CV算法面试题学习
发布时间:2023年12月23日
本文记录了CV算法题的学习。
CV算法面试题学习
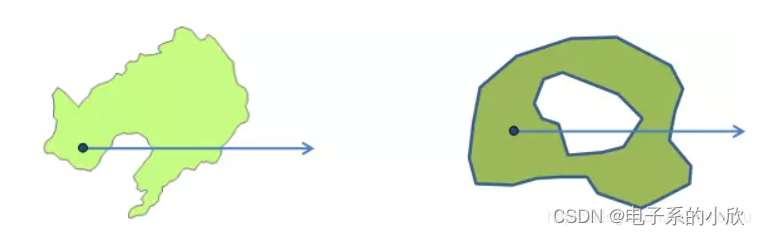
点在多边形内(point in polygon)
参考自文章1,其提供的代码没有考虑一些特殊情况,所以做了改进。
做法:射线法。以待判断点A为端点,画出方向水平朝右的射线,统计该射线与多边形B的交点个数。奇数:内,偶数:外。(需考虑点A是否在B的某个点或边上是否有平行的边。)
图片来自:https://www.jianshu.com/p/ba03c600a557。
代码:
def is_in_poly(p, poly):
"""
:param p: [x, y]
:param poly: [[], [], [], [], ...]
:return:
"""
px, py = p
is_in = False
for i, corner in enumerate(poly):
next_i = i + 1 if i + 1 < len(poly) else 0
x1, y1 = corner
x2, y2 = poly[next_i]
if (x1 == px and y1 == py) or (x2 == px and y2 == py): # 点p是否在多边形的某个点上
is_in = True
break
if y1 == y2 : #边是水平的,如果点在边上则break,如果不在,则跳过这一轮判断
if min(x1, x2) < px < max(x1, x2)and y1==py:
is_in = True
break
elif min(y1, y2) <= py <= max(y1, y2): #边不是水平的
x = x1 + (py - y1) * (x2 - x1) / (y2 - y1)
if x == px: # 点是否在射线上
is_in = True
break
elif x > px: # 点是否在边左侧,即射线是否穿过边
is_in = not is_in
return is_in
if __name__ == '__main__':
#第一组,内
point = [3, 10/7]
poly = [[0, 0], [7, 3], [8, 8], [5, 5]]
print(is_in_poly(point, poly))
#第二组,外
point = [3, 8/7]
poly = [[0, 0], [7, 3], [8, 8], [5, 5]]
print(is_in_poly(point, poly))
#第三组,有平行边,射线与边重合,外
point = [-2, 0]
poly = [[0, 0], [7, 0], [7, 8], [5, 5]]
print(is_in_poly(point, poly))
#第四组,有平行边,射线与边重合,内
point = [2, 0]
poly = [[0, 0], [7, 0], [7, 8], [5, 5]]
print(is_in_poly(point, poly))
#第五组,在某点上
point = [7, 3]
poly = [[0, 0], [7, 3], [8, 8], [5, 5]]
print(is_in_poly(point, poly))
高斯滤波器
参考文章2
高斯滤波器为线性平滑滤波器,通常假定图像包含高斯白噪声,可以通过高斯滤波来抑制噪声。
二维高斯分布公式:
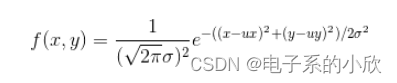
其中的ux和uy是中心点坐标。
3x3滤波核的生成:
- 先得到相对于中心点的坐标模板。
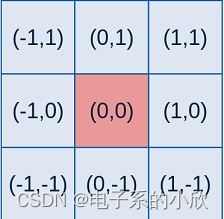
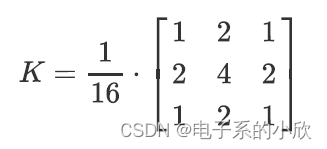
- 根据公式和坐标模板得到滤波核的每个位置的值。当标准差
σ
\sigma
σ为1.3时,得到的整数形式的滤波核为:
代码:
import cv2
import numpy as np
# Gaussian filter
def gaussian_filter(img, K_size=3, sigma=1.3):
if len(img.shape) == 3:
H, W, C = img.shape
else:
img = np.expand_dims(img, axis=-1)
H, W, C = img.shape
## Zero padding
pad = K_size // 2
out = np.zeros((H + pad * 2, W + pad * 2, C), dtype=np.float)
out[pad: pad + H, pad: pad + W] = img.copy().astype(np.float)
## prepare Kernel
K = np.zeros((K_size, K_size), dtype=np.float)
for x in range(-pad, -pad + K_size):
for y in range(-pad, -pad + K_size):
K[y + pad, x + pad] = np.exp( -(x ** 2 + y ** 2) / (2 * (sigma ** 2)))
K /= (2 * np.pi * sigma * sigma)
K /= K.sum() #归一化
print(K)
K=K[:,:,np.newaxis].repeat(C,axis=2)# 扩展维度至(K_size,K_size,C)
print(K[:,:,0])
print(K[:,:,1])
tmp = out.copy()
# filtering
for y in range(H):
for x in range(W):
# for c in range(C):
out[pad + y, pad + x, :] = np.sum(np.sum(K * tmp[y: y + K_size, x: x + K_size, :],axis=0),axis=0)
out = np.clip(out, 0, 255)
out = out[pad: pad + H, pad: pad + W].astype(np.uint8)
return out
# Read image
img = cv2.imread("./lena.png")
# Gaussian Filter
out = gaussian_filter(img, K_size=3, sigma=1.3)
# Save result
cv2.imwrite("out.jpg", out)
cv2.imshow("result", out)
cv2.imshow("origin", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
结果:
文章来源:https://blog.csdn.net/weixin_45034895/article/details/135168772
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!