ConcurrentHashMap源码解析
发布时间:2024年01月14日
并发集合
声明一下:文章来自于马士兵教育-郑金维老师!
源码解析讲的非常清楚,推荐观看!
ConcurrentHashMap
一、存储结构
ConcurrentHashMap是线程安全的HashMap
ConcurrentHashMap在JDK1.8中是以CAS+synchronized实现的线程安全
CAS:在没有hash冲突时(Node要放在数组上时)
synchronized:在出现hash冲突时(Node存放的位置已经有数据了)
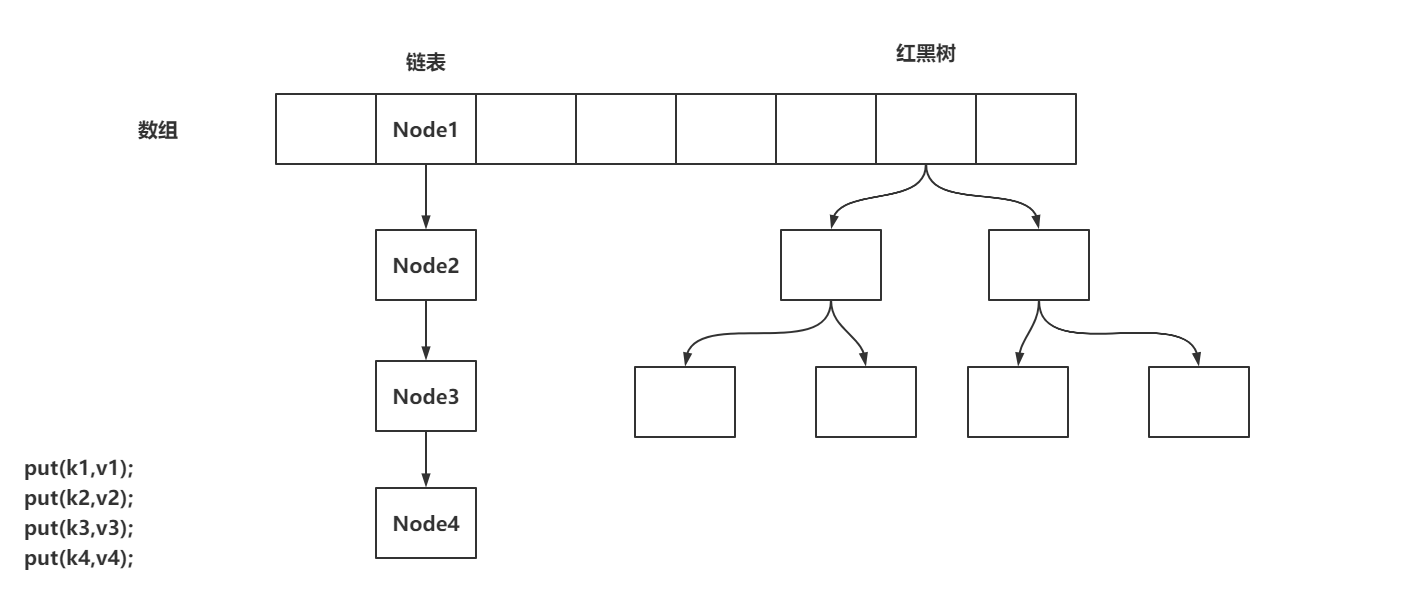
存储的结构:数组+链表+红黑树
二、存储操作
2.1 put方法
public V put(K key, V value) {
// 在调用put方法时,会调用putVal,第三个参数默认传递为false
// 在调用putIfAbsent时,会调用putVal方法,第三个参数传递的为true
// 如果传递为false,代表key一致时,直接覆盖数据
// 如果传递为true,代表key一致时,什么都不做,key不存在,正常添加(Redis,setnx)
return putVal(key, value, false);
}
2.2 putVal方法-散列算法
final V putVal(K key, V value, boolean onlyIfAbsent) {
// ConcurrentHashMap不允许key或者value出现为null的值,跟HashMap的区别
if (key == null || value == null) throw new NullPointerException();
// 根据key的hashCode计算出一个hash值,后期得出当前key-value要存储在哪个数组索引位置
int hash = spread(key.hashCode());
// 一个标识,在后面有用!
int binCount = 0;
// 省略大量的代码……
}
// 计算当前Node的hash值的方法
static final int spread(int h) {
// 将key的hashCode值的高低16位进行^运算,最终又与HASH_BITS进行了&运算
// 将高位的hash也参与到计算索引位置的运算当中
// 为什么HashMap、ConcurrentHashMap,都要求数组长度为2^n
// HASH_BITS让hash值的最高位符号位肯定为0,代表当前hash值默认情况下一定是正数,因为hash值为负数时,有特殊的含义
// static final int MOVED = -1; // 代表当前hash位置的数据正在扩容!
