ROS Gazebo的基本使用
Gazebo 提供了一个实时的三维虚拟环境,用于模拟各种复杂的真实世界条件,包括光照、地形、物理碰撞以及传感器模型(如激光雷达、摄像头等)。通过 ROS 和 Gazebo 的结合,开发者可以在无需实际硬件的情况下设计、测试和验证机器人算法及系统。
一、Gazebo 的主要特点:
????三维仿真:提供高保真度的视觉效果和真实的物理引擎,使得机器人的运动和交互行为能够尽可能接近真实情况。
????丰富的模型库:内置了大量不同类型的机器人模型和环境组件,用户也可以自定义模型并导入到 Gazebo 中使用。
????传感器模拟:支持多种传感器的模拟,包括但不限于激光雷达、深度相机、RGB-D相机、IMU 等,这些传感器的数据可以以 ROS 消息的形式发布出来供其他节点订阅处理。
????实时仿真:支持实时或非实时运行,允许调整时间步长来满足不同的性能需求。
????API接口:提供了 C++ 和 Python API,方便用户编写自定义逻辑并与仿真环境交互。
二、URDF 与 Gazebo 集成流程
主要步骤如下:
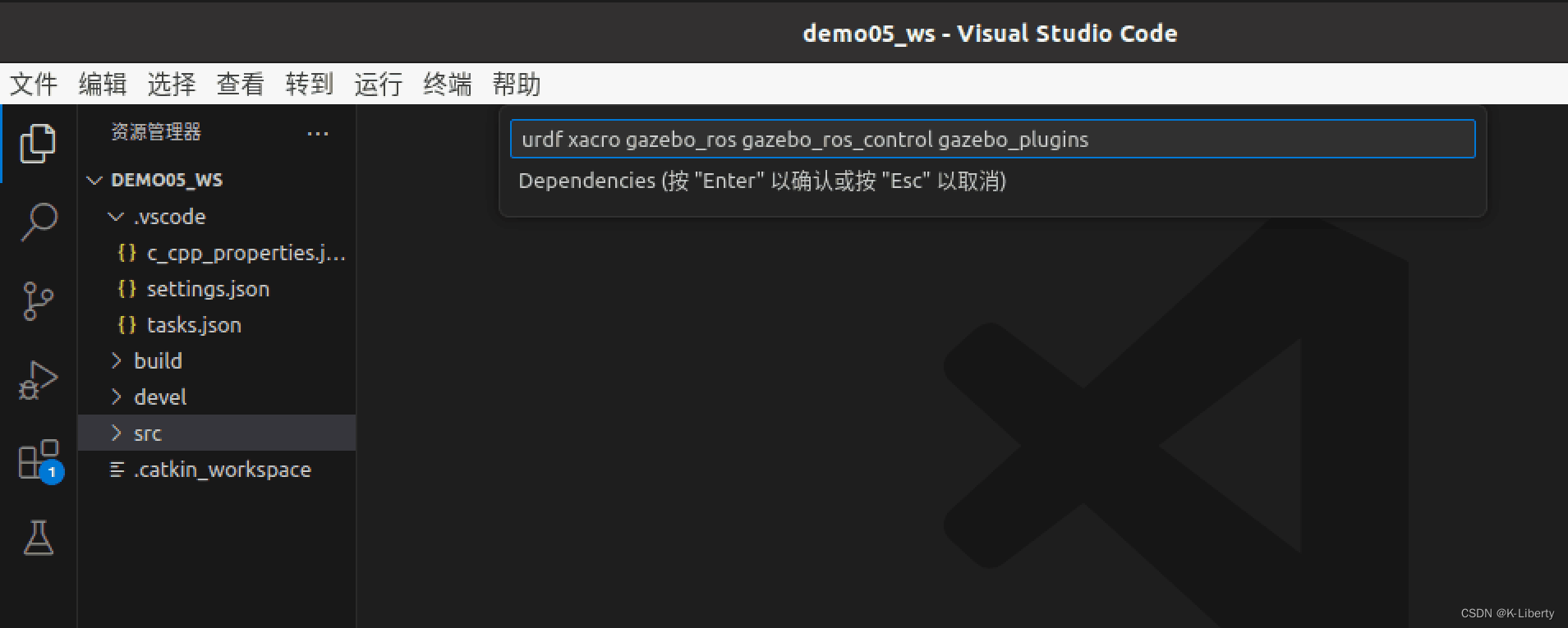
1、创建功能包,导入依赖项
