ROS笔记之rosbag的快速切片(C++实现)
发布时间:2023年12月22日
ROS笔记之rosbag的快速切片(C++实现)
—— 杭州 2023-12-21 夜
code review
文章目录
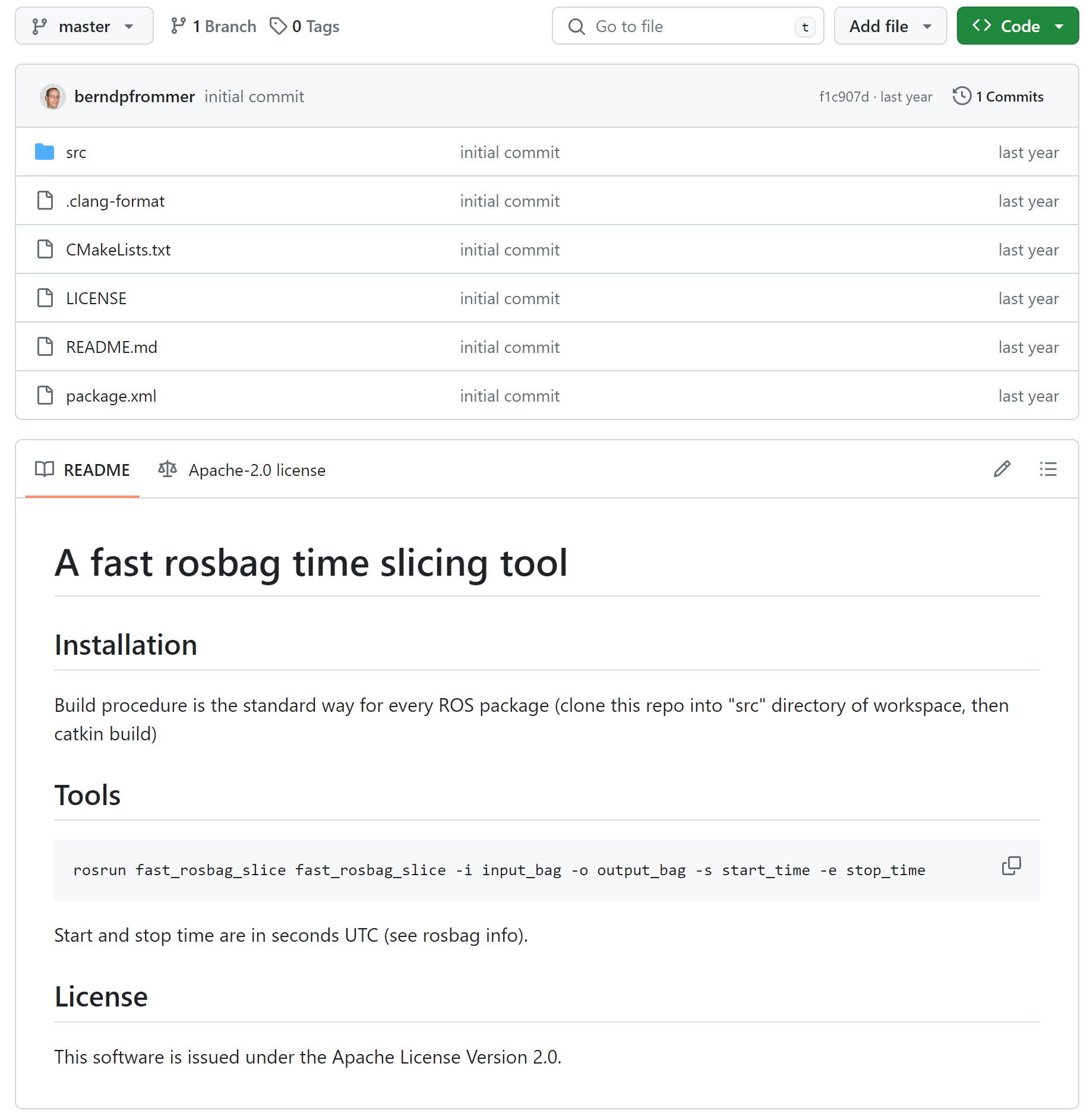
正常该功能是ROS官方命令行:rosbag filter来实现,但速度太慢.
