HAL库配置RS485通信
发布时间:2024年01月16日
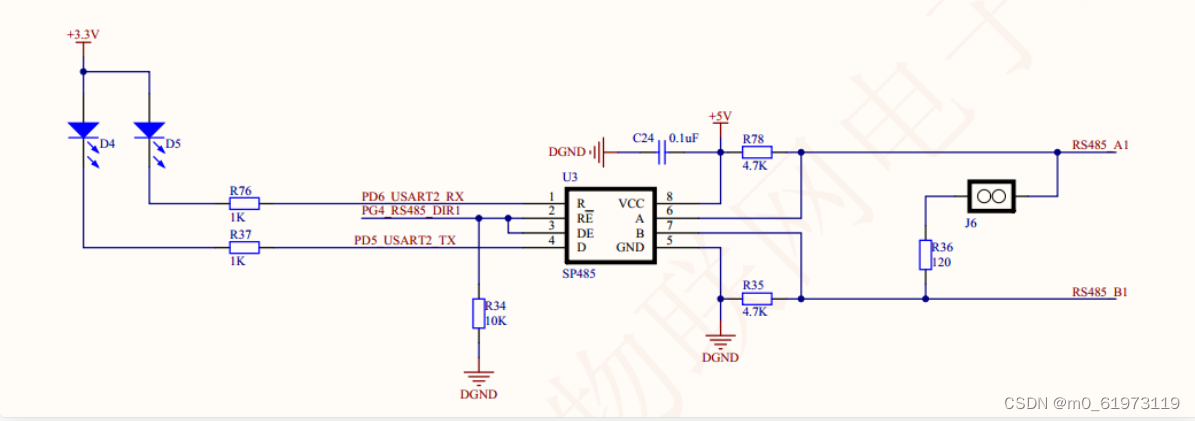
在配置好串口的基础上完成RS485的配置
一、使能RS485的发送和接收模式引脚
__HAL_RCC_GPIOG_CLK_ENABLE();
//高电平是发送模式,低电平是接收模式,默认是接收模式
HAL_GPIO_WritePin(PG4_RS485_DIR1_Port, PG4_RS485_DIR1_Pin, GPIO_PIN_RESET);
GPIO_InitStruct.Pin = PG4_RS485_DIR1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(PG4_RS485_DIR1_Port, &GPIO_InitStruct);#define RS485_Receive() HAL_GPIO_WritePin(PG4_RS485_DIR1_Port, PG4_RS485_DIR1_Pin, GPIO_PIN_RESET);
#define RS485_Send() HAL_GPIO_WritePin(PG4_RS485_DIR1_Port, PG4_RS485_DIR1_Pin, GPIO_PIN_SET);?
二、编写RS485发送函数
/**
* @description: 控制rs485发送数据
* @param {uint8_t} *data 要发送的数据
* @param {size_t} len 要发送数据的长度
* @return {*} 0 :发送成功;-1:发送失败;
*/
int Rs485_SendData(uint8_t *data, size_t len)
{
HAL_StatusTypeDef status;
RS485_Receive();
status = HAL_UART_Transmit(&huart1, data, len, 0xffff);
RS485_Send();
return status == HAL_OK ? 0 : -1;
}
?三、编写RS485接收函数
RS485默认是接收模式,在函数的初始化时会设置为接收函数,然后每次发送完数据也配置为接收
#define RXBUFFERSIZE 1 /* 缓存大小 */
uint8_t g_usart_rx_buf[200]; //接收缓冲,最大200个字节
uint16_t g_usart_rx_len; //接收长度
uint8_t g_usart_rx_flag=0; //接收完成标志
uint8_t g_rx_buffer[RXBUFFERSIZE]; /* HAL库USART接收Buffer */
在串口初始化函数中使能接收中断
/* 该函数会开启接收中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量 */
HAL_UART_Receive_IT(&huart1, (uint8_t *)g_rx_buffer, RXBUFFERSIZE);
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)
{
g_usart_rx_buf[g_usart_rx_len] = g_rx_buffer[0] ;
g_usart_rx_len++;
if(g_rx_buffer[0]==0x0a)
{
g_usart_rx_flag=1;
}
HAL_UART_Receive_IT(&huart1, (uint8_t *)g_rx_buffer, RXBUFFERSIZE);
}
}?
?
文章来源:https://blog.csdn.net/m0_61973119/article/details/135629236
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!