Linux内核--进程管理(十三)O(1)调度算法
目录
一、引言
二、O(1)调度算法原理
------>2.1、prio_array 结构
------>2.2、runqueue 结构
三、实时进程调度
四、普通进程调度
------>4.1、运行时间片计算
五、O(1)调度算法实现
------>5.1、时钟中断任务调度
------>5.2、任务调度
一、引言
Linux是一个支持多任务的操作系统,而多个任务之间的切换是通过 调度器 来完成,调度器 使用不同的调度算法会有不同的效果。Linux2.4版本使用的调度算法的时间复杂度为O(n),其主要原理是通过轮询所有可运行任务列表,然后挑选一个最合适的任务运行,所以其时间复杂度与可运行任务队列的长度成正比。而Linux2.6开始替换成名为 O(1)调度算法,顾名思义,其时间复杂度为O(1)。虽然在后面的版本开始使用 CFS调度算法(完全公平调度算法),但了解 O(1)调度算法 对学习Linux调度器还是有很大帮助的,所以本文主要介绍 O(1)调度算法 的原理与实现。
二、O(1)调度算法原理
2.1、prio_array 结构
O(1)调度算法 通过优先级来对任务进行分组,可分为140个优先级(0 ~ 139,数值越小优先级越高),每个优先级的任务由一个队列来维护。
prio_array 结构就是用来维护这些任务队列,如下代码:
#define MAX_USER_RT_PRIO 100
#define MAX_RT_PRIO MAX_USER_RT_PRIO
#define MAX_PRIO (MAX_RT_PRIO + 40)
#define BITMAP_SIZE ((((MAX_PRIO+1+7)/8)+sizeof(long)-1)/sizeof(long))
struct prio_array {
int nr_active;
unsigned long bitmap[BITMAP_SIZE];
struct list_head queue[MAX_PRIO];
};
下面介绍 prio_array 结构各个字段的作用:
- nr_active: 所有优先级队列中的总任务数。
- bitmap: 位图,每个位对应一个优先级的任务队列,用于记录哪个任务队列不为空,能通过 bitmap 够快速找到不为空的任务队列。
- queue: 优先级队列数组,每个元素维护一个优先级队列,比如索引为0的元素维护着优先级为0的任务队列。
下图更直观地展示了 prio_array 结构各个字段的关系:

如上图所述,bitmap 的第2位和第6位为1(红色代表为1,白色代表为0),表示优先级为2和6的任务队列不为空,也就是说 queue 数组的第2个元素和第6个元素的队列不为空。
2.2、runqueue 结构
另外,为了减少多核CPU之间的竞争,所以每个CPU都需要维护一份本地的优先队列。因为如果使用全局的优先队列,那么多核CPU就需要对全局优先队列进行上锁,从而导致性能下降。
每个CPU都需要维护一个 runqueue 结构,runqueue 结构主要维护任务调度相关的信息,比如优先队列、调度次数、CPU负载信息等。其定义如下:
struct runqueue {
spinlock_t lock;
unsigned long nr_running,
nr_switches,
expired_timestamp,
nr_uninterruptible;
task_t *curr, *idle;
struct mm_struct *prev_mm;
prio_array_t *active, *expired, arrays[2];
int prev_cpu_load[NR_CPUS];
task_t *migration_thread;
struct list_head migration_queue;
atomic_t nr_iowait;
};
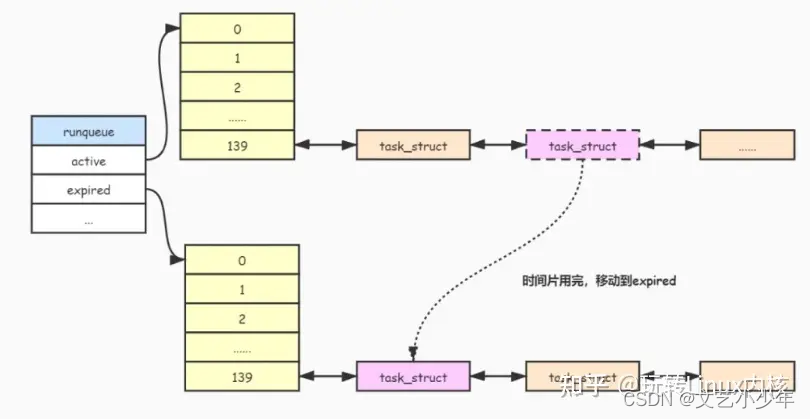
runqueue 结构有两个重要的字段:active 和 expired,这两个字段在 O(1)调度算法 中起着至关重要的作用。我们先来了解一下 O(1)调度算法 的大概原理。
我们注意到 active 和 expired 字段的类型为 prio_array,指向任务优先队列。active 代表可以调度的任务队列,而 expired 字段代表时间片已经用完的任务队列。active 和 expired 会进行以下两个过程:
- 当 active 中的任务时间片用完,那么就会被移动到 expired 中。
- 当 active 中已经没有任务可以运行,就把 expired 与 active 交换,从而 expired 中的任务可以重新被调度。
如下图所示:

二、实时进程调度
实时进程分为 FIFO(先进先出) 和 RR(时间轮询) 两种,其调度算法比较简单,如下:
- 先进先出的实时进程调度:如果调度器在执行某个先进先出的实时进程,那么调度器会一直运行这个进程,直至其主动放弃运行权(退出进程或者sleep等)。
- 时间轮询的实时进程调度:如果调度器在执行某个时间轮询的实时进程,那么调度器会判断当前进程的时间片是否用完,如果用完的话,那么重新分配时间片给它,并且重新放置回 active 队列中,然后调度到其他同优先级或者优先级更高的实时进程进行运行。
三、普通进程调度
每个进程都要一个动态优先级和静态优先级,静态优先级不会变化(进程创建时被设置),而动态优先级会随着进程的睡眠时间而发生变化。动态优先级可以通过以下公式进行计算:
动态优先级 = max(100, min(静态优先级 – bonus + 5), 139))
上面公式的 bonus(奖励或惩罚) 是通过进程的睡眠时间计算出来,进程的睡眠时间越大,bonus 的值就越大,那么动态优先级就越高(前面说过优先级的值越小,优先级越高)。
另外要说明一下,实时进程的动态优先级与静态优先级相同。
