基于Matlab/Simulink开发自动驾驶的解决方案
文章目录
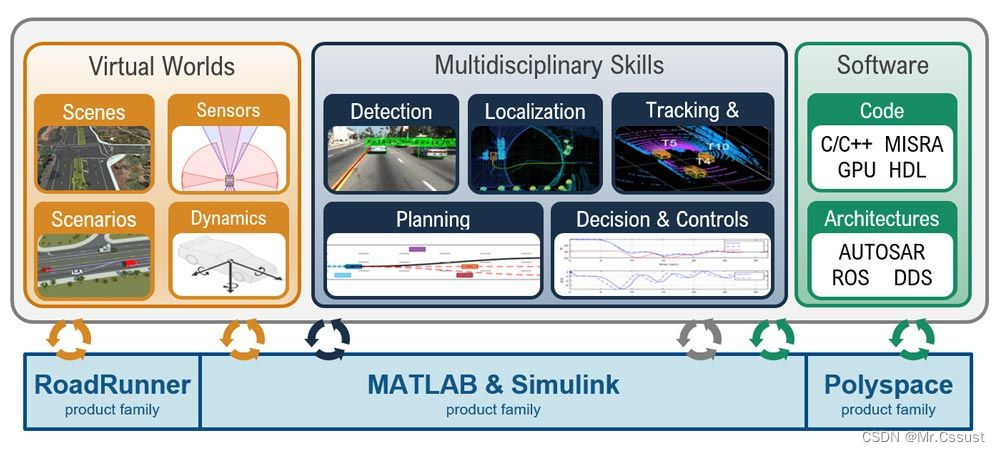
????????使用 MATLAB/Simulink开发自动驾驶,能够深入建模真实世界的行为、减少车辆测试并验证嵌入式软件的功能,从而推进自动驾驶感知、规划和控制系统的设计。主要包括以下几个方面的工作:
处理自动驾驶数据
??????? 使用MATLAB的 CAN 和 ROS接口访问实时的或者Record的驾驶数据。使用内置工具,可以可视化和标注导入的数据。例如,真值标注器界面能够可视化信号,并支持您以交互方式标注多个信号,也可以自动标注这些信号,并将标注的数据导出到工作区。地理地图方面的数据访问和可视化,需要配合使用 HERE 高清实时地图和 OpenStreetMap。数据处理的示例如下:

仿真自动驾驶场景
????????MATLAB与立方体以及虚幻引擎 (Unreal Engine) 仿真环境结合使用,可以在虚拟场景中开发和测试算法。立方体环境将交通参与者表示为简单图形,并使用概率传感器模型。可以将此环境用于控制、传感器融合和运动规划。
????????使用虚幻引擎环境,可以为感知和立方体环境用例开发算法。RoadRunner 可以支持自己设计仿真器中使用的场景,包括 CARLA、Vires VTD 和 NVIDIA Drive Sim等,并支持导出为行业标准文件格式,如 FBX 和 OpenDRIVE。设计驾驶场景的示例如下:

设计感知算法
????????MATLAB 和 Simulink可以使用来自相机、激光雷达和雷达的数据开发感知算法。感知算法包括检测、跟踪和定位,可用于自动制动、转向、地图构建和里程计等应用。还可以将这些算法作为 ADAS 应用的一部分来实现,如紧急制动和转向。使用 MATLAB,还可以开发用于传感器融合、同步定位与地图构建 (SLAM)、地图构建和里程计的算法。示例如下:

