pytorch强化学习(1)——DQN&SARSA
发布时间:2023年12月17日
实验环境
python=3.10
torch=2.1.1
gym=0.26.2
gym[classic_control]
matplotlib=3.8.0
numpy=1.26.2
DQN代码
首先是module.py代码,在这里定义了网络模型和DQN模型
import torch
import torch.nn as nn
import numpy as np
class Net(nn.Module):
# 构造只有一个隐含层的网络
def __init__(self, n_states, n_hidden, n_actions):
super(Net, self).__init__()
# [b,n_states]-->[b,n_hidden]
self.network = nn.Sequential(
torch.nn.Linear(n_states, n_hidden),
torch.nn.ReLU(),
torch.nn.Linear(n_hidden, n_actions)
)
# 前传
def forward(self, x): # [b,n_states]
return self.network(x)
class DQN:
def __init__(self, n_states, n_hidden, n_actions, lr, gamma, epsilon):
# 属性分配
self.n_states = n_states # 状态的特征数
self.n_hidden = n_hidden # 隐含层个数
self.n_actions = n_actions # 动作数
self.lr = lr # 训练时的学习率
self.gamma = gamma # 折扣因子,对下一状态的回报的缩放
self.epsilon = epsilon # 贪婪策略,有1-epsilon的概率探索
# 计数器,记录迭代次数
self.count = 0
# 实例化训练网络
self.q_net = Net(self.n_states, self.n_hidden, self.n_actions)
# 优化器,更新训练网络的参数
self.optimizer = torch.optim.Adam(self.q_net.parameters(), lr=lr)
self.criterion = torch.nn.MSELoss() # 损失函数
def choose_action(self, gym_state):
state = torch.Tensor(gym_state)
if np.random.random() < self.epsilon:
action_values = self.q_net(state) # q_net(state)采取动作后的预测
action = action_values.argmax().item()
else:
# 随机选择一个动作
action = np.random.randint(self.n_actions)
return action
def update(self, gym_state, action, reward, next_gym_state, done):
state, next_state = torch.tensor(gym_state), torch.tensor(next_gym_state)
q_value = self.q_net(state)[action]
# 前千万不能缺少done,如果下一步游戏结束的花,那下一步的q值应该为0
q_target = reward + self.gamma * self.q_net(next_state).max() * (1 - float(done))
self.optimizer.zero_grad()
dqn_loss = self.criterion(q_value, q_target)
dqn_loss.backward()
self.optimizer.step()
然后是train.py代码,在这里调用DQN模型和gym环境,来进行训练:
import gym
import torch
from module import DQN
import matplotlib.pyplot as plt
lr = 1e-3 # 学习率
gamma = 0.95 # 折扣因子
epsilon = 0.8 # 贪心系数
n_hidden = 200 # 隐含层神经元个数
env = gym.make("CartPole-v1")
n_states = env.observation_space.shape[0] # 4
n_actions = env.action_space.n # 2 动作的个数
dqn = DQN(n_states, n_hidden, n_actions, lr, gamma, epsilon)
if __name__ == '__main__':
reward_list = []
for i in range(500):
state = env.reset()[0] # len=4
total_reward = 0
done = False
while True:
# 获取当前状态下需要采取的动作
action = dqn.choose_action(state)
# 更新环境
next_state, reward, done, _, _ = env.step(action)
dqn.update(state, action, reward, next_state, done)
state = next_state
total_reward += reward
if done:
break
print("第%d回合,total_reward=%f" % (i, total_reward))
reward_list.append(total_reward)
# 绘图
episodes_list = list(range(len(reward_list)))