// static final int TREEBIN = -2; // 代表当前hash位置下挂载的是一个红黑树
// static final int RESERVED = -3; // 预留当前索引位置……
return (h ^ (h >>> 16)) & HASH_BITS;
// 计算数组放到哪个索引位置的方法 (f = tabAt(tab, i = (n - 1) & hash)
// n:是数组的长度
}
00001101 00001101 00101111 10001111 - h = key.hashCode
运算方式
00000000 00000000 00000000 00001111 - 15 (n - 1)
&
(
(
00001101 00001101 00101111 10001111 - h
^
00000000 00000000 00001101 00001101 - h >>> 16
)
&
01111111 11111111 11111111 11111111 - HASH_BITS
)
2.3 putVal方法-添加数据到数组&初始化数组
final V putVal(K key, V value, boolean onlyIfAbsent) {
// 省略部分代码…………
// 将Map的数组赋值给tab,死循环
for (Node<K,V>[] tab = table;;) {
// 声明了一堆变量~~
// n:数组长度
// i:当前Node需要存放的索引位置
// f: 当前数组i索引位置的Node对象
// fn:当前数组i索引位置上数据的hash值
Node<K,V> f; int n, i, fh;
// 判断当前数组是否还没有初始化
if (tab == null || (n = tab.length) == 0)
// 将数组进行初始化。
tab = initTable();
// 基于 (n - 1) & hash 计算出当前Node需要存放在哪个索引位置
// 基于tabAt获取到i位置的数据
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {
// 现在数组的i位置上没有数据,基于CAS的方式将数据存在i位置上
if (casTabAt(tab, i, null,new Node<K,V>(hash, key, value, null)))
// 如果成功,执行break跳出循环,插入数据成功
break;
}
// 判断当前位置数据是否正在扩容……
else if ((fh = f.hash) == MOVED)
// 让当前插入数据的线程协助扩容
tab = helpTransfer(tab, f);
// 省略部分代码…………
}
// 省略部分代码…………
}
sizeCtl:是数组在初始化和扩容操作时的一个控制变量
-1:代表当前数组正在初始化
小于-1:低16位代表当前数组正在扩容的线程个数(如果1个线程扩容,值为-2,如果2个线程扩容,值为-3)
0:代表数据还没初始化
大于0:代表当前数组的扩容阈值,或者是当前数组的初始化大小
// 初始化数组方法
private final Node<K,V>[] initTable() {
// 声明标识
Node<K,V>[] tab; int sc;
// 再次判断数组没有初始化,并且完成tab的赋值
while ((tab = table) == null || tab.length == 0) {
// 将sizeCtl赋值给sc变量,并判断是否小于0
if ((sc = sizeCtl) < 0)
Thread.yield();
// 可以尝试初始化数组,线程会以CAS的方式,将sizeCtl修改为-1,代表当前线程可以初始化数组
else if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {
// 尝试初始化!
try {
// 再次判断当前数组是否已经初始化完毕。
if ((tab = table) == null || tab.length == 0) {
// 开始初始化,
// 如果sizeCtl > 0,就初始化sizeCtl长度的数组
// 如果sizeCtl == 0,就初始化默认的长度
int n = (sc > 0) ? sc : DEFAULT_CAPACITY;
// 初始化数组!
