自动驾驶学习笔记(二十四)——车辆控制开发
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《Apollo开放平台9.0专项技术公开课》免费报名—>传送门
文章目录
前言
????????见《自动驾驶学习笔记(十九)——Planning模块》
????????见《自动驾驶学习笔记(二十)——Planning算法》??
????????见《自动驾驶学习笔记(二十一)——自动泊车系统》
????????见《自动驾驶学习笔记(二十二)——自动泊车算法》
????????见《自动驾驶学习笔记(二十三)——车辆控制模型》
????????自动驾驶中的控制模块,通过操作车上的油门、刹车和方向盘,让车辆达到目标的速度、航向和位置。主要包括横纵向控制、动力学标定表和CAN总线协议等若干部分,示例如下:

控制算法
????????横纵向控制的总体流程,示例如下:
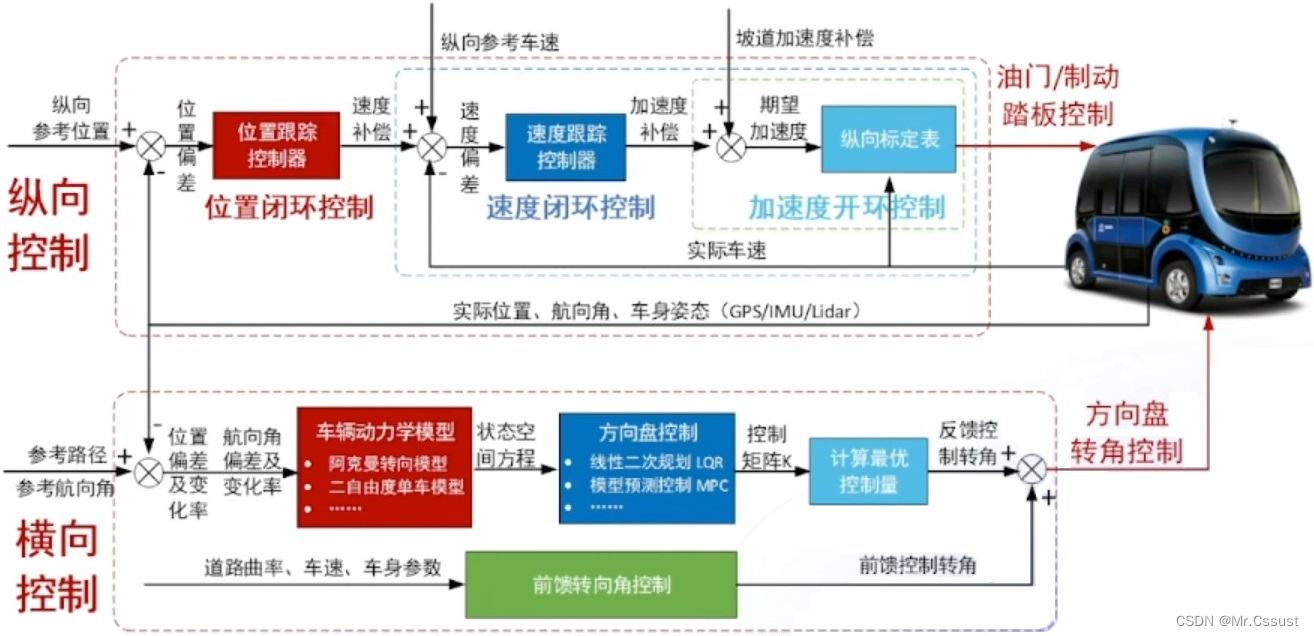
????????横纵向控制常用的算法有如下三种,示例如下:

????????上述算法的具体介绍参见见《自动驾驶学习笔记(九)——车辆控制》
控制标定
????????如果被控车辆的底盘含有ADAS控制器(统管油门和刹车踏板),它只要获得一个加速度指令即可。如果车上没有ADAS控制器,就要把加速度进一步换算成油门和制动踏板的行程,该计算过程需要用到一个动力学标定表。
????????动力学标定表一般通过车辆云标定来获取,是通过采集车辆底盘油门踏板量刹车踏板量、车辆速度、加速度作为车辆纵向动力模型的输入,通过机器学习的方式,生成相应车辆的踏板标定表生成的标定表数据量大,精度高,能提高车辆的控制精度。开发好的油门标定表和制定标定表,示例如下:
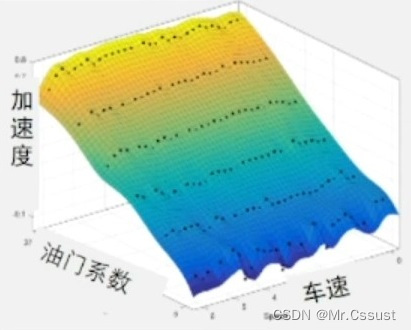

??????? 上述动力学标定表通过一个查表函数的调用:
????????Throttle_cmd or Brake_cmd = f(vx ,ax );
控制协议
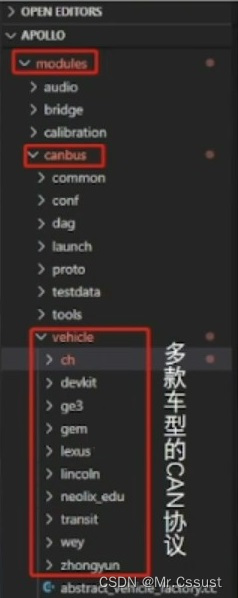
????????CANBus是车辆底盘和自动驾驶软件之间的桥梁,主要作用是反馈车当前的状态(航向,角度,速度等信息)至Apollo的上层软件模块,并且发送控制命令到车线控底盘。Apollo中集成了多款车的CAN总线协议,示例如下:
控制代码
????????Apollo中控制模块代码的执行流程,示例如下:

控制调试
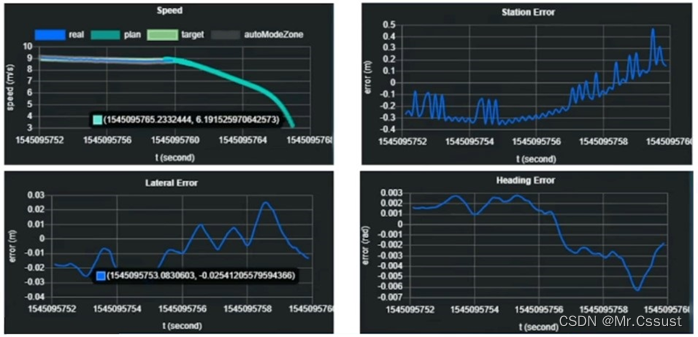
??????? 控制模块的开发高度依赖于车辆底盘的具体参数,DreamView的SimContrl功能中暂时还没有集成,所以只能基于实车进行调试验证。但是Apollo提供了远程实时访问的功能,同时也提供了播包的功能,都可以通过DreamView的PnC Monitor功能进行信号分析,示例如下:
控制评价
????????控制模块的开发的好与不好,可以通过这些指标进行评价:精确性(Steady State Error)、稳定性(Stability, Overshoot)、快速性(Rise time, Peak time)、鲁棒性(Robust)、成本,能耗,时延等等。
总结
????????以上就是本人在学习自动驾驶时,对所学课程的一些梳理和总结。后续还会分享另更多自动驾驶相关知识,欢迎评论区留言、点赞、收藏和关注,这些鼓励和支持都将成文本人持续分享的动力。
????????另外,如果有同在小伙伴,也正在学习或打算学习自动驾驶时,可以和我一同抱团学习,交流技术。
????????版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!
????????文中部分图片来源自网络,若有侵权,联系立删。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!