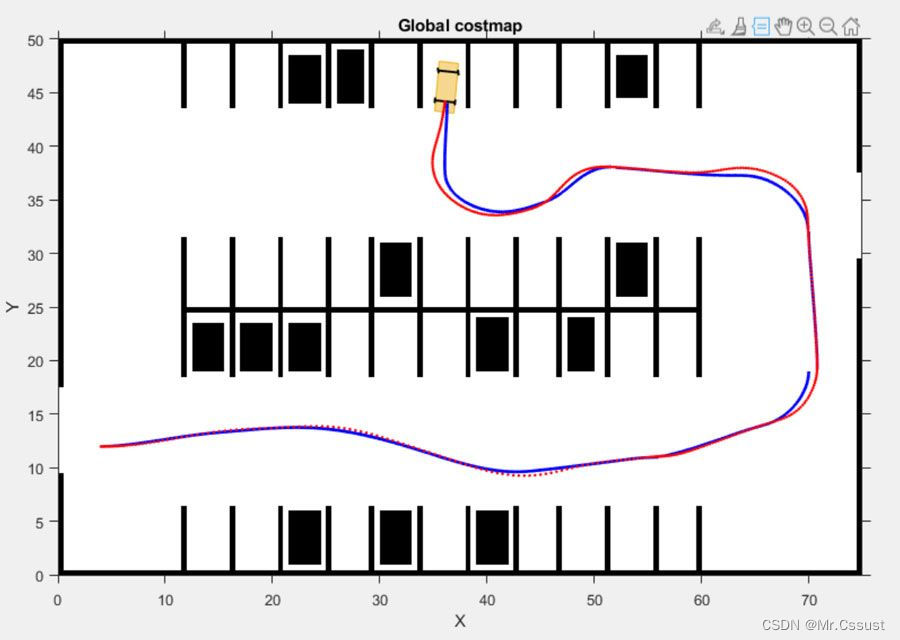
设计规划和控制算法
????????使用 MATLAB 和 Simulink,可以开发路径规划和控制算法。例如使用横向和纵向控制器设计车辆控制系统,使自主驾驶车辆能够遵循规划的轨迹。还可以使用传感器模型和车辆动力学模型,在二维和三维仿真环境中合成式地测试自己开发的算法。示例如下:
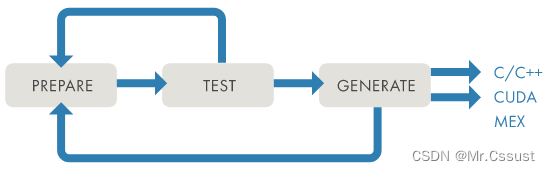
生成代码和部署算法
????????使用MATLAB 和 Simulink的代码生成工作流可以将感知、规划和控制算法部署到硬件。使用自动生成的代码,可以将传感器与其他 ECU 组件连接。支持多种部署目标,包括 NVIDIA、Intel、ARM 等品牌硬件。支持的代码生成语言包括 C、C++、CUDA、Verilog 和 VHDL?。也可以将算法部署到面向服务的架构中,如 ROS 和 AUTOSAR。示例如下:
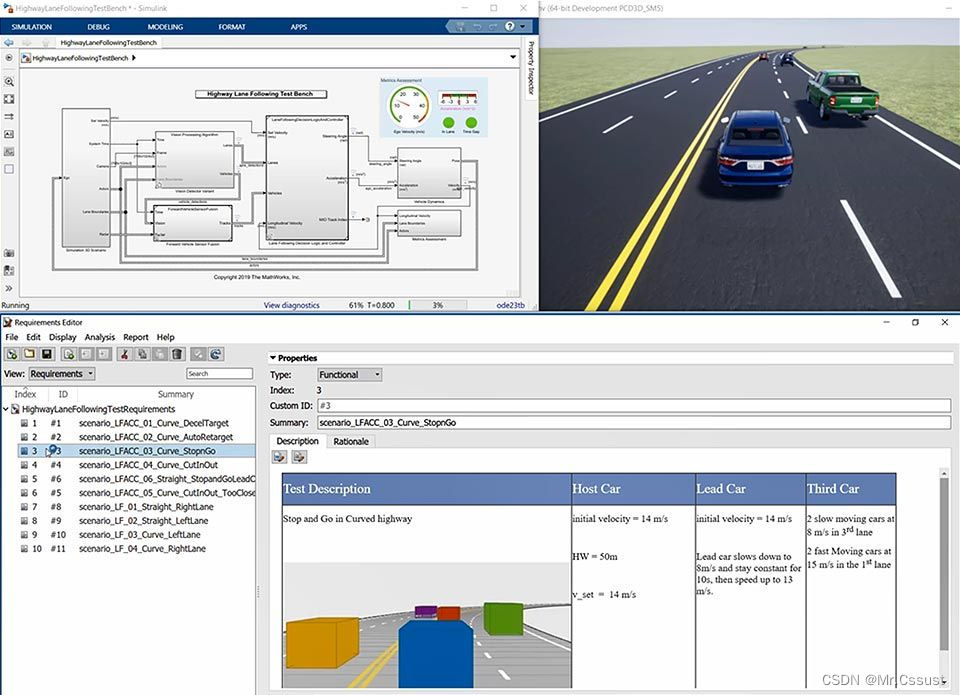
集成和测试
????????使用MATLAB 和 Simulink可以集成并测试自己开发的感知、规划和控制系统。使用 Requirements Toolbox,还可以提取和管理开发需求。也可以使用 Simulink Test 以并行方式运行和自动化测试用例。示例如下:
参考文献
????????《MathWorks自动驾驶解决方案》
????????版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!
????????文中部分图片来源自网络,若有侵权,联系立删。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Node.JS 中 Buffer 和 Stream 的区别
- 【项目管理】CMMI-原因分析与解决过程(CAR)
- 【开源】基于Vue+SpringBoot的就医保险管理系统
- uniapp获取app版本号、h5版本号、微信小程序版本号的方法
- 如何在CentOS安装SQL Server数据库并通过内网穿透工具实现公网访问
- Kong关键概念 - 路由(Routes)
- 某领先的集成电路研发中心:建立跨网交换平台 杜绝数据泄露风险
- 从性价比到功能体验,Ruff智能数采网关更适用于工业和市政领域
- Git教程学习:03 记录每次更新到仓库
- 【华为数据之道学习笔记】6-6从“保姆”模式到“服务+自助”模式