\n", can0_sock, can1_sock);
}
int main(int argc, char *argv[])
{
char *send_data = "hello,can!";
signal(SIGINT, signal_handler);
signal(SIGPIPE, signal_handler);
signal(SIGTERM, signal_handler);
can_sock_init(); // 初始化CAN0和CAN1设备数据,并创建接收线程
do {
sleep(1);
can_send_data(CAN_1, (unsigned char *)send_data, strlen(send_data) - 1);
} while (!bexit);
return 0;
}
测试程序主要实现了如下功能:
PC上使用CAN分析工具按下图接好线
?编辑
打开CAN调试软件,配置成500kbps的速率并打开设备,如下:
?编辑
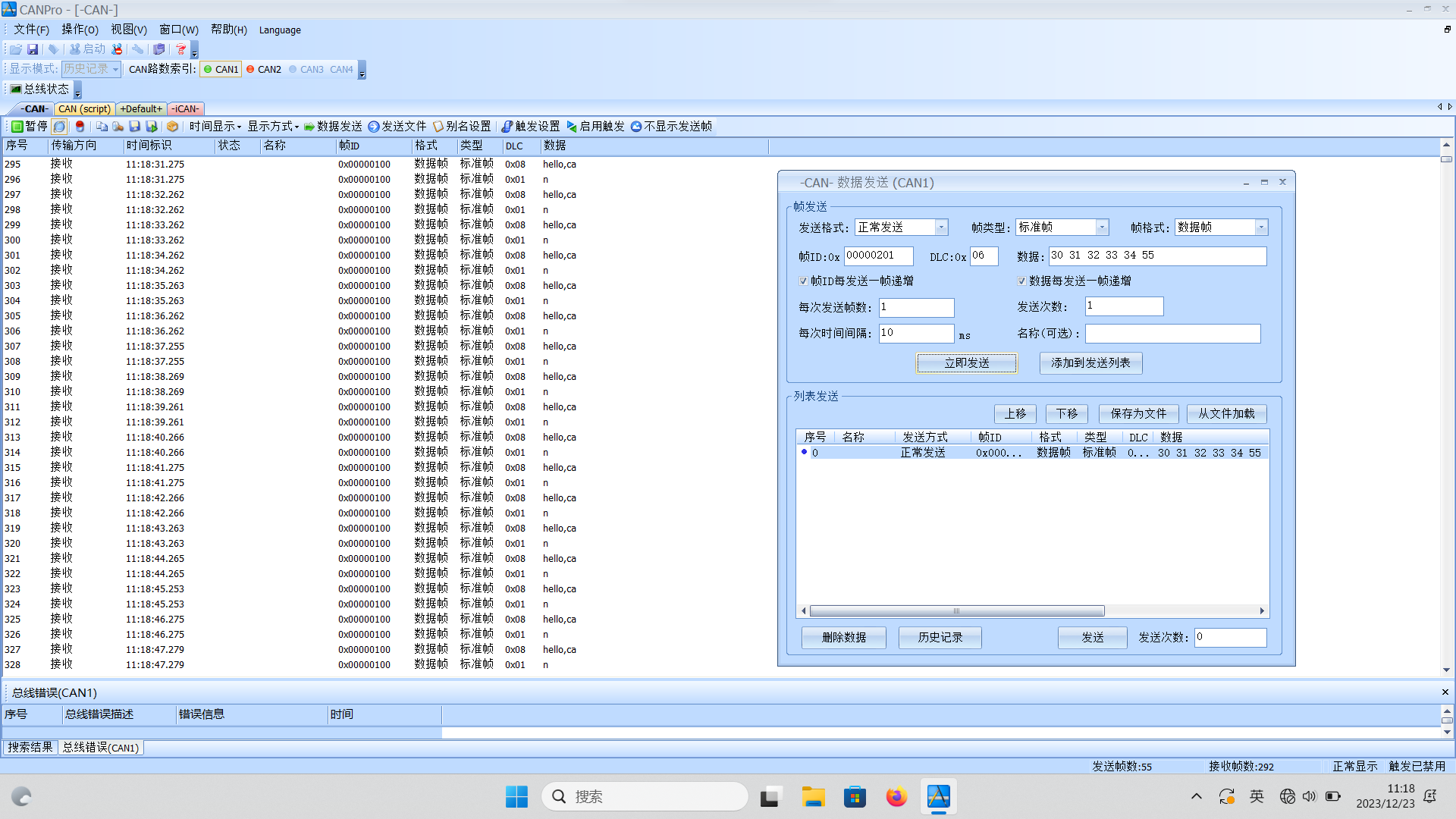
使用CAN调试软件给设备发送数据,如下:
?编辑
将编译好的程序上传到板子上并运行,以下是正常收到数据后程序的打印信息:
root@ok113i:/home/forlinx# ./can_test
can open sucess can0_sock:3, can1_sock:4
## PC往CAN0口发送测试数据接收打印
CAN0 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN0 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN0 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN0 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN0 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN0 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN0 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN0 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN0 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
## PC往CAN1 口发送测试数据接收打印
CAN1 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN1 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN1 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN1 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN1 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN1 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN1 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN1 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN1 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
CAN1 dlc = 6, can_id = 201
data:0x30 0x31 0x32 0x33 0x34 0x55
测试程序工程结构
├── build # 编译目录
├── can_apply.c # CAN 操作简单封装C源码
├── can_apply.h # CAN 操作简单封装头文件
├── CMakeLists.txt # cmake 编译规则文件
