MIT_线性代数笔记:第 23 讲 微分方程和 exp(At)
目录
本讲中我们将面对微分方程,将一阶常系数微分方程转化为线性代数问题进行处理。主要思路基于常系数线性方程的解是指数形式,而寻找其指数和系数就是线代主要研究的问题。这里会涉及到矩阵型指数的运算 e A t e^{At} eAt。
微分方程 Differential equations
d
u
1
d
t
=
?
u
1
+
2
u
2
d
u
2
d
t
=
u
1
?
2
u
2
\begin{align*} &\frac{du_1}{dt} = -u_1 + 2u_2\\ &\frac{du_2}{dt} = u_1 -2u_2 \end{align*}
?dtdu1??=?u1?+2u2?dtdu2??=u1??2u2??
初值条件
u
1
u_1
u1? =1 ,
u
0
u_0
u0? =0
→
\rightarrow
→
d
u
d
t
=
A
u
\frac{du}{dt} = Au
dtdu?=Au,
A
=
[
?
1
2
1
?
2
]
A=\begin{bmatrix} -1 & 2 \\ 1 & -2 \end{bmatrix}
A=[?11?2?2?],u(0) =
[
1
0
]
\begin{bmatrix} 1\\0 \end{bmatrix}
[10?]
分析矩阵 A 的目的是要追踪 u 随时间的变化,而首先要做的是找到矩阵的特征值和特征变量。
A
=
[
?
1
2
1
?
2
]
A=\begin{bmatrix} -1 & 2 \\ 1 & -2 \end{bmatrix}
A=[?11?2?2?],很明显矩阵 A 为奇异矩阵,因此存在一个特征值λ1=0,而矩阵的迹为-3,因此还有一个特征值为λ2=-3。
当然我们也可以用一般方法计算
∣
A
?
λ
E
∣
=
\begin{vmatrix} A - λE \end{vmatrix} =
?A?λE?
?=
∣
?
1
?
λ
2
1
?
2
?
λ
∣
\begin{vmatrix} -1-λ& 2 \\1 & -2-λ \end{vmatrix}
??1?λ1?2?2?λ?
? =
λ
2
λ^2
λ2 +3λ =0
特征值 λ 2 λ_2 λ2? = ?3 将会逐渐消失,因为答案中将会有一项为 e ? 3 t e^{?3 t } e?3t,该项会随着时间的推移趋近于0 。答案的另一部分将有一项为 e 0 t e^{0t} e0t,该项是一个常数,其值为1,并不随时间而改变。通常含有0 特征值的矩阵会随着时间的推移达到稳态。
一阶线性微分方程的解的形式是
e
λ
t
e^{λt}
eλt。两个特征值中,1 会使结果达到稳态,而-3 所对应的 e-3t会随时间增大而变小 。
方程的通解为 U(t) =
c
1
e
λ
1
t
X
1
c_1e^{λ_1t} X_1
c1?eλ1?tX1? +
c
2
e
λ
2
t
X
2
c_2e^{λ_2t} X_2
c2?eλ2?tX2?。
将
λ
1
λ_1
λ1? = 0,
λ
2
λ_2
λ2? = ?3代入( A - λI )x =0,分别求得对应的特征向量 x1=
[
2
1
]
\begin{bmatrix} 2\\1 \end{bmatrix}
[21?] ,x2=
[
1
?
1
]
\begin{bmatrix} 1\\-1 \end{bmatrix}
[1?1?]。
U(t) =
c
1
e
λ
1
t
X
1
c_1e^{λ_1t} X_1
c1?eλ1?tX1? +
c
2
e
λ
2
t
X
2
c_2e^{λ_2t} X_2
c2?eλ2?tX2? =
c
1
e
0
[
2
1
]
+
c_1e^{0} \begin{bmatrix} 2\\1 \end{bmatrix}+
c1?e0[21?]+
c
2
e
?
3
t
[
1
?
1
]
c_2e^{-3t} \begin{bmatrix} 1\\ -1 \end{bmatrix}
c2?e?3t[1?1?]
U(0) =
c
1
[
2
1
]
c_1 \begin{bmatrix} 2\\1 \end{bmatrix}
c1?[21?] +
c
2
e
?
3
t
[
1
?
1
]
c_2e^{-3t} \begin{bmatrix} 1\\ -1 \end{bmatrix}
c2?e?3t[1?1?] =
[
1
0
]
\begin{bmatrix} 1\\0 \end{bmatrix}
[10?],可解得
c
1
c_1
c1?=
c
2
c_2
c2? = 1/3。
因此 U(t) =
1
3
[
2
1
]
\frac{1}{3} \begin{bmatrix} 2\\1 \end{bmatrix}
31?[21?] +
1
3
e
?
3
t
[
1
?