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n];
// 将初始化的数组nt,赋值给tab和table
table = tab = nt;
// sc赋值为了数组长度 - 数组长度 右移 2位 16 - 4 = 12
// 将sc赋值为下次扩容的阈值
sc = n - (n >>> 2);
}
} finally {
// 将赋值好的sc,设置给sizeCtl
sizeCtl = sc;
}
break;
}
}
return tab;
}
2.4 putVal方法-添加数据到链表
final V putVal(K key, V value, boolean onlyIfAbsent) {
// 省略部分代码…………
int binCount = 0;
for (Node<K,V>[] tab = table;;) {
Node<K,V> f; int n, i, fh;
// n:数组长度
// i:当前Node需要存放的索引位置
// f: 当前数组i索引位置的Node对象
// fn:当前数组i索引位置上数据的hash值
// 省略部分代码…………
else {
// 声明变量为oldVal
V oldVal = null;
// 基于当前索引位置的Node,作为锁对象……
synchronized (f) {
// 判断当前位置的数据还是之前的f么……(避免并发操作的安全问题)
if (tabAt(tab, i) == f) {
// 再次判断hash值是否大于0(不是树)
if (fh >= 0) {
// binCount设置为1(在链表情况下,记录链表长度的一个标识)
binCount = 1;
// 死循环,每循环一次,对binCount
for (Node<K,V> e = f;; ++binCount) {
// 声明标识ek
K ek;
// 当前i索引位置的数据,是否和当前put的key的hash值一致
if (e.hash == hash &&
// 如果当前i索引位置数据的key和put的key == 返回为true
// 或者equals相等
((ek = e.key) == key || (ek != null && key.equals(ek)))) {
// key一致,可能需要覆盖数据!
// 当前i索引位置数据的value复制给oldVal
oldVal = e.val;
// 如果传入的是false,代表key一致,覆盖value
// 如果传入的是true,代表key一致,什么都不做!
if (!onlyIfAbsent)
// 覆盖value
e.val = value;
break;
}
// 拿到当前指定的Node对象
Node<K,V> pred = e;
// 将e指向下一个Node对象,如果next指向的是一个null,可以挂在当前Node下面
if ((e = e.next) == null) {
// 将hash,key,value封装为Node对象,挂在pred的next上
pred.next = new Node<K,V>(hash, key,
value, null);
break;
}
}
}
// 省略部分代码…………
}
}
// binCount长度不为0
if (binCount != 0) {
// binCount是否大于8(链表长度是否 >= 8)
if (binCount >= TREEIFY_THRESHOLD)
// 尝试转为红黑树或者扩容
// 基于treeifyBin方法和上面的if判断,可以得知链表想要转为红黑树,必须保证数组长度大于等于64,并且链表长度大于等于8
// 如果数组长度没有达到64的话,会首先将数组扩容
treeifyBin(tab, i);
// 如果出现了数据覆盖的情况,
if (oldVal != null)
// 返回之前的值
return oldVal;
break;
}
}
}
// 省略部分代码…………
}
// 为什么链表长度为8转换为红黑树,不是能其他数值嘛?
// 因为布松分布
The main disadvantage of per-bin locks is that other update
* operations on other nodes in a bin list protected by the same
* lock can stall, for example when user equals() or mapping
* functions take a long time. However, statistically, under
* random hash codes, this is not a common problem. Ideally, the
* frequency of nodes in bins follows a Poisson distribution
* (http://en.wikipedia.org/wiki/Poisson_distribution) with a
* parameter of about 0.5 on average, given the resizing threshold
* of 0.75, although with a large variance because of resizing
* granularity. Ignoring variance, the expected occurrences of
* list size k are (exp(-0.5) * pow(0.5, k) / factorial(k)). The
* first values are:
*
* 0: 0.60653066
* 1: 0.30326533
* 2: 0.07581633
* 3: 0.01263606
* 4: 0.00157952
* 5: 0.00015795
* 6: 0.00001316
* 7: 0.00000094
* 8: 0.00000006
* more: less than 1 in ten million
三、扩容操作
3.1 treeifyBin方法触发扩容
// 在链表长度大于等于8时,尝试将链表转为红黑树
private final void treeifyBin(Node<K,V>[] tab, int index) {
Node<K,V> b; int n, sc;
// 数组不能为空
if (tab != null) {
// 数组的长度n,是否小于64
if ((n = tab.length) < MIN_TREEIFY_CAPACITY)
// 如果数组长度小于64,不能将链表转为红黑树,先尝试扩容操作
tryPresize(n << 1);
// 省略部分代码……
}
}
3.2 tryPreSize方法-针对putAll的初始化操作
// size是将之前的数组长度 左移 1位得到的结果
