AirSim 的 ROS 功能包测试
发布时间:2024年01月10日
?参考链接:
Ubuntu18.04搭建AirSim+ROS仿真环境_airsim ros-CSDN博客
ROS: AirSim ROS Wrapper - AirSim
1.编译 ros 包(必须是 gcc-8)
如果您的默认 GCC 不是 8 或更高(使用 gcc --version 检查),那么编译将失败。在这种情况下,请明确使用 gcc-8,如下所示--
cd ros
catkin build -DCMAKE_C_COMPILER=gcc-8 -DCMAKE_CXX_COMPILER=g++-8
此处编译的时候报错的话参考:
Ubuntu 20.04 + UE4.27 + Airsim + ROS 学习(2)(显卡rtx 4060+双系统)_ros airsim ubuntu-CSDN博客解决 ubuntu 下编译文件的时候与 YAML 相关的的报错-CSDN博客
2.更新环境变量
source devel/setup.bash3.测试
更新环境变量后运行
roslaunch airsim_ros_pkgs airsim_node.launch
不报错
必须先 catkin build,再 source,再 roslaunch
必须关掉上一个 roslaunch,再打开下一个 roslaunch
然后再运行
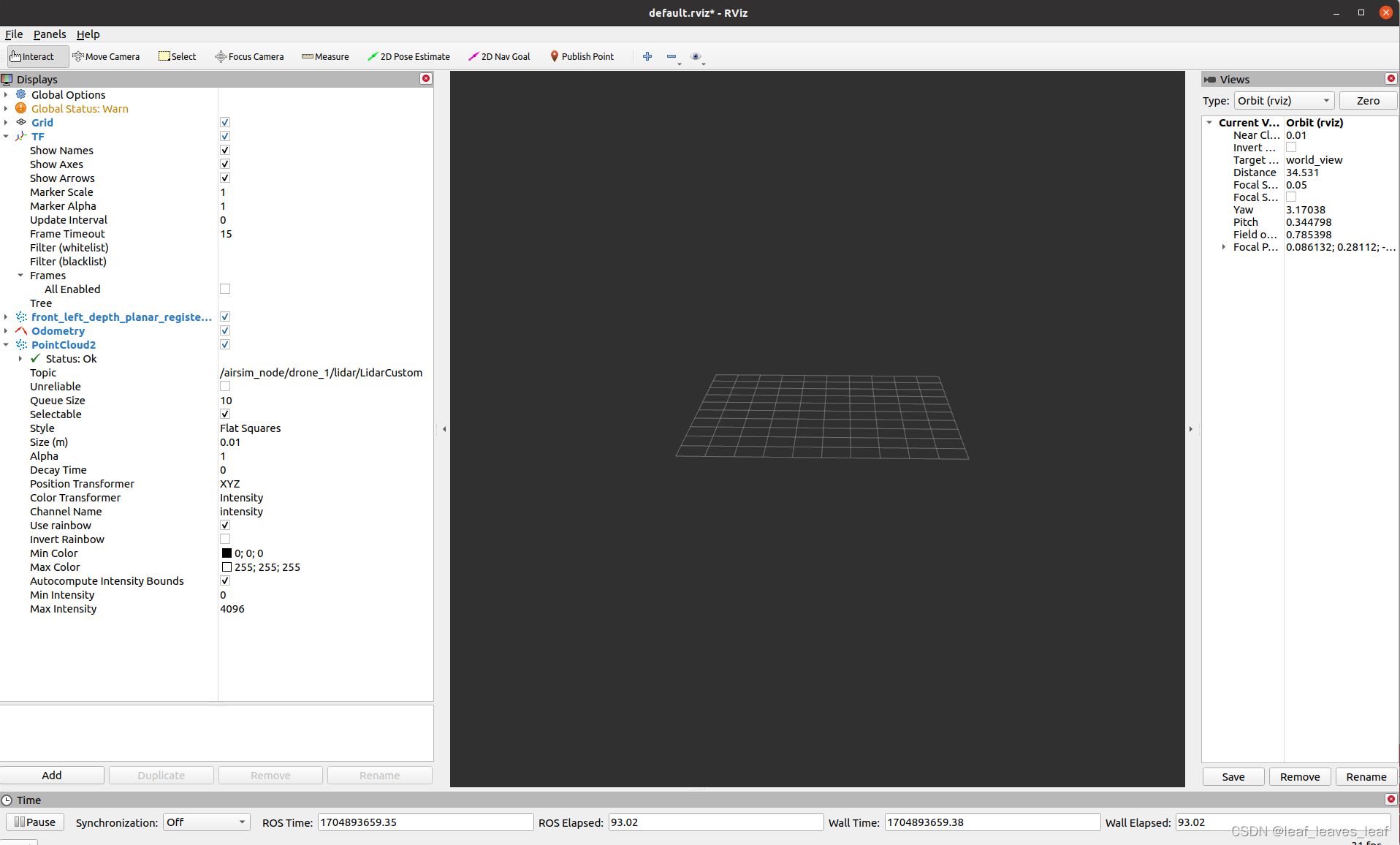
roslaunch airsim_ros_pkgs rviz.launch
每次都要 source 一下
成功打开 rviz
注意:
下面的 source 是 source 整个 ros,每次编译前都要 source
source /opt/ros/noetic/setup.bash但是一般安装 ros 的时候就把环境变量写入 .bashrc 中了,如下

下面的是 source 自己项目的工作空间的 ros,每次进行catkin_make编译完成后必须使用 source 命令刷新一下工作空间的环境,后面进行package创建时,当加入了新的package编译完成后,也要进行source 刷新环境,否则会出现找不到“package XXX not found” 的问题

source devel/setup.bashsource 参考链接:
ROS创建工作空间和source的解释_ros source命令-CSDN博客
文章来源:https://blog.csdn.net/qq_64671439/article/details/135513467
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 安泰ATA-2082高压放大器如何驱动超声探头进行无损检测
- multipath 内核接口及框架介绍
- 【SAP-FICO】--总账标识配置路径OBXR
- 【快速全面掌握 WAMPServer】14.各种组件的升级方法
- 计算机网络面试题目
- 赛宁综合安全验证评估,筑牢关基网络安全屏障
- 如何在 Python 3 中使用算术运算符
- Python有优点有哪些 为什么近些年使用的人越来越多
- 数据链路层——笔记·续
- ZooKeeper 实战(二) 命令行操作篇