PID控制器的原理,设计与整定
本文介绍PID控制器的原理,设计与整定。
1.基本概念
PID控制器是在自动控制场合中常见的控制器,因其设计简单且能达到比较好的控制结果而广泛被采用。
1)适用范围
PID控制器仅适用于线性系统。特别注意,某些非线性系统在较小的输入范围可以近似为线性系统。
2)工作原理
一个典型的PID控制系统包括控制器,执行机构,被控对象,测量元件等,为了方便理解PID控制器原理,下图是一个简化后的PID控制系统框图。

图中的比例,积分,微分3个环节最终相加就是我们的PID控制器,其输入为偏差(e(t)),输出为控制信号(u(t))。
PID控制器输入:

其中,
e(t):偏差
r(t):设定值
y(t):输出值
PID控制器计算公式:

其中:
Kp:控制器比例系数
Ti:积分时间
Td:微分时间
3)离散化
为了便于计算机控制,必须对上述PID控制器时域模型进行离散化。可作如下近似变换:
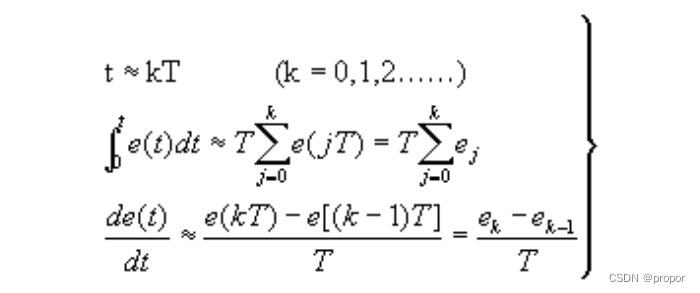
带入上述PID控制器计算公式,可得(这里为了方便用ek代表e(kT)):

或

其中:
k:采样序号,0,1,2,...
uk:k次控制输出
ek:k次输入偏差
ek-1:(k-1)次输入偏差
Ki:积分系数,Ki=Kp*T/Ti
Kd:微分系数,Kd=Kp*Td/T
T:采样周期,即PID控制器计算周期
上述公式也称位置式PID控制器。
当然也有其他方法,比如对上述PID控制器时域模型进行拉普拉斯变换,再使用公式进行s域到z域的变换,最后由z域到离散域的变换,也可以得到同样的结果(递推表达式)。
上述得出的离散域PID控制器为全量输出,对于有些具有记忆器件(如步进电机),可以采用增量输出,,可得:
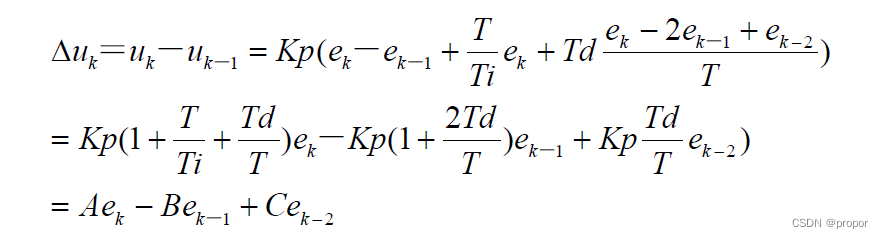
其中,
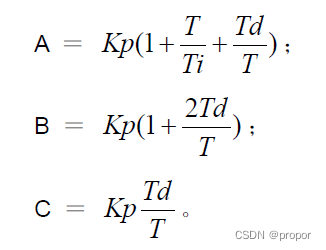
上述公式也称增量式PID控制器。
增量式PID控制器可以转化为位置式PID控制器,转换方式如下:

注意事项:
a)采样周期T非常重要,要保证T小于被控对象的响应时间,并且采样周期要恒定(不能出现较大的偏差),否则系统可能振荡或控制性能差。
b)有必要对输出值uk进行限幅处理。
c)增量式PID控制器计算量较小,优先选用。
4)各环节作用
a)比例部分
比例环节的作用是对偏差瞬间做出反应。偏差一旦产生控制器立即产生控制作用,使控制量向减少偏差的方向变化。比例系数越大,控制作用越强,过渡过程越快,静态偏差也越小,比例系数越大,也越容易产生振荡,影响系统的稳定性。
b)积分部分
积分环节只要存在偏差,它的控制作用就不断增加,只有偏差为0时,积分部分才为0,因此,积分环节作用就是消除系统静态偏差。增大积分常数Ti(减小积分常数)会减慢静态误差的消除过程,但可以减少超调,提高系统稳定性,减小积分常数Ti(增大积分常数),系统可能振荡,但消除偏差的时间也较短。
c)微分部分
实际的控制系统除了希望消除静态误差外,还要求提高系统的动态性能,即加快调节过程。在偏差出现的瞬间,或在偏差变化的瞬间, 不但要对偏差量做出立即响应(比例环节的作用),而且要根据偏差的变化趋势预先给出适当的纠正,微分环节就是实现这一作用。其主要作用为阻止偏差的变化(只要有偏差变化,就会有输出),微分部分的引入有助于减小超调量,克服振荡,使系统趋于稳定,它加快了系统的跟踪速度。但微分环节对输入信号的噪声很敏感,对那些噪声较大的系统一般不用微分或在微分起作用前对输入信号进行滤波。
2.设计
PID控制器的设计比较简单,直接套用公式即可,这里就不详细介绍了,在使用过程中将其放入一个固定采样周期T的定时器中断服务程序(或定时任务)即可。
3.整定
关于PID控制器的整定,这里介绍临界比例度法,配合Z-N经验公式进行调节。
在闭环控制系统里,将调节器置于纯比例作用下,从小到大逐渐改变调节器的比例系数,得到等幅振荡的过渡过程。此时的比例系数称为临界比例系数Ku,相邻两个波峰间的时间间隔,称为临界振荡周期Tu。
临界比例度法步骤:
1)将调节器的积分时间Ti置于最大(Ti=∞),微分时间置零(Td=0),比例系数Kp适当,平衡操作一段时间,把系统投入自动运行。
2)将比例系数Kp逐渐增大,得到等幅振荡(一定要是)过程, 记下临界比例系数 Ku和临界振荡周期Tu值。
3)根据Ku和Tu值,采用经验公式,计算出调节器各个参数,即Kp ,Ti和Td的值。
4)将Kp,Ti和Td的值,采样周期T(事先设定好),代入上述PID控制器公式计算其相应的系数即可。
按“先P再I最后D”的操作程序将调节器整定参数调到计算值上。若还不够满意,可再作进一
步调整。
Z-N经验公式,如下表所示。

临界比例度法整定注意事项:
1)有的过程控制系统,临界比例系数很大,使系统接近两式控制,调节阀不是全关就是全开,对
工业生产不利。
2)有的过程控制系统, 当调节器比例系数Kp调到最大刻度值时,系统仍不产生等幅振荡,对此,
就把最大刻度的比例度作为临界比例度Ku进行调节器参数整定。
?
总结,本文介绍了PID控制器的原理,设计与整定。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Java 并发性和多线程2
- 一篇文章讲清楚Java并发理论基础
- djangoee家教管理系统(程序+开题报告)
- Mac解决node-sass: Command failed 问题
- Kali Linux搭建DVWA漏洞靶场(保姆式教学)
- 《剑指 Offer》专项突破版 - 面试题 2 : 二进制加法(C++实现)
- 数据治理能解决AI疲劳问题吗?
- 第二章 变量与基本类型(上)
- Linux第7步_设置虚拟机的电源
- 【webpack学习】webpack插件之“html-webpack-plugin”