代码抄自大佬的Github:https://github.com/berndpfrommer/fast_rosbag_slice.git
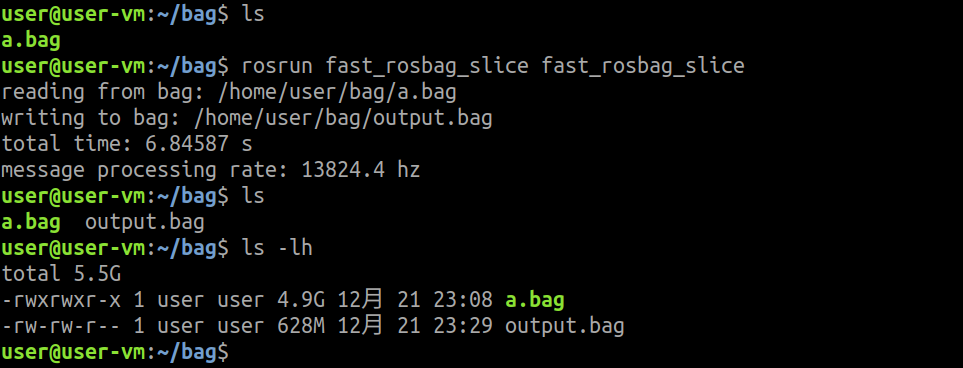
1.运行效果
-
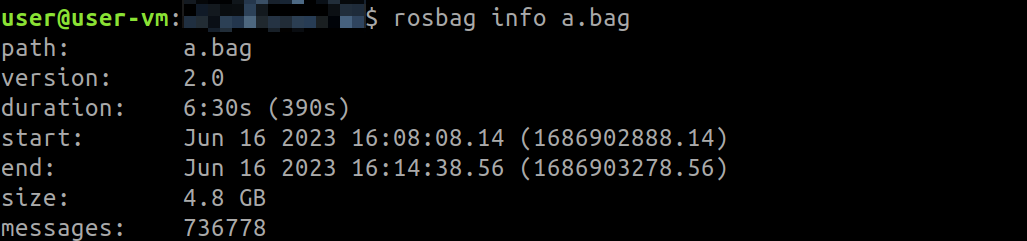
input_bag的情况
-
运行,想得到后50s的bag
rosrun fast_rosbag_slice fast_rosbag_slice -i a.bag -o output.bag -s 1686903228.56 -e 1686903278.56

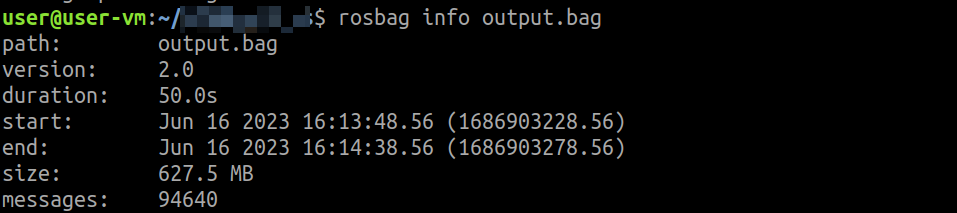
耗时8.68s(windows虚拟机环境)
- output_bag的情况
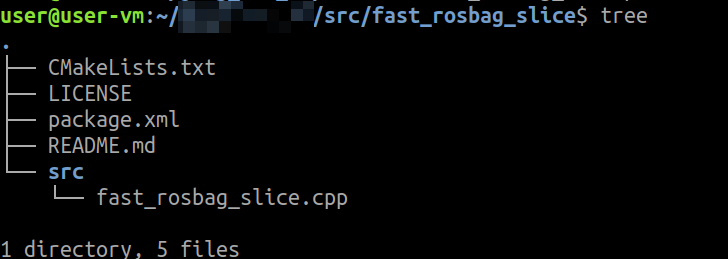
2.文件结构
3.fast_rosbag_slice.cpp
// -*-c++-*--------------------------------------------------------------------
// Copyright 2022 Bernd Pfrommer <bernd.pfrommer@gmail.com>
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include <rosbag/bag.h>
#include <rosbag/view.h>
#include <unistd.h>
#include <chrono>
#include <iostream>
#include <limits>
void usage()
{
std::cout << "usage:" << std::endl;
std::cout << "fast_rosbag_slice -i input_bag -o output_bag -s start_time -e stop_time "
<< std::endl;
}
static size_t process_bag(
const std::string & inBagName, const std::string & outBagName, const double startTime,
const double endTime)
{
std::cout << "reading from bag: " << inBagName << std::endl;
std::cout << "writing to bag: " << outBagName << std::endl;
rosbag::Bag inBag;
inBag.open(inBagName, rosbag::bagmode::Read);
rosbag::Bag outBag;
outBag.open(outBagName, rosbag::bagmode::Write);
rosbag::View view(inBag);
size_t numMessages(0);
for (const rosbag::MessageInstance & m : view) {
if (m.getTime().toSec() > endTime) {
break;
}
if (m.getTime().toSec() >= startTime) {
outBag.write(m.getTopic(), m.getTime(), m);
numMessages++;
}
}
inBag.close();
outBag.close();
return (numMessages);
}
int main(int argc, char ** argv)
{
int opt;
ros::Time::init();
std::string inBag;
std::string outBag;
double startTime(0);
double endTime(std::numeric_limits<double>::max());
while ((opt = getopt(argc, argv, "i:o:s:e:h")) != -1) {
switch (opt) {
case 'i':
inBag = optarg;
break;
case 'o':
outBag = optarg;
break;
case 's':
startTime = atof(optarg);