plt.plot(episodes_list, reward_list)
plt.xlabel('Episodes')
plt.ylabel('Returns')
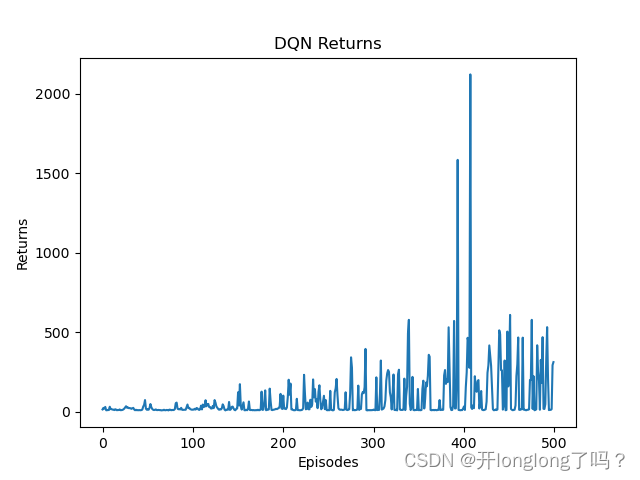
plt.title('DQN Returns')
plt.show()
SARSA代码
首先是module.py代码,在这里定义了网络模型和SARSA模型。
SARSA和DQN基本相同,只有在更新Q网络的时候略有不同,已在代码相应位置做出注释。
import torch
import torch.nn as nn
import numpy as np
import torch.nn.functional as F
class Net(nn.Module):
# 构造只有一个隐含层的网络
def __init__(self, n_states, n_hidden, n_actions):
super(Net, self).__init__()
# [b,n_states]-->[b,n_hidden]
self.network = nn.Sequential(
torch.nn.Linear(n_states, n_hidden),
torch.nn.ReLU(),
torch.nn.Linear(n_hidden, n_actions)
)
# 前传
def forward(self, x): # [b,n_states]
return self.network(x)
class SARSA:
def __init__(self, n_states, n_hidden, n_actions, lr, gamma, epsilon):
# 属性分配
self.n_states = n_states # 状态的特征数
self.n_hidden = n_hidden # 隐含层个数
self.n_actions = n_actions # 动作数
self.lr = lr # 训练时的学习率
self.gamma = gamma # 折扣因子,对下一状态的回报的缩放
self.epsilon = epsilon # 贪婪策略,有1-epsilon的概率探索
# 计数器,记录迭代次数
self.count = 0
# 实例化训练网络
self.q_net = Net(self.n_states, self.n_hidden, self.n_actions)
# 优化器,更新训练网络的参数
self.optimizer = torch.optim.Adam(self.q_net.parameters(), lr=lr)
self.criterion = torch.nn.MSELoss() # 损失函数
def choose_action(self, gym_state):
state = torch.Tensor(gym_state)
# 基于贪婪系数,有一定概率采取随机策略
if np.random.random() < self.epsilon:
action_values = self.q_net(state) # q_net(state)是在当前状态采取各个动作后的预测
action = action_values.argmax().item()
else:
# 随机选择一个动作
action = np.random.randint(self.n_actions)
return action
def update(self, gym_state, action, reward, next_gym_state, done):
state, next_state = torch.tensor(gym_state), torch.tensor(next_gym_state)
q_value = self.q_net(state)[action]
'''
sarsa在更新网络时选择的是q_net(next_state)[next_action]
这是sarsa算法和dqn的唯一不同
dqn是选择max(q_net(next))
'''
next_action = self.choose_action(next_state)
# 千万不能缺少done,如果下一步游戏结束的话,那下一步的q值应该为0,而不是q网络输出的值
q_target = reward + self.gamma * self.q_net(next_state)[next_action] * (1 - float(done))
self.optimizer.zero_grad()
dqn_loss = self.criterion(q_value, q_target)
dqn_loss.backward()
self.optimizer.step()
SARSA也有tarin.py文件,功能和上面DQN的一样,内容也几乎完全一样,只是把DQN的名字改成SARSA而已,所以在这里不再赘述。
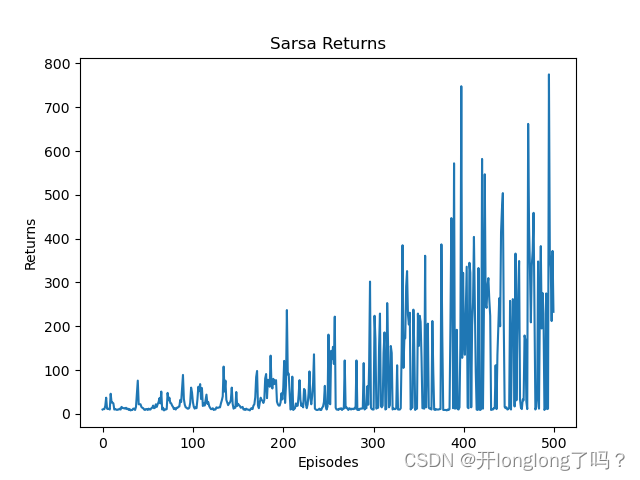
运行结果
DQN的运行结果如下:
SARSA运行结果如下:
文章来源:https://blog.csdn.net/m0_52744273/article/details/134968432
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- CSS 选择器全攻略:从入门到精通(上)
- 工业企业能源管理平台,可以帮助企业解决哪些方面的能源问题?
- (每日持续更新)jdk api之BufferedReader基础
- 【打卡】牛客网:BM91 反转字符串
- 如何编写有效的WBS?
- 绕某个点旋转
- 【fly-iot飞凡物联】(15):IOT项目使用TDengine数据库,进行技术调研,本地使用docker启动成功,可以使用python进行连接数据插入。
- (每日持续更新)信息系统项目管理(第四版)(高级项目管理)考试重点整理第3章 信息系统治理(二)
- pyhton3中通过matplotlib做图表,导入excel制成图表
- 2023 我的编程之旅——路人贾‘ω‘