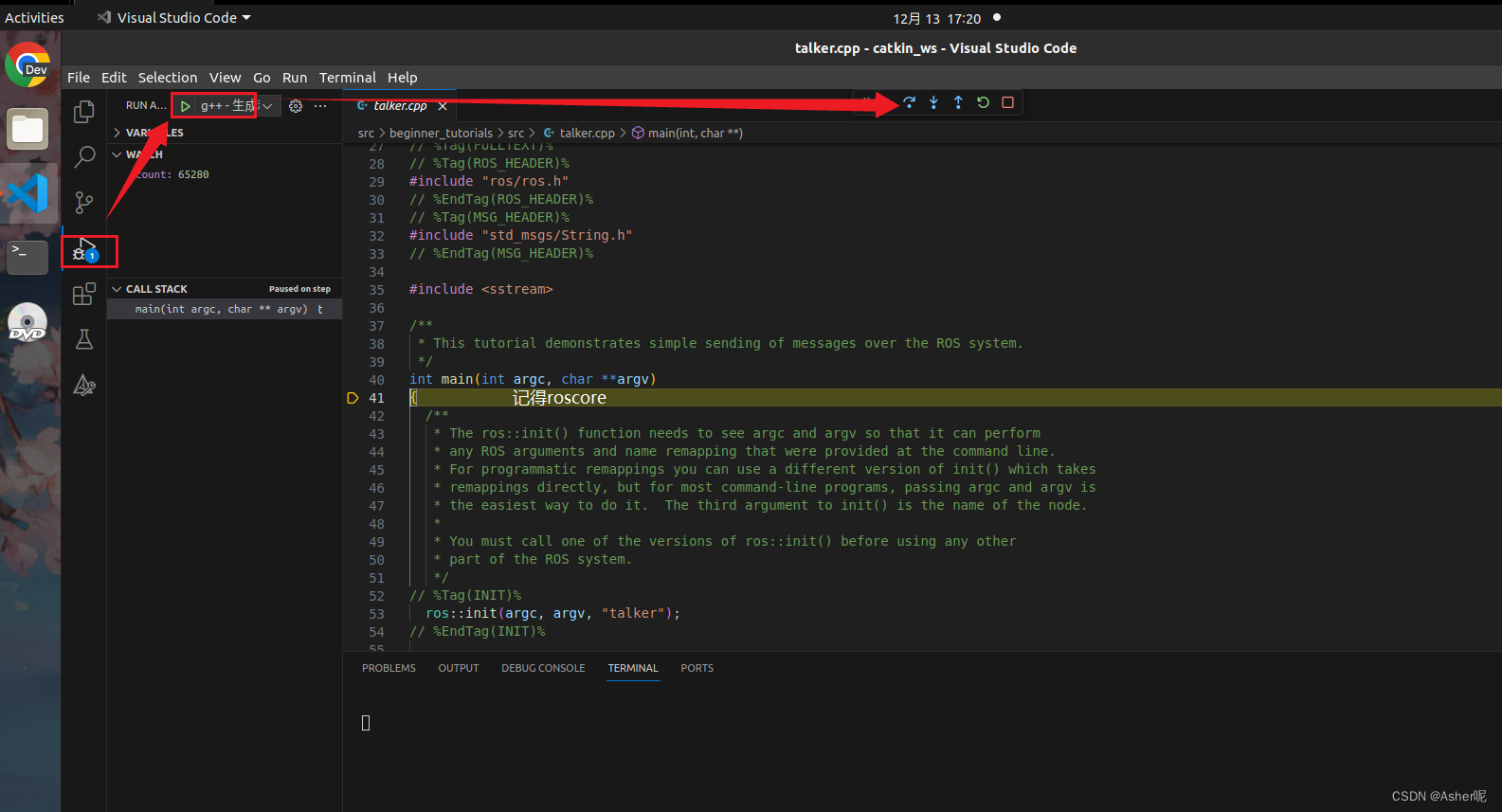
linux下配置vscode中的ros的c++调试
发布时间:2023年12月17日
第一步
这块是launch.json
{
"version": "0.2.0",
"configurations": [
{
"name": "g++ - 生成和调试活动文件",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/devel/lib/beginner_tutorials/talker",//要调试的可执行文件,你调试那个文件记得把talker改为相应的cpp文件名字,beginner_tutorials为功能包
"args": [],
"stopAtEntry": true,//设为true则调试运行时会先停在程序开始
"cwd": "${workspaceFolder}",
"environment": [],
"externalConsole": false,
"MIMode": "gdb",
"setupCommands": [
{
"description": "为 gdb 启用整齐打印",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
],
"preLaunchTask": "builtCpp",//要与tasks.json中label的值保持一致
"miDebuggerPath": "/usr/bin/gdb"
}
]
}
这一块是settings.json
{
"python.autoComplete.extraPaths": [
"/home/edu/catkin_ws/devel/lib/python3/dist-packages",
"/opt/ros/noetic/lib/python3/dist-packages"
],
"python.analysis.extraPaths": [
"/home/edu/catkin_ws/devel/lib/python3/dist-packages",
"/opt/ros/noetic/lib/