private final void tryPresize(int size) {
// 如果扩容的长度达到了最大值,就使用最大值
// 否则需要保证数组的长度为2的n次幂
// 这块的操作,是为了初始化操作准备的,因为调用putAll方法时,也会触发tryPresize方法
// 如果刚刚new的ConcurrentHashMap直接调用了putAll方法的话,会通过tryPresize方法进行初始化
int c = (size >= (MAXIMUM_CAPACITY >>> 1)) ? MAXIMUM_CAPACITY :
tableSizeFor(size + (size >>> 1) + 1);
// 这些代码和initTable一模一样
// 声明sc
int sc;
// 将sizeCtl的值赋值给sc,并判断是否大于0,这里代表没有初始化操作,也没有扩容操作
while ((sc = sizeCtl) >= 0) {
// 将ConcurrentHashMap的table赋值给tab,并声明数组长度n
Node<K,V>[] tab = table; int n;
// 数组是否需要初始化
if (tab == null || (n = tab.length) == 0) {
// 进来执行初始化
// sc是初始化长度,初始化长度如果比计算出来的c要大的话,直接使用sc,如果没有sc大,
// 说明sc无法容纳下putAll中传入的map,使用更大的数组长度
n = (sc > c) ? sc : c;
// 设置sizeCtl为-1,代表初始化操作
if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {
try {
// 再次判断数组的引用有没有变化
if (table == tab) {
// 初始化数组
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n];
// 数组赋值
table = nt;
// 计算扩容阈值
sc = n - (n >>> 2);
}
} finally {
// 最终赋值给sizeCtl
sizeCtl = sc;
}
}
}
// 如果计算出来的长度c如果小于等于sc,直接退出循环结束方法
// 数组长度大于等于最大长度了,直接退出循环结束方法
else if (c <= sc || n >= MAXIMUM_CAPACITY)
break;
// 省略部分代码
}
}
// 将c这个长度设置到最近的2的n次幂的值, 15 - 16 17 - 32
// c == size + (size >>> 1) + 1
// size = 17
00000000 00000000 00000000 00010001
+
00000000 00000000 00000000 00001000
+
00000000 00000000 00000000 00000001
// c = 26
00000000 00000000 00000000 00011010
private static final int tableSizeFor(int c) {
// 00000000 00000000 00000000 00011001
int n = c - 1;
// 00000000 00000000 00000000 00011001
// 00000000 00000000 00000000 00001100
// 00000000 00000000 00000000 00011101
n |= n >>> 1;
// 00000000 00000000 00000000 00011101
// 00000000 00000000 00000000 00000111
// 00000000 00000000 00000000 00011111
n |= n >>> 2;
// 00000000 00000000 00000000 00011111
// 00000000 00000000 00000000 00000001
// 00000000 00000000 00000000 00011111
n |= n >>> 4;
// 00000000 00000000 00000000 00011111
// 00000000 00000000 00000000 00000000
// 00000000 00000000 00000000 00011111
n |= n >>> 8;
// 00000000 00000000 00000000 00011111
n |= n >>> 16;
// 00000000 00000000 00000000 00100000
return (n < 0) ? 1 : (n >= MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : n + 1;
}
3.3 tryPreSize方法-计算扩容戳并且查看BUG
private final void tryPresize(int size) {
// n:数组长度
while ((sc = sizeCtl) >= 0) {
// 判断当前的tab是否和table一致,
else if (tab == table) {
// 计算扩容表示戳,根据当前数组的长度计算一个16位的扩容戳
// 第一个作用是为了保证后面的sizeCtl赋值时,保证sizeCtl为小于-1的负数
// 第二个作用用来记录当前是从什么长度开始扩容的
int rs = resizeStamp(n);
// BUG --- sc < 0,永远进不去~
// 如果sc小于0,代表有线程正在扩容。
if (sc < 0) {
// 省略部分代码……协助扩容的代码(进不来~~~~)
}
// 代表没有线程正在扩容,我是第一个扩容的。
else if (U.compareAndSwapInt(this, SIZECTL, sc,
(rs << RESIZE_STAMP_SHIFT) + 2))
// 省略部分代码……第一个扩容的线程……
}
}
}
// 计算扩容表示戳
// 32 = 00000000 00000000 00000000 00100000
// Integer.numberOfLeadingZeros(32) = 26
// 1 << (RESIZE_STAMP_BITS - 1)
// 00000000 00000000 10000000 00000000
// 00000000 00000000 00000000 00011010
// 00000000 00000000 10000000 00011010
static final int resizeStamp(int n) {
return Integer.numberOfLeadingZeros(n) | (1 << (RESIZE_STAMP_BITS - 1));
}