当一个普通进程被添加到运行队列时,会先计算其动态优先级,然后按照动态优先级的值来添加到对应优先级的队列中。而调度器调度进程时,会先选择优先级最高的任务队列中的进程进行调度运行。
3.1、运行时间片计算
当进程的时间用完后,就需要重新进行计算。进程的运行时间片与静态优先级有关,可以通过以下公式进行计算:
静态优先级 < 120,运行时间片 = max((140-静态优先级)*20, MIN_TIMESLICE)
静态优先级 >= 120,运行时间片 = max((140-静态优先级)*5, MIN_TIMESLICE)
四、O(1)调度算法实现
接下来我们分析一下 O(1)调度算法 在内核中的实现。
4.1、时钟中断
时钟中断是由硬件触发的,可以通过编程来设置其频率,Linux内核一般设置为每秒产生100 ~ 1000次。时钟中断会触发调用 scheduler_tick() 内核函数,其主要工作是:减少进程的可运行时间片,如果时间片用完,那么把进程从 active 队列移动到 expired 队列中。代码如下:
void scheduler_tick(int user_ticks, int sys_ticks)
{
runqueue_t *rq = this_rq();
task_t *p = current;
...
// 处理普通进程
if (!--p->time_slice) { // 减少时间片, 如果时间片用完
dequeue_task(p, rq->active); // 把进程从运行队列中删除
set_tsk_need_resched(p); // 设置要重新调度标志
p->prio = effective_prio(p); // 重新计算动态优先级
p->time_slice = task_timeslice(p); // 重新计算时间片
p->first_time_slice = 0;
if (!rq->expired_timestamp)
rq->expired_timestamp = jiffies;
// 如果不是交互进程或者没有出来饥饿状态
if (!TASK_INTERACTIVE(p) || EXPIRED_STARVING(rq)) {
enqueue_task(p, rq->expired); // 移动到expired队列
} else
enqueue_task(p, rq->active); // 重新放置到active队列
}
...
}
上面代码主要完成以下几个工作:
- 减少进程的时间片,并且判断时间片是否已经使用完。
- 如果时间片使用完,那么把进程从 active 队列中删除。
- 调用 set_tsk_need_resched() 函数设 TIF_NEED_RESCHED 标志,表示当前进程需要重新调度。
- 调用 effective_prio() 函数重新计算进程的动态优先级。
- 调用 task_timeslice() 函数重新计算进程的可运行时间片。
- 如果当前进程是交互进程或者出来饥饿状态,那么重新加入到 active 队列。
- 否则把今天移动到 expired 队列。
4.2、任务调度
如果进程设置了 TIF_NEED_RESCHED 标志,那么当从时钟中断返回到用户空间时,会调用 schedule() 函数进行任务调度。
schedule() 函数代码如下:
void schedule(void)
{
...
prev = current; // 当前需要被调度的进程
rq = this_rq(); // 获取当前CPU的runqueue
array = rq->active; // active队列
// 如果active队列中没有进程, 那么替换成expired队列
if (unlikely(!array->nr_active)) {
rq->active = rq->expired;
rq->expired = array;
array = rq->active;
rq->expired_timestamp = 0;
}
idx = sched_find_first_bit(array->bitmap); // 找到最高优先级的任务队列
queue = array->queue + idx;
next = list_entry(queue->next, task_t, run_list); // 获取到下一个将要运行的进程
...
prev->sleep_avg -= run_time; // 减少当前进程的睡眠时间
...
if (likely(prev != next)) {
...
prev = context_switch(rq, prev, next); // 切换到next进程进行运行
...
}
...
}
上面代码主要完成以下几个步骤:
- 如果当前 runqueue 的 active 队列为空,那么把 active 队列与 expired 队列进行交换。
- 调用 sched_find_first_bit() 函数在 bitmap 中找到优先级最高并且不为空的任务队列索引。
- 减少当前进程的睡眠时间。
- 调用 context_switch() 函数切换到next进程进行运行。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Go json 能否解码到一个 interface 类型的值
- Python 算法交易实验67 第一次迭代总结
- 带你手把手解读frejail沙盒源码(0.9.72版本) (六)fldd
- 一篇文章学会如何在 NestJS 中使用 Redis 并基于 Redis 实现接口访问限频率
- js删除cookie
- docker容器部署.NETCore 项目前后分离整过程
- ES6 面试题 | 02.精选 ES6 面试题
- 宝宝智慧的营养之源:新生儿核苷酸的呵护指南
- Embedded-Project项目介绍
- how2heap-2.23-08-large_bin_attack