break;
case 'e':
endTime = atof(optarg);
break;
case 'h':
usage();
return (-1);
default:
std::cout << "unknown option: " << opt << std::endl;
usage();
return (-1);
break;
}
}
if (inBag.empty() || outBag.empty()) {
std::cout << "missing input or output bag name!" << std::endl;
usage();
return (-1);
}
const auto start = std::chrono::high_resolution_clock::now();
size_t numMsg = process_bag(inBag, outBag, startTime, endTime);
const auto end = std::chrono::high_resolution_clock::now();
auto total_duration = std::chrono::duration_cast<std::chrono::microseconds>(end - start).count();
std::cout << "total time: " << total_duration * 1e-6 << " s" << std::endl;
std::cout << "message processing rate: " << numMsg * 1e6 / total_duration << " hz" << std::endl;
return (0);
}
4.CMakeLists.txt
#
# Copyright 2022 Bernd Pfrommer <bernd.pfrommer@gmail.com>
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
cmake_minimum_required(VERSION 3.5)
project(fast_rosbag_slice)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -g -Wall -Wextra -Wpedantic -Werror")
set (CMAKE_CXX_STANDARD 14)
find_package(catkin REQUIRED COMPONENTS
roscpp
rosbag
)
catkin_package()
include_directories(
${catkin_INCLUDE_DIRS}
)
# --------- sync test
add_executable(fast_rosbag_slice src/fast_rosbag_slice.cpp)
target_link_libraries(fast_rosbag_slice ${catkin_LIBRARIES})
#
# volumetric tracking node and nodelet
#
install(TARGETS fast_rosbag_slice
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
)
5.package.xml
<?xml version="1.0"?>
<package format="3">
<name>fast_rosbag_slice</name>
<version>1.0.0</version>
<description>fast rosbag time slicer</description>
<maintainer email="bernd.pfrommer@gmail.com">Bernd Pfrommer</maintainer>
<license>Apache2</license>
<buildtool_depend condition="$ROS_VERSION == 1">catkin</buildtool_depend>
<depend condition="$ROS_VERSION == 1">roscpp</depend>
<depend condition="$ROS_VERSION == 1">rosbag</depend>
<export>