3.4 tryPreSize方法-对sizeCtl的修改以及条件判断的BUG
private final void tryPresize(int size) {
// sc默认为sizeCtl
while ((sc = sizeCtl) >= 0) {
else if (tab == table) {
// rs:扩容戳 00000000 00000000 10000000 00011010
int rs = resizeStamp(n);
if (sc < 0) {
// 说明有线程正在扩容,过来帮助扩容
Node<K,V>[] nt;
// 依然有BUG
// 当前线程扩容时,老数组长度是否和我当前线程扩容时的老数组长度一致
// 00000000 00000000 10000000 00011010
if ((sc >>> RESIZE_STAMP_SHIFT) != rs
// 10000000 00011010 00000000 00000010
// 00000000 00000000 10000000 00011010
// 这两个判断都是有问题的,核心问题就应该先将rs左移16位,再追加当前值。
// 这两个判断是BUG
// 判断当前扩容是否已经即将结束
|| sc == rs + 1 // sc == rs << 16 + 1 BUG
// 判断当前扩容的线程是否达到了最大限度
|| sc == rs + MAX_RESIZERS // sc == rs << 16 + MAX_RESIZERS BUG
// 扩容已经结束了。
|| (nt = nextTable) == null
// 记录迁移的索引位置,从高位往低位迁移,也代表扩容即将结束。
|| transferIndex <= 0)
break;
// 如果线程需要协助扩容,首先就是对sizeCtl进行+1操作,代表当前要进来一个线程协助扩容
if (U.compareAndSwapInt(this, SIZECTL, sc, sc + 1))
// 上面的判断没进去的话,nt就代表新数组
transfer(tab, nt);
}
// 是第一个来扩容的线程
// 基于CAS将sizeCtl修改为 10000000 00011010 00000000 00000010
// 将扩容戳左移16位之后,符号位是1,就代码这个值为负数
// 低16位在表示当前正在扩容的线程有多少个,
// 为什么低位值为2时,代表有一个线程正在扩容
// 每一个线程扩容完毕后,会对低16位进行-1操作,当最后一个线程扩容完毕后,减1的结果还是-1,
// 当值为-1时,要对老数组进行一波扫描,查看是否有遗漏的数据没有迁移到新数组
else if (U.compareAndSwapInt(this, SIZECTL, sc,(rs << RESIZE_STAMP_SHIFT) + 2))
// 调用transfer方法,并且将第二个参数设置为null,就代表是第一次来扩容!
transfer(tab, null);
}
}
}
3.5 transfer方法-计算每个线程迁移的长度
// 开始扩容 tab=oldTable
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
// n = 数组长度
// stride = 每个线程一次性迁移多少数据到新数组
int n = tab.length, stride;
// 基于CPU的内核数量来计算,每个线程一次性迁移多少长度的数据最合理
// NCPU = 4
// 举个栗子:数组长度为1024 - 512 - 256 - 128 / 4 = 32
// MIN_TRANSFER_STRIDE = 16,为每个线程迁移数据的最小长度
if ((stride = (NCPU > 1) ? (n >>> 3) / NCPU : n) < MIN_TRANSFER_STRIDE)
stride = MIN_TRANSFER_STRIDE;
// 根据CPU计算每个线程一次迁移多长的数据到新数组,如果结果大于16,使用计算结果。 如果结果小于16,就使用最小长度16
}
3.6 transfer方法-构建新数组并查看标识属性
// 以32长度数组扩容到64位例子
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
// n = 老数组长度 32
// stride = 步长 16
// 第一个进来扩容的线程需要把新数组构建出来
if (nextTab == null) {
try {
// 将原数组长度左移一位,构建新数组长度
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n << 1];
// 赋值操作
nextTab = nt;
} catch (Throwable ex) {
// 到这说明已经达到数组长度的最大取值范围
sizeCtl = Integer.MAX_VALUE;
// 设置sizeCtl后直接结束
return;
}
// 将成员变量的新数组赋值
nextTable = nextTab;
// 迁移数据时,用到的标识,默认值为老数组长度
transferIndex = n; // 32
}
// 新数组长度
int nextn = nextTab.length; // 64
// 在老数组迁移完数据后,做的标识
ForwardingNode<K,V> fwd = new ForwardingNode<K,V>(nextTab);
// 迁移数据时,需要用到的标识
boolean advance = true;
boolean finishing = false;
// 省略部分代码
}
3.7 transfer方法-线程领取迁移任务
// 以32长度扩容到64位为例子
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
// n:32
// stride:16
int n = tab.length, stride;
if (nextTab == null) {
// 省略部分代码…………
// nextTable:新数组
nextTable = nextTab;
// transferIndex:0
transferIndex = n;
}
// nextn:64
int nextn = nextTab.length;
ForwardingNode<K,V> fwd = new ForwardingNode<K,V>(nextTab);
// advance:true,代表当前线程需要接收任务,然后再执行迁移, 如果为false,代表已经接收完任务
boolean advance = true;
// finishing:false,是否迁移结束!
boolean finishing = false;
// 循环……
// i = 15 代表当前线程迁移数据的索引值!!
