AT32 F435简介4/N ChibiOS porting plan
AT32 F435简介4/N ChibiOS porting plan
1. 源由
- 对比STM32 F405进行AT32 F435 MCU的资料研读,期望获取更多差异化信息;
- 配合ChibiOS的porting工作,有理有据;
- 寻找AT32 F435的一些亮点功能和特性;
2. 框图
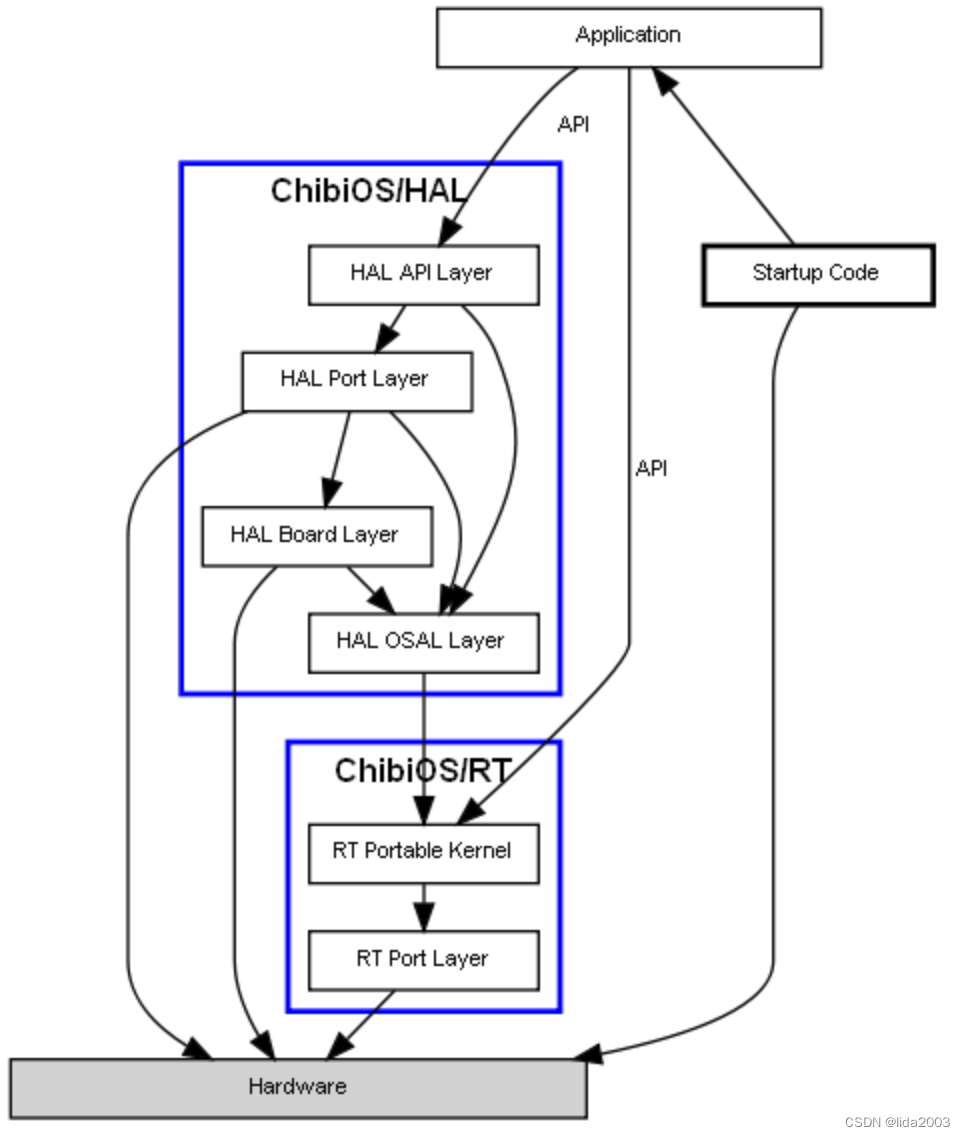
根据ChibiOS总体框图,整个ChibiOS移植涉及以下几个部分:
- Startup Code:
./os/common/startup - RT Port Layer:
./os/common/ports - HAL Board Layer:
./os/hal/boards - HAL Port Layer:
./os/hal/ports
3. Makefile
以STM32H743为例,分析如下:
Makefile
├──> [Licensing files]
│ └──> $(CHIBIOS)/os/license/license.mk
├──> [Startup files]
│ └──> $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/mk/startup_stm32h7xx.mk
├──> [HAL-OSAL files]
│ ├──> $(CHIBIOS)/os/hal/hal.mk
│ ├──> $(CHIBIOS)/os/hal/ports/STM32/STM32H7xx/platform.mk
│ ├──> $(CHIBIOS)/os/hal/boards/ST_NUCLEO144_H743ZI/board.mk
│ └──> $(CHIBIOS)/os/hal/osal/rt-nil/osal.mk
├──> [RTOS files]
│ ├──> $(CHIBIOS)/os/rt/rt.mk
│ └──> $(CHIBIOS)/os/common/ports/ARMv7-M/compilers/GCC/mk/port.mk
├──> [Auto-build files in ./source recursively.]