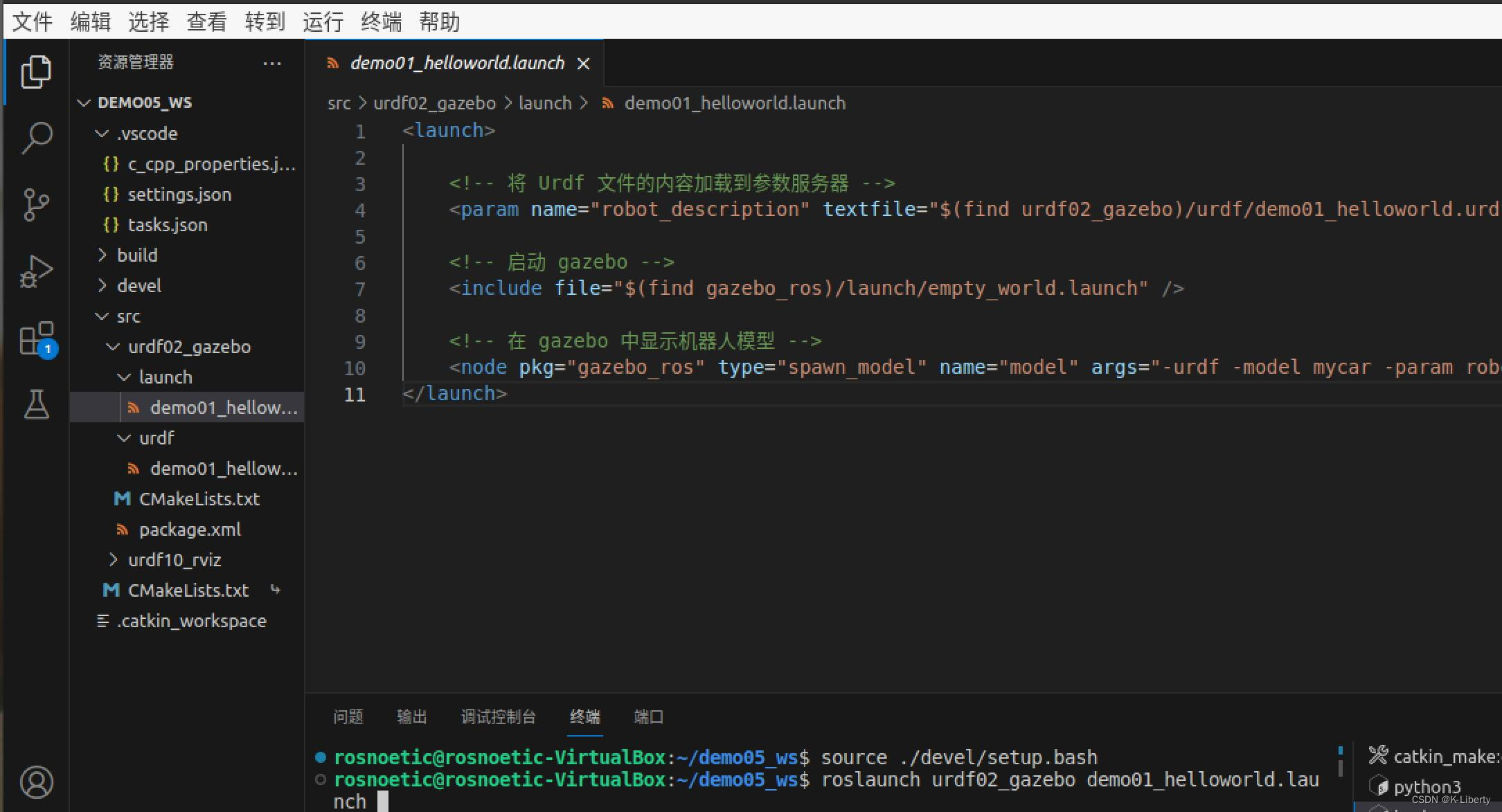
2、编写 URDF 或 Xacro 文件
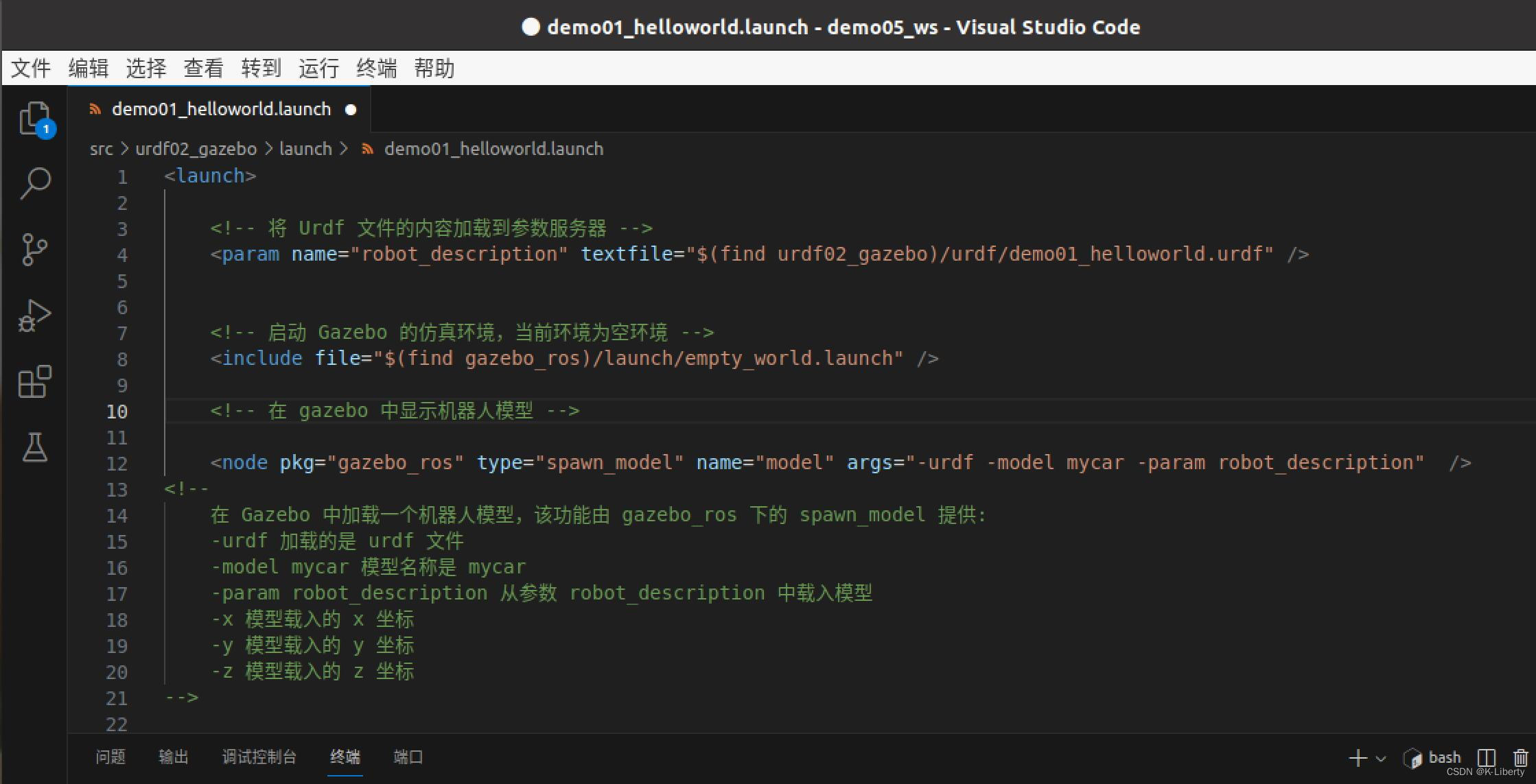
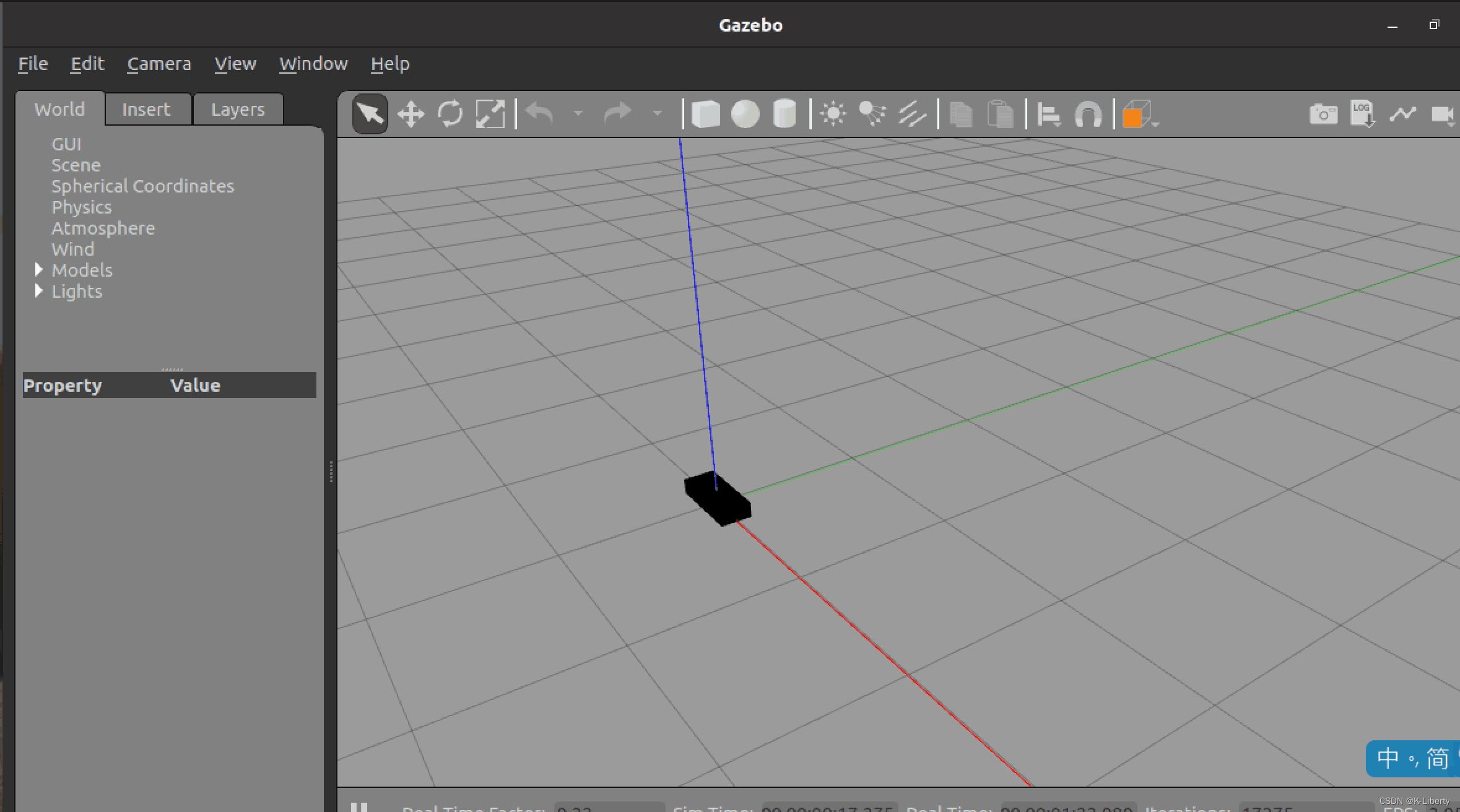
3、启动 Gazebo 并显示机器人模型
导入依赖包: urdf、xacro、gazebo_ros、gazebo_ros_control、gazebo_plugins
三、URDF集成Gazebo相关设置