// bound = 0
for (int i = 0, bound = 0;;) {
// f = null
// fh = 0
Node<K,V> f; int fh;
// 当前线程要接收任务
while (advance) {
// nextIndex = 16
// nextBound = 16
int nextIndex, nextBound;
// 第一次进来,这两个判断肯定进不去。
// 对i进行--,并且判断当前任务是否处理完毕!
if (--i >= bound || finishing)
advance = false;
// 判断transferIndex是否小于等于0,代表没有任务可领取,结束了。
// 在线程领取任务会,会对transferIndex进行修改,修改为transferIndex - stride
// 在任务都领取完之后,transferIndex肯定是小于等于0的,代表没有迁移数据的任务可以领取
else if ((nextIndex = transferIndex) <= 0) {
i = -1;
advance = false;
}
// 当前线程尝试领取任务
else if (U.compareAndSwapInt
(this, TRANSFERINDEX, nextIndex,
nextBound = (nextIndex > stride ? nextIndex - stride : 0))) {
// 对bound赋值
bound = nextBound;
// 对i赋值
i = nextIndex - 1;
// 设置advance设置为false,代表当前线程领取到任务了。
advance = false;
}
}
// 开始迁移数据,并且在迁移完毕后,会将advance设置为true
}
}
3.8 transfer方法-迁移结束操作
// 以32长度扩容到64位为例子
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
for (int i = 0, bound = 0;;) {
while (advance) {
// 判断扩容是否已经结束!
// i < 0:当前线程没有接收到任务!
// i >= n: 迁移的索引位置,不可能大于数组的长度,不会成立
// i + n >= nextn:因为i最大值就是数组索引的最大值,不会成立
if (i < 0 || i >= n || i + n >= nextn) {
// 如果进来,代表当前线程没有接收到任务
int sc;
// finishing为true,代表扩容结束
if (finishing) {
// 将nextTable新数组设置为null
nextTable = null;
// 将当前数组的引用指向了新数组~
table = nextTab;
// 重新计算扩容阈值 64 - 16 = 48
sizeCtl = (n << 1) - (n >>> 1);
// 结束扩容
return;
}
// 当前线程没有接收到任务,让当前线程结束扩容操作。
// 采用CAS的方式,将sizeCtl - 1,代表当前并发扩容的线程数 - 1
if (U.compareAndSwapInt(this, SIZECTL, sc = sizeCtl, sc - 1)) {
// sizeCtl的高16位是基于数组长度计算的扩容戳,低16位是当前正在扩容的线程个数
if ((sc - 2) != resizeStamp(n) << RESIZE_STAMP_SHIFT)
// 代表当前线程并不是最后一个退出扩容的线程,直接结束当前线程扩容
return;
// 如果是最后一个退出扩容的线程,将finishing和advance设置为true
finishing = advance = true;
// 将i设置为老数组长度,让最后一个线程再从尾到头再次检查一下,是否数据全部迁移完毕。