│ └──> $(CHIBIOS)/tools/mk/autobuild.mk
├──> [Other files]
│ ├──> $(CHIBIOS)/os/test/test.mk
│ ├──> $(CHIBIOS)/test/rt/rt_test.mk
│ └──> $(CHIBIOS)/test/oslib/oslib_test.mk
├──> $(STARTUPLD)/STM32H743xI.ld
├──> $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/mk/rules.mk
└──> $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/mk/arm-none-eabi.mk
4. 分析
接下来结合2/3章节,分析移植ChibiOS涉及的内容:
4.1 Startup Code
$(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/mk/startup_stm32h7xx.mk内容包含:
# List of the ChibiOS generic STM32H7xx startup and CMSIS files.
STARTUPSRC = $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/crt1.c
STARTUPASM = $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/crt0_v7m.S \
$(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/vectors.S
STARTUPINC = $(CHIBIOS)/os/common/portability/GCC \
$(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC \
$(CHIBIOS)/os/common/startup/ARMCMx/devices/STM32H7xx \
$(CHIBIOS)/os/common/ext/ARM/CMSIS/Core/Include \
$(CHIBIOS)/os/common/ext/ST/STM32H7xx
STARTUPLD = $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/ld
# Shared variables
ALLXASMSRC += $(STARTUPASM)
ALLCSRC += $(STARTUPSRC)
ALLINC += $(STARTUPINC)
- 启动代码定义,详见:
$(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/mk/startup_stm32h7xx.mk
├──> [ARMCMx_GCC_STARTUP]
│ └──> $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/crt1.c
├──> [ARMCMx_GCC_STARTUP_V7M]
│ └──> $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/crt0_v7m.S
└──> [ARMCMx_GCC_VECTORS Cortex-Mx Interrupt Vectors]
└──> $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/vectors.S
- 地址符号定义,详见:
$(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/mk/startup_stm32h7xx.mk
├──> $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/ld/rules_stacks.ld
├──> $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/ld/rules_code.ld
├──> $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/ld/rules_data.ld
└──> $(CHIBIOS)/os/common/startup/ARMCMx/compilers/GCC/ld/rules_memory.ld
4.2 RT Port Layer
$(CHIBIOS)/os/common/ports/ARMv7-M/compilers/GCC/mk/port.mk内容包含:
# List of the ChibiOS/RT ARMv7M generic port files.
PORTSRC = $(CHIBIOS)/os/common/ports/ARMv7-M/chcore.c
PORTASM = $(CHIBIOS)/os/common/ports/ARMv7-M/compilers/GCC/chcoreasm.S
PORTINC = $(CHIBIOS)/os/common/portability/GCC \
$(CHIBIOS)/os/common/ports/ARM-common \
$(CHIBIOS)/os/common/ports/ARMv7-M
# Shared variables
ALLXASMSRC += $(PORTASM)
ALLCSRC += $(PORTSRC)
ALLINC += $(PORTINC)
$(CHIBIOS)/os/common/ports/ARMv7-M/compilers/GCC/chcoreasm.S代码定义:
a) __port_switch
b) __port_thread_start
c) __port_switch_from_isr
$(CHIBIOS)/os/common/ports/ARMv7-M/chcore.c代码定义:
a) SVC_Handler
b) PendSV_Handler
c) port_init
d) __port_set_region
e) __port_irq_epilogue
4.3 HAL Board Layer
$(CHIBIOS)/os/hal/boards/ST_NUCLEO144_H743ZI/board.mk内容包含:
# List of all the board related files.
BOARDSRC = $(CHIBIOS)/os/hal/boards/ST_NUCLEO144_H743ZI/board.c
# Required include directories
BOARDINC = $(CHIBIOS)/os/hal/boards/ST_NUCLEO144_H743ZI
# Shared variables
ALLCSRC += $(BOARDSRC)
ALLINC += $(BOARDINC)
$(CHIBIOS)/os/hal/boards/ST_NUCLEO144_H743ZI/board.c代码定义:
a) gpio_init
b) stm32_gpio_init
c) __early_init
d) sdc_lld_is_card_inserted
e) sdc_lld_is_write_protected
f) mmc_lld_is_card_inserted
g) mmc_lld_is_write_protected
h) boardInit
4.4 HAL Port Layer
$(CHIBIOS)/os/hal/ports/STM32/STM32H7xx/platform.mk内容包含:
# Required platform files.
PLATFORMSRC := $(CHIBIOS)/os/hal/ports/common/ARMCMx/nvic.c \
$(CHIBIOS)/os/hal/ports/STM32/STM32H7xx/stm32_isr.c \
$(CHIBIOS)/os/hal/ports/STM32/STM32H7xx/hal_lld.c
# Required include directories.
PLATFORMINC := $(CHIBIOS)/os/hal/ports/common/ARMCMx \
$(CHIBIOS)/os/hal/ports/STM32/STM32H7xx
# Optional platform files.
ifeq ($(USE_SMART_BUILD),yes)
# Configuration files directory
ifeq ($(HALCONFDIR),)
ifeq ($(CONFDIR),)
HALCONFDIR = .
else
HALCONFDIR := $(CONFDIR)
endif
endif
HALCONF := $(strip $(shell cat $(HALCONFDIR)/halconf.h | egrep -e "\#define"))
else
endif
# Drivers compatible with the platform.
include $(CHIBIOS)/os/hal/ports/STM32/LLD/ADCv4/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/BDMAv1/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/CRYPv1/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/DACv1/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/DMAv2/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/EXTIv1/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/FDCANv1/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/GPIOv2/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/I2Cv3/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/MACv2/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/MDMAv1/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/OTGv1/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/QUADSPIv2/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/SDMMCv2/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/SPIv3/driver_v2.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/RNGv1/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/RTCv2/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/SYSTICKv1/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/TIMv1/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/USARTv3/driver.mk
include $(CHIBIOS)/os/hal/ports/STM32/LLD/xWDGv1/driver.mk
# Shared variables
ALLCSRC += $(PLATFORMSRC)
ALLINC += $(PLATFORMINC)
- 平台移植部分:
a) $(CHIBIOS)/os/hal/ports/common/ARMCMx/nvic.c
b) $(CHIBIOS)/os/hal/ports/STM32/STM32H7xx/stm32_isr.c
c) $(CHIBIOS)/os/hal/ports/STM32/STM32H7xx/hal_lld.c
- 接口移植部分:
a) $(CHIBIOS)/os/hal/ports/STM32/LLD/ADCv4/driver.mk
b) $(CHIBIOS)/os/hal/ports/STM32/LLD/BDMAv1/driver.mk
c) $(CHIBIOS)/os/hal/ports/STM32/LLD/CRYPv1/driver.mk
d) $(CHIBIOS)/os/hal/ports/STM32/LLD/DACv1/driver.mk
e) $(CHIBIOS)/os/hal/ports/STM32/LLD/DMAv2/driver.mk
f) $(CHIBIOS)/os/hal/ports/STM32/LLD/EXTIv1/driver.mk
g) $(CHIBIOS)/os/hal/ports/STM32/LLD/FDCANv1/driver.mk
h) $(CHIBIOS)/os/hal/ports/STM32/LLD/GPIOv2/driver.mk
i) $(CHIBIOS)/os/hal/ports/STM32/LLD/I2Cv3/driver.mk
j) $(CHIBIOS)/os/hal/ports/STM32/LLD/MACv2/driver.mk
k) $(CHIBIOS)/os/hal/ports/STM32/LLD/MDMAv1/driver.mk
l) $(CHIBIOS)/os/hal/ports/STM32/LLD/OTGv1/driver.mk
m) $(CHIBIOS)/os/hal/ports/STM32/LLD/QUADSPIv2/driver.mk
n) $(CHIBIOS)/os/hal/ports/STM32/LLD/SDMMCv2/driver.mk
o) $(CHIBIOS)/os/hal/ports/STM32/LLD/SPIv3/driver_v2.mk
p) $(CHIBIOS)/os/hal/ports/STM32/LLD/RNGv1/driver.mk
q) $(CHIBIOS)/os/hal/ports/STM32/LLD/RTCv2/driver.mk
r) $(CHIBIOS)/os/hal/ports/STM32/LLD/SYSTICKv1/driver.mk
s) $(CHIBIOS)/os/hal/ports/STM32/LLD/TIMv1/driver.mk
t) $(CHIBIOS)/os/hal/ports/STM32/LLD/USARTv3/driver.mk
u) $(CHIBIOS)/os/hal/ports/STM32/LLD/xWDGv1/driver.mk
5. 总结
通过分析ChibiOS总体框图和Makefile,初步分析移植ChibiOS到特定的MCU上,需要完成的工作量。
通过科学合理安排:a) 任务优先级;b) 移植工作切片/分割;可逐步推进、完成相应移植工作。
6. 参考资料
【1】Ardupilot开源飞控之ChibiOS简介
【2】ARTERY AT32F435
【3】ST STM32F405/415
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!