├── cross-t113-i.cmake # CMake嵌入式交叉编译工具链文件
└── main.c # 测试程序主体源代码
工程源代码编译
cd build
cmake .. -DCMAKE_TOOLCHAIN_FILE=../cross-t113-i.cmake
make
Scanning dependencies of target can_test
[ 33%] Building C object CMakeFiles/can_test.dir/main.c.o
[ 66%] Building C object CMakeFiles/can_test.dir/can_apply.c.o
[100%] Linking C executable can_test
[100%] Built target can_test
工程使用cmake进行编译,需要注意的是要根据实际情况修改cross-t113-i.cmake中的GCC交叉编译工具的路径。
#
# CMake Toolchain file for crosscompiling on ARM.
#
# This can be used when running cmake in the following way:
# cd build-t113/
# cmake .. -DCMAKE_TOOLCHAIN_FILE=../cross-t113-i.cmake
# or
set(CROSS_PATH /home/luoyang/Dev/sdk/T113-i/OK113i-linux-sdk/out/t113_i/ok113i/longan/buildroot/host)
# Target operating system name.
set(CMAKE_SYSTEM_NAME Linux)
set (CMAKE_C_FLAGS "-std=gnu11" CACHE STRING "Set C Compiler Flags" FORCE)
# Name of C compiler.
set(CMAKE_C_COMPILER "${CROSS_PATH}/bin/arm-linux-gnueabi-gcc")
set(CMAKE_CXX_COMPILER "${CROSS_PATH}/bin/arm-linux-gnueabi-g++")
set (CMAKE_C_FLAGS "-std=gnu11 -mcpu=cortex-a7 -mfloat-abi=softfp -mfpu=neon-vfpv4 -mno-unaligned-access -fno-aggressive-loop-optimizations -ffunction-sections" CACHE STRING "Set C Compiler Flags" FORCE)
set (CMAKE_CXX_FLAGS "-mcpu=cortex-a7 -mfloat-abi=softfp -mfpu=neon-vfpv4 -mno-unaligned-access -fno-aggressive-loop-optimizations -ffunction-sections" CACHE STRING "Set C++ Compiler Flags" FORCE)
# link flags
set(CMAKE_LINK_FLAGS "${CMAKE_LINK_FLAGS} -mcpu=cortex-a7 -mfloat-abi=softfp -mfpu=neon-vfpv4 -mno-unaligned-access -fno-aggressive-loop-optimizations" CACHE STRING "Set link Flags" FORCE)
SET(CMAKE_SYSTEM_PROCESSOR "armv7-a_hardfp")
add_definitions(-fPIC)
add_definitions(-DARMLINUX)
add_definitions(-D__gnu_linux__)
# Where to look for the target environment. (More paths can be added here)
set(CMAKE_FIND_ROOT_PATH "${CROSS_PATH}/arm-buildroot-linux-gnueabi/sysroot")