<build_type condition="$ROS_VERSION == 1">catkin</build_type>
</export>
</package>
6.对fast_rosbag_slice.cpp进行函数封装
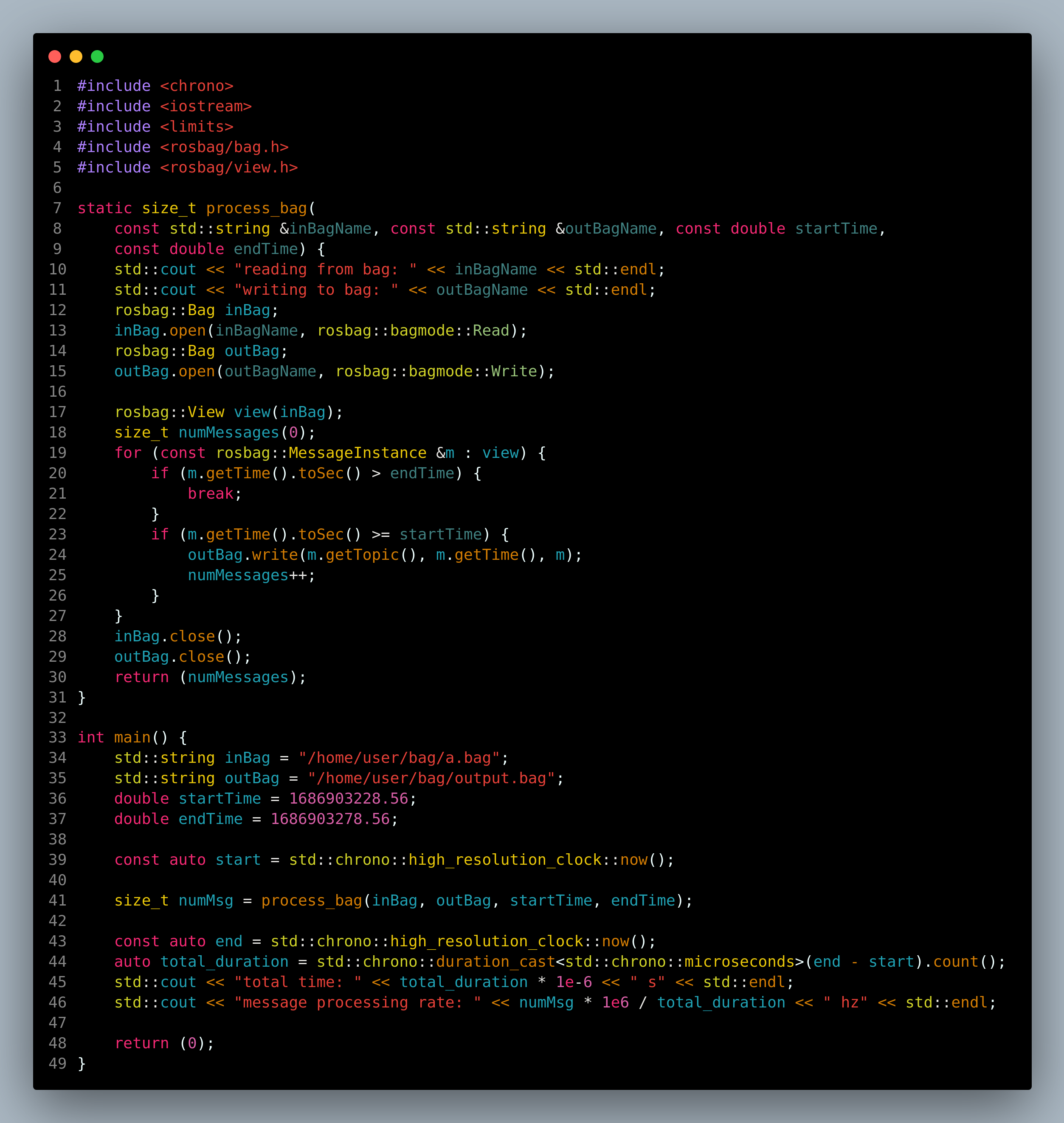
运行
代码
#include <chrono>
#include <iostream>
#include <limits>
#include <rosbag/bag.h>
#include <rosbag/view.h>
static size_t process_bag(
const std::string &inBagName, const std::string &outBagName, const double startTime,
const double endTime) {
std::cout << "reading from bag: " << inBagName << std::endl;
std::cout << "writing to bag: " << outBagName << std::endl;
rosbag::Bag inBag;
inBag.open(inBagName, rosbag::bagmode::Read);
rosbag::Bag outBag;
outBag.open(outBagName, rosbag::bagmode::Write);
rosbag::View view(inBag);
size_t numMessages(0);
for (const rosbag::MessageInstance &m : view) {
if (m.getTime().toSec() > endTime) {
break;
}
if (m.getTime().toSec() >= startTime) {
outBag.write(m.getTopic(), m.getTime(), m);
numMessages++;
}
}
inBag.close();
outBag.close();
return (numMessages);
}
int main() {
std::string inBag = "/home/user/bag/a.bag";
std::string outBag = "/home/user/bag/output.bag";
double startTime = 1686903228.56;
double endTime = 1686903278.56;
const auto start = std::chrono::high_resolution_clock::now();
size_t numMsg = process_bag(inBag, outBag, startTime, endTime);
const auto end = std::chrono::high_resolution_clock::now();
auto total_duration = std::chrono::duration_cast<std::chrono::microseconds>(end - start).count();
std::cout << "total time: " << total_duration * 1e-6 << " s" << std::endl;
std::cout << "message processing rate: " << numMsg * 1e6 / total_duration << " hz" << std::endl;
return (0);
}
文章来源:https://blog.csdn.net/weixin_43297891/article/details/135142715
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【?电力电子在电力系统中的应用?】5 三相锁相环(PLL)&滞环电流跟踪控制PWM
- 基于JavaWeb+BS架构+SpringBoot+Vue智慧党建系统设计与实现
- R语言使用小技巧
- 算法学习浅谈
- 【算法】激光炸弹(二维数组前缀和)
- GRU算法
- 数据结构 | 二叉树的遍历(递归&非递归)
- 项目框架构建之2:主机程序的搭建
- 获取网页信息
- 从 Google Gemini 到 OpenAI Q*(Q-Star):调研重塑生成人工智能(AI)的研究