i = n;
}
}
// 开始迁移数据,并且在迁移完毕后,会将advance设置为true
}
}
3.9 transfer方法-迁移数据(链表)
// 以32长度扩容到64位为例子
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
// 省略部分代码…………
for (int i = 0, bound = 0;;) {
// 省略部分代码…………
if (i < 0 || i >= n || i + n >= nextn) {
// 省略部分代码…………
}
// 开始迁移数据,并且在迁移完毕后,会将advance设置为true
// 获取指定i位置的Node对象,并且判断是否为null
else if ((f = tabAt(tab, i)) == null)
// 当前桶位置没有数据,无需迁移,直接将当前桶位置设置为fwd
advance = casTabAt(tab, i, null, fwd);
// 拿到当前i位置的hash值,如果为MOVED,证明数据已经迁移过了。
else if ((fh = f.hash) == MOVED)
// 一般是给最后扫描时,使用的判断,如果迁移完毕,直接跳过当前位置。
advance = true; // already processed
else {
// 当前桶位置有数据,先锁住当前桶位置。
synchronized (f) {
// 判断之前取出的数据是否为当前的数据。
if (tabAt(tab, i) == f) {
// ln:null - lowNode
// hn:null - highNode
Node<K,V> ln, hn;
// hash大于0,代表当前Node属于正常情况,不是红黑树,使用链表方式迁移数据
if (fh >= 0) {
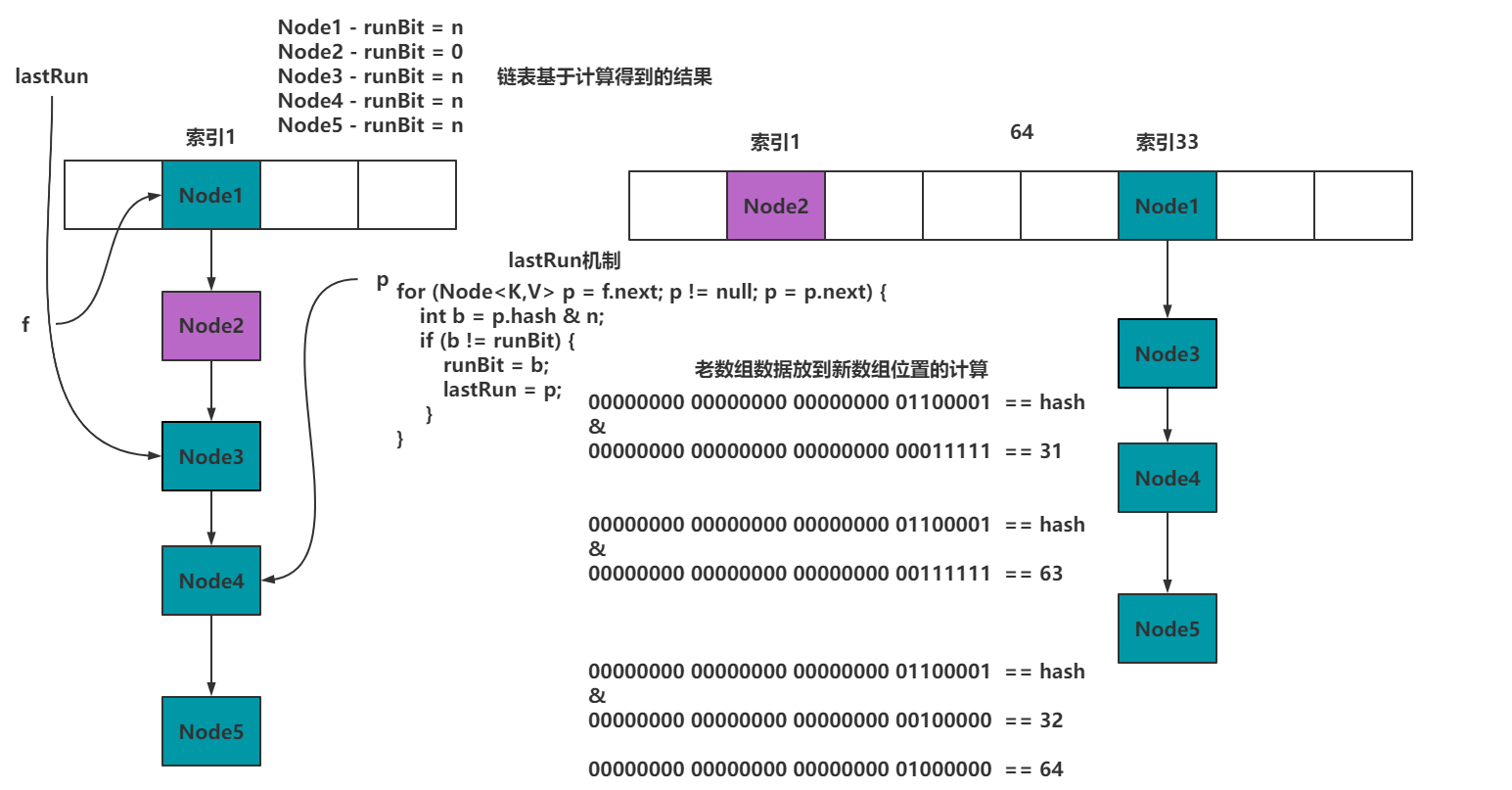
// lastRun机制
// 000000000010000
// 这种运算结果只有两种,要么是0,要么是n
int runBit = fh & n;
// 将f赋值给lastRun
Node<K,V> lastRun = f;
// 循环的目的就是为了得到链表下经过hash & n结算,结果一致的最后一些数据
// 在迁移数据时,值需要迁移到lastRun即可,剩下的指针不需要变换。
for (Node<K,V> p = f.next; p != null; p = p.next) {
int b = p.hash & n;
if (b != runBit) {
runBit = b;
lastRun = p;
}
}
// runBit == 0,赋值给ln
if (runBit == 0) {
ln = lastRun;
hn = null;
}
// rubBit == n,赋值给hn
else {
hn = lastRun;
ln = null;
}
// 循环到lastRun指向的数据即可,后续不需要再遍历
for (Node<K,V> p = f; p != lastRun; p = p.next) {
// 获取当前Node的hash值,key值,value值。
int ph = p.hash; K pk = p.key; V pv = p.val;
// 如果hash&n为0,挂到lowNode上
if ((ph & n) == 0)
ln = new Node<K,V>(ph, pk, pv, ln);
// 如果hash&n为n,挂到highNode上
else
hn = new Node<K,V>(ph, pk, pv, hn);
}
// 采用CAS的方式,将ln挂到新数组的原位置
setTabAt(nextTab, i, ln);
// 采用CAS的方式,将hn挂到新数组的原位置 + 老数组长度
setTabAt(nextTab, i + n, hn);
// 采用CAS的方式,将当前桶位置设置为fwd