1
]
\frac{1}{3}e^{-3t} \begin{bmatrix} 1\\ -1 \end{bmatrix}
31?e?3t[1?1?] ,前一项为稳定状态,后一项随着时间衰减。
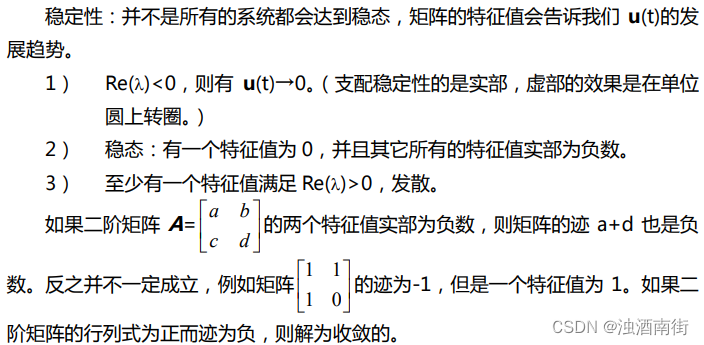
稳定性:
在方程
d
U
d
t
\frac{dU}{dt}
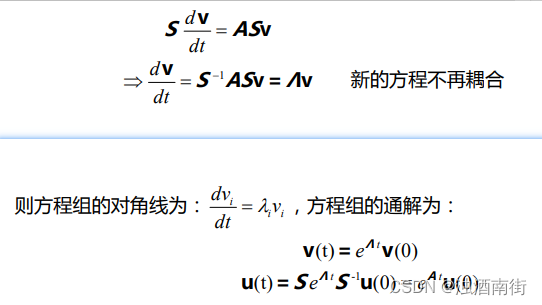
dtdU? = Au中,矩阵 A 的状态表明不同分量之间相互耦合,而用特征值和特征向量处理进行对角化是为了解耦。令 u=Sv,其中 S 是由矩阵 A 的特征向量组成。则有:
矩阵指数函数 Matrix exponential e A t e^{At} eAt
我们可以用幂级数的公式:
e x = ∑ n = 0 ∞ x n n ! = 1 + x + x 2 2 + x 3 6 + . . . . . . e^x =\sum_{n=0}^∞ {\frac{x^n}{n!}} = 1+x+\frac{x^2}{2} + \frac{x^3}{6} + ...... ex=n=0∑∞?n!xn?=1+x+2x2?+6x3?+......
来定义矩阵型指数运算 e A t e^{At} eAt:
e A t = I + A t + ( A t ) 2 2 + ( A t ) 3 6 + . . . . . e^{At} = I + At + \frac{(At)^2}{2}+ \frac{(At)^3}{6} + ..... eAt=I+At+2(At)2?+6(At)3?+.....
如果 At 的特征值很小,满足收敛条件 ∣ λ ( A t ) ∣ \begin{vmatrix} λ(At) \end{vmatrix} ?λ(At)? ? <1,则可以用几何级数来定义矩阵型指数:
1 1 ? x = ∑ n = 0 ∞ x n → ( I + A t ) ? 1 = I + A t + ( A t ) 2 + ( A t ) 3 + . . . . . \frac{1}{1- x } = \sum_{n=0}^∞x^n \rightarrow ( I + At )^{-1} = I + At + (At)^2+ (At)^3 + ..... 1?x1?=n=0∑∞?xn→(I+At)?1=I+At+(At)2+(At)3+.....
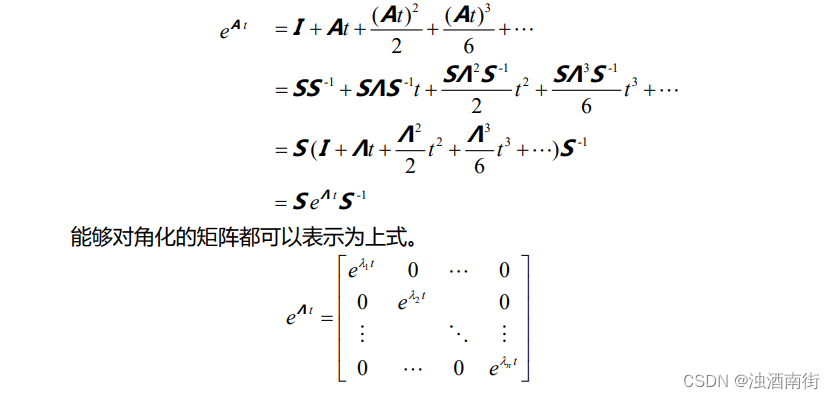
前文中我们已经写出了矩阵指数函数的公式
e
A
t
e^{ At}
eAt =
S
e
Λ
t
S
?
1
Se^{Λt}S^{-1}
SeΛtS?1 。如果矩阵 A 具有 n个线性无关的特征向量,我们可以从幂级数定义的矩阵指数公式来再次验证:
二阶微分方程 Second order differential equations
我们可以将二阶微分方程 y ′ ′ + b y ′ + k y y^{''} +by^{'} +ky y′′+by′+ky =0 转化为 2 x 2 的一阶问题进行处理,构造方法类似于我们对斐波那契数列的处理方法。
令u = [ y ′ y ] \begin{bmatrix} y^{'}\\y \end{bmatrix} [y′y?] ,则有 u ′ = [ y ′ ′ y ′ ] = [ ? b ? k 1 0 ] [ y ′ y ] u^{'} =\begin{bmatrix} y^{''}\\y^{'} \end{bmatrix} =\begin{bmatrix} -b & -k \\ 1 & 0 \end{bmatrix}\begin{bmatrix} y^{'}\\y \end{bmatrix} u′=[y′′y′?]=[?b1??k0?][y′y?]
如果是 k 阶微分方程,那么需要一个 k x k 矩阵,除了第一行和对角线下面一排斜线上的元素之外,这个系数矩阵其它元素均为 0。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 汽车检测线设备生产厂家公司
- Windows下载并配置Kettle
- 【揭秘】武汉建筑安全员ABC证报考内幕,社保问题竟成硬伤!
- 【7-zip密码】7-Zip如何取消文件加密的密码
- java并发体系----并发集合---ConcurrentSkipListMap&ConcurrentSkipListSet
- 【书生·浦语大模型实战营第6课】OpenCompass大模型评测
- 【HDFS联邦(1)】ViewFs与联邦理论知识详解
- 40 个简单又有效的 Linux Shell 脚本示例
- 05-python之函数-函数的定义/函数的参数/函数返回值/函数说明文档/函数的嵌套使用/函数变量的作用域
- 【Python百宝箱】抓取世界:网络爬虫和数据提取全家桶