# Adjust the default behavior of the FIND_XXX() commands:
# search programs in the host environment only.
set(CMAKE_FIND_ROOT_PATH_MODE_PROGRAM NEVER)
# Search headers and libraries in the target environment only.
set(CMAKE_FIND_ROOT_PATH_MODE_LIBRARY ONLY)
set(CMAKE_FIND_ROOT_PATH_MODE_INCLUDE ONLY)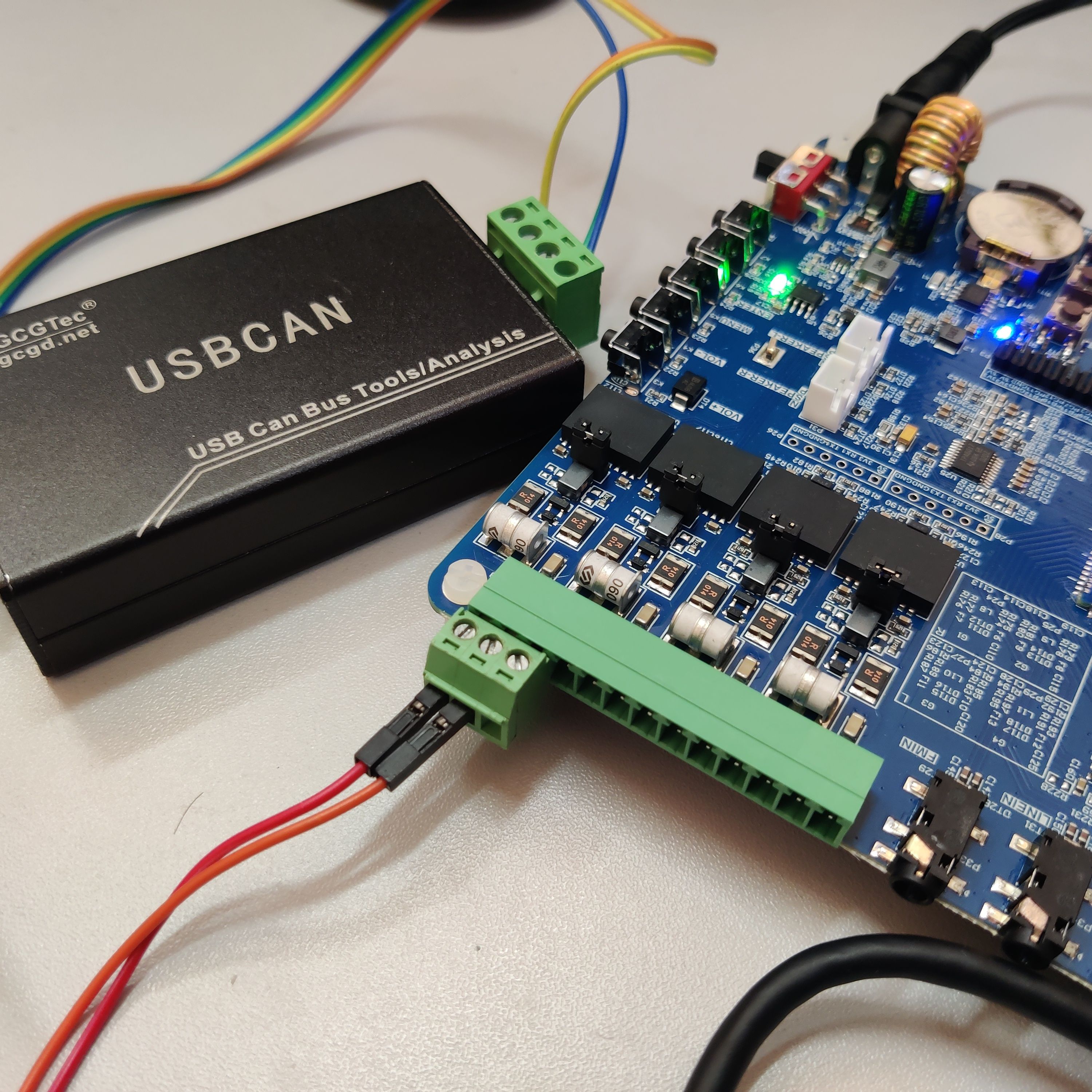{kind=link}
{kind=link}
{kind=link}