setTabAt(tab, i, fwd);
// advance设置为true,保证可以进入到while循环,对i进行--操作
advance = true;
}
// 省略迁移红黑树的操作
}
}
}
}
}
3.10 helpTransfer方法-协助扩容
// 在添加数据时,如果插入节点的位置的数据,hash值为-1,代表当前索引位置数据已经被迁移到了新数组
// tab:老数组
// f:数组上的Node节点
final Node<K,V>[] helpTransfer(Node<K,V>[] tab, Node<K,V> f) {
// nextTab:新数组
// sc:给sizeCtl做临时变量
Node<K,V>[] nextTab; int sc;
// 第一个判断:老数组不为null
// 第二个判断:新数组不为null (将新数组赋值给nextTab)
if (tab != null &&
(f instanceof ForwardingNode) && (nextTab = ((ForwardingNode<K,V>)f).nextTable) != null) {
// ConcurrentHashMap正在扩容
// 基于老数组长度计算扩容戳
int rs = resizeStamp(tab.length);
// 第一个判断:fwd中的新数组,和当前正在扩容的新数组是否相等。 相等:可以协助扩容。不相等:要么扩容结束,要么开启了新的扩容
// 第二个判断:老数组是否改变了。 相等:可以协助扩容。不相等:扩容结束了
// 第三个判断:如果正在扩容,sizeCtl肯定为负数,并且给sc赋值
while (nextTab == nextTable && table == tab && (sc = sizeCtl) < 0) {
// 第一个判断:将sc右移16位,判断是否与扩容戳一致。 如果不一致,说明扩容长度不一样,退出协助扩容
// 第二个、三个判断是BUG:
/*
sc == rs << 16 + 1 || 如果+1和当前sc一致,说明扩容已经到了最后检查的阶段
sc == rs << 16 + MAX_RESIZERS || 判断协助扩容的线程是否已经达到了最大值
*/
// 第四个判断:transferIndex是从高索引位置到低索引位置领取数据的一个核心属性,如果满足 小于等于0,说明任务被领光了。
if ((sc >>> RESIZE_STAMP_SHIFT) != rs ||
sc == rs + 1 ||
sc == rs + MAX_RESIZERS ||
transferIndex <= 0)
// 不需要协助扩容
break;
// 将sizeCtl + 1,进来协助扩容
if (U.compareAndSwapInt(this, SIZECTL, sc, sc + 1)) {
// 协助扩容
transfer(tab, nextTab);
break;
}
}
return nextTab;
}
return table;
}
文章来源:https://blog.csdn.net/qq_45260619/article/details/135579863
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 0062-Java运算符
- 【Java】IDEA中的JFormDesigner使用教程
- ArrayList源码学习笔记(3)
- Docker 简介及基本操作详解
- Python+Selenium+Unittest 之selenium14--WebDriver操作方法4-键盘操作
- MIT_线性代数笔记:复习二
- 【国产车规级SoC芯片型号介绍-LT9211】
- MySQL——表的内外连接
- PayPal账号被关联!跨境卖家如何自救?关于PayPal防关联你不得不知道的事!
- 微信小程序(六)tabBar的使用