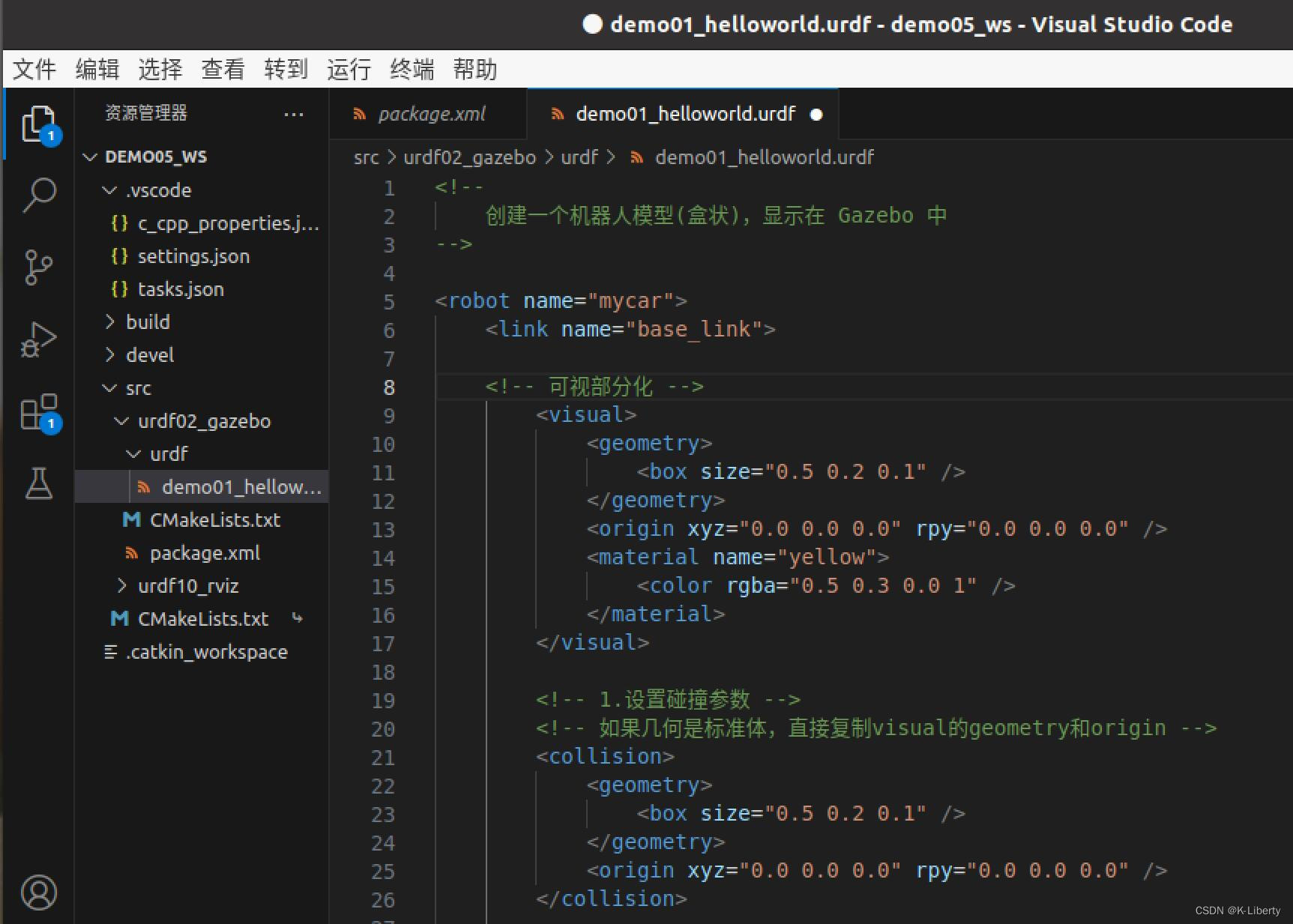
1.collision
若机器人link是标准的几何体形状,和link的 visual 部分属性设置一致。
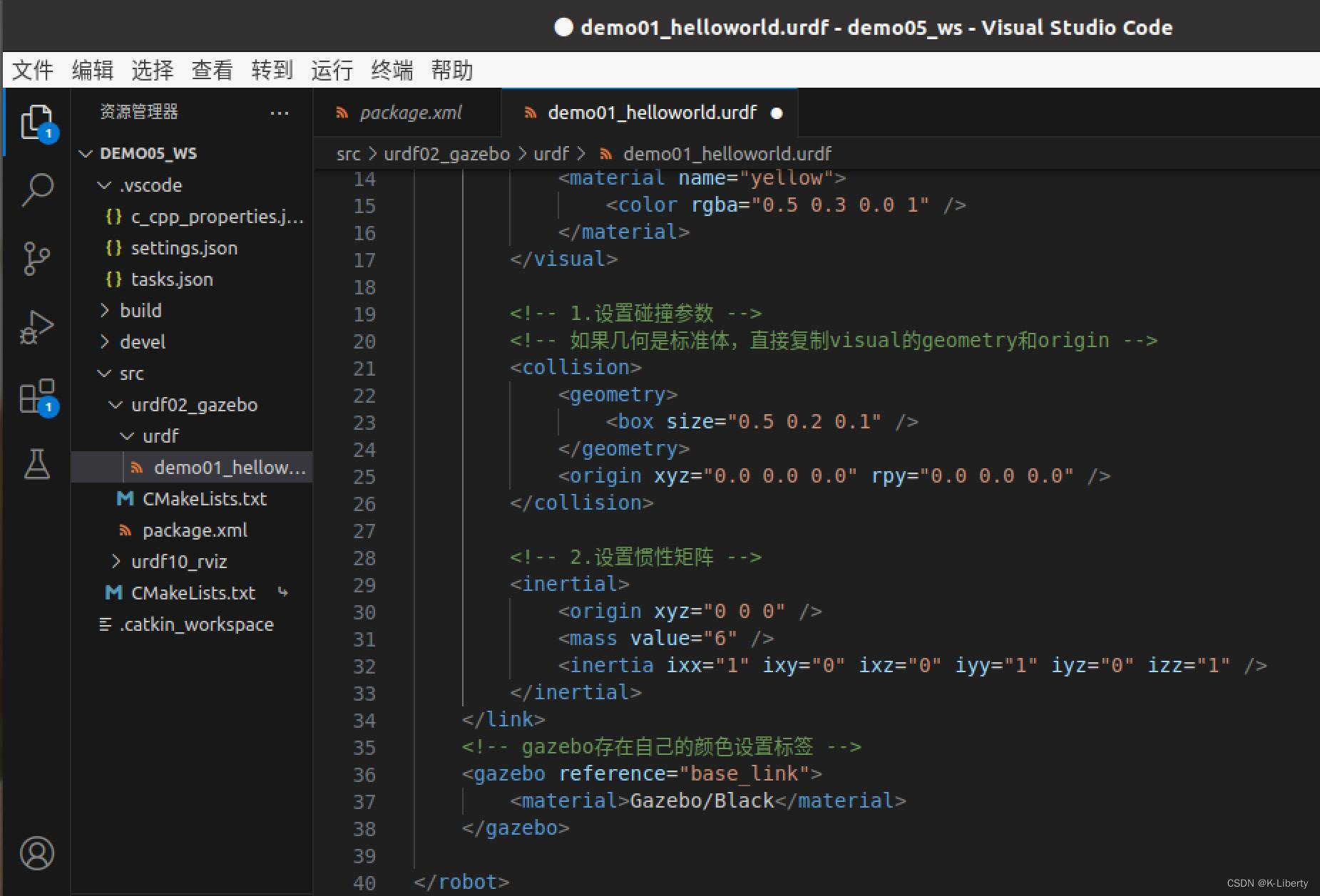
2.inertial
惯性矩阵的设置需要结合link的质量与外形参数动态生成
注意:除了 base_footprint 外,机器人的每个刚体部分都需要设置惯性矩阵,且惯性矩阵必须经计算得出,如果随意定义刚体部分的惯性矩阵,那么可能会导致机器人在 Gazebo 中出现抖动,移动等现象。
3.颜色设置
在 gazebo 中显示 link 的颜色,必须要使用指定的标签:
<gazebo reference="link节点名称">
?????<material>Gazebo/Blue</material>
</gazebo>
注意:material 标签中,设置的值区分大小写。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- ts字面量类型
- 在线答题考试小程序源码系统: 在线刷题考试二合一 +完整的代码包+搭建教程
- leetcode:2717. 半有序排列(python3解法)
- 大数据机器学习深度解读DBSCAN聚类算法:技术与实战全解析
- 全面了解网络性能监测:从哪些方面进行监测?
- 2023年12月【考试战报】|ORACLE OCP 19C考试通过
- Gradio: 实时性能反馈的机器学习演示工具 | 开源日报 No.107
- C++编译之级联cmake
- 【Unity】URP报错Object reference not set to an instance of an object
- Spring Boot+RocketMQ 实现多实例分布式环境下的事件驱动