VGG网络分析与demo实例
发布时间:2023年12月25日
参考自?
- up主的b站链接:霹雳吧啦Wz的个人空间-霹雳吧啦Wz个人主页-哔哩哔哩视频
- 这位大佬的博客?Fun'_机器学习,pytorch图像分类,工具箱-CSDN博客
VGG 在2014年由牛津大学著名研究组?VGG(Visual Geometry Group)提出,斩获该年 ImageNet 竞赛中 Localization Task(定位任务)第一名和 Classification Task(分类任务)第二名。
VGG 的创新点:
通过堆叠多个小卷积核来替代大尺度卷积核,可以减少训练参数,同时能保证相同的感受野。
论文中提到,可以通过堆叠两个3×3的卷积核替代5x5的卷积核,堆叠三个3×3的卷积核替代7x7的卷积核
1. CNN感受野
在卷积神经网络中,决定某一层输出结果中一个元素所对应的输入层的区域大小,被称作感受野(receptive field)。
通俗的解释是,输出feature map上的一个单元 对应 输入层上的区域大小。
以下图为例,输出层 layer3 中一个单元 对应 输入层 layer2 上区域大小为2×2(池化操作),对应输入层 layer1 上大小为5×5
(可以这么理解,layer2中 2×2区域中的每一块对应一个3×3的卷积核,又因为 stride=2,所以layer1的感受野为5×5)
?


现在,我们来验证下VGG论文中的两点结


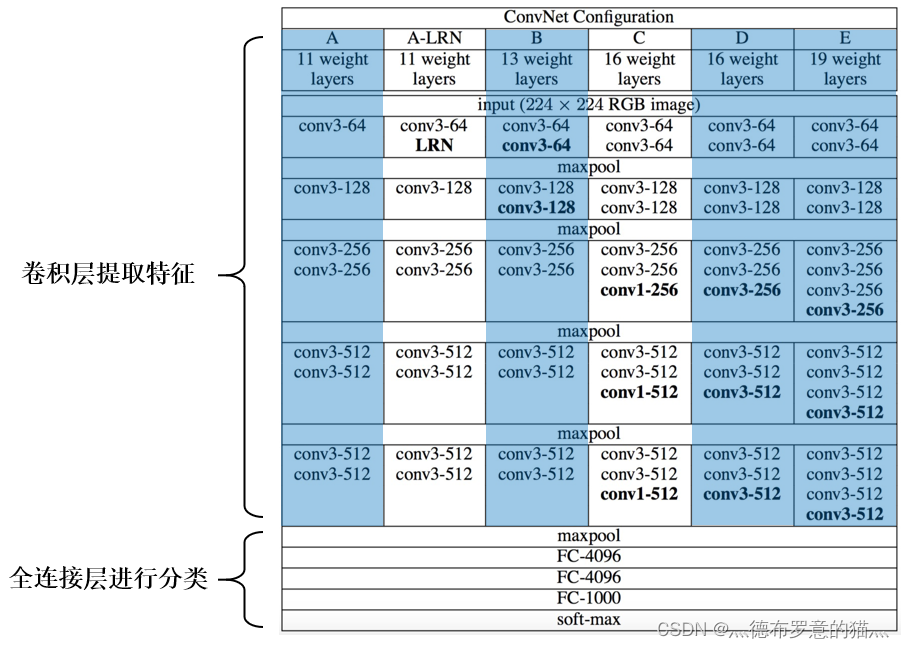
VGG网络有多个版本,一般常用的是VGG-16模型,其网络结构如下如所示:


pytorch搭建VGG网络
import torch.nn as nn
import torch
class VGG(nn.Module):
def __init__(self, features, num_classes=1000, init_weights=False):
super(VGG, self).__init__()
self.features = features # 卷积层提取特征
self.classifier = nn.Sequential( # 全连接层进行分类
nn.Dropout(p=0.5),
nn.Linear(512*7*7, 2048),
nn.ReLU(True),
nn.Dropout(p=0.5),
nn.Linear(2048, 2048),
nn.ReLU(True),
nn.Linear(2048, num_classes)
)
if init_weights:
self._initialize_weights()
def forward(self, x):
# N x 3 x 224 x 224
x = self.features(x)
# N x 512 x 7 x 7
x = torch.flatten(x, start_dim=1)
# N x 512*7*7
x = self.classifier(x)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
# nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
nn.init.xavier_uniform_(m.weight)
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.xavier_uniform_(m.weight)
# nn.init.normal_(m.weight, 0, 0.01)
nn.init.constant_(m.bias, 0)
这里有一点需要注意的是:
VGG网络有 VGG-13、VGG-16等多种网络结构
# vgg网络模型配置列表,数字表示卷积核个数,'M'表示最大池化层
cfgs = {
'vgg11': [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'], # 模型A
'vgg13': [64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'], # 模型B
'vgg16': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'], # 模型D
'vgg19': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 256, 'M', 512, 512, 512, 512, 'M', 512, 512, 512, 512, 'M'], # 模型E
}
# 卷积层提取特征
def make_features(cfg: list): # 传入的是具体某个模型的参数列表
layers = []
in_channels = 3 # 输入的原始图像(rgb三通道)
for v in cfg:
# 最大池化层
if v == "M":
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
# 卷积层
else:
conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1)
layers += [conv2d, nn.ReLU(True)]
in_channels = v
return nn.Sequential(*layers) # 单星号(*)将参数以元组(tuple)的形式导入
def vgg(model_name="vgg16", **kwargs): # 双星号(**)将参数以字典的形式导入
try:
cfg = cfgs[model_name]
except:
print("Warning: model number {} not in cfgs dict!".format(model_name))
exit(-1)
model = VGG(make_features(cfg), **kwargs)
return model
train.py
model_name = "vgg16"
net = vgg(model_name=model_name, num_classes=5, init_weights=True)
文章来源:https://blog.csdn.net/m0_60921016/article/details/135179073
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- MyBatis Plus轻松实现数据读写分离
- 数据库系统原理例题之——目录
- 高性能国产TYPE-C/DP/EDP转MIPIDSI/CSI/LVDS,龙迅LT7911D,支持高达4K60HZ的分辨率
- C#多条件排序OrderBy、ThenBy
- 【HttpRunner】接口自动化测试框架
- 《Cesium 基础知识点》- 相机最近和最远距离设置
- 解释Keil-MDK中Code、RO-data、RW-data、ZI-data
- 谷歌colab测试diffusers
- 【数据库】
- Qmap应用大全