凸包算法--物体表面积/体积计算--python版
发布时间:2023年12月27日
环境:
Open3D
1.1 凸包法介绍:
用于找到包围给定点集的最小凸多边形或凸多面体
常用的凸包算法:
Grabam扫描法(适用三维层面)
Jarvis卷包裹法(不适用三维层面)
Clarkson-Shor
QuickHull
2.1 python代码
import open3d as o3d
import numpy as np
def draw_point_cloud(result):
for geometry in result:
o3d.visualization.draw_geometries([geometry], "result", 800, 600,
50, 50, False, False, True)
def main():
np.random.seed(42) # 设置随机种子以确保可重复性
# 随机生成点云数据
num_points = 1000
points = np.random.rand(num_points, 3) * 10 # 在[0, 10)范围内生成点
pc = o3d.geometry.PointCloud()
pc.points = o3d.utility.Vector3dVector(points)
result = [pc]
# 凸包算法
tm, tm_ls = o3d.geometry.TriangleMesh(), o3d.geometry.LineSet()
res = pc.compute_convex_hull()
tm, _ = res
tm.compute_vertex_normals(True)
tm_ls = o3d.geometry.LineSet.create_from_triangle_mesh(tm)
color = np.random.rand(3)
# 将tm_ls.lines转换为NumPy数组
lines_np = np.asarray(tm_ls.lines)
colors = np.tile(color, (lines_np.shape[0], 1))
tm_ls.colors = o3d.utility.Vector3dVector(colors)
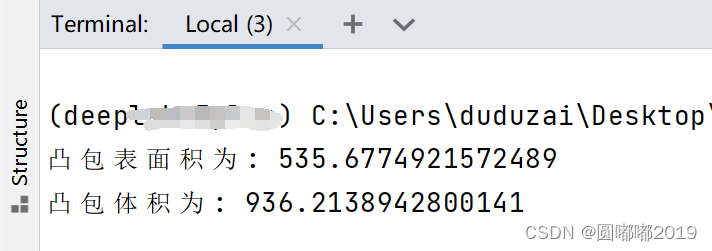
print(f"凸包表面积为: {tm.get_surface_area()}")
print(f"凸包体积为: {tm.get_volume()}")
convex_hull_index = res[1]
convex_hull_point = pc.select_by_index(convex_hull_index)
convex_hull_point.paint_uniform_color([1, 0, 0])
result.extend([convex_hull_point, tm_ls, tm])
draw_point_cloud(result)
if __name__ == "__main__":
main()
3.1 可视化

4.1 体积/表面积Calculation
文章来源:https://blog.csdn.net/qq_42227760/article/details/135245677
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【好书推荐-第二期】《实战AI大模型 》:带你走进大模型GPTs、AIGC的世界(李开复、周鸿祎、颜水成倾力推荐)
- 肇庆韶关异形件上门扫描服务龙岗3D抄数画图福田电脑抄数STL转STP
- 实现中文jieba分词
- 住宅IP VPS的應用指南
- OPC UA 与PROFINET比较
- Qt跨线程的槽函数执行
- 【Verilog】基于Verilog的DDR控制器的简单实现(一)——初始化
- Mybatis简易搭建并查询数据库表内所有数据
- Ubuntu本地快速搭建web小游戏网站,公网用户远程访问
- 使用VS2017在win10 x64上编译调试FFmpeg(附源码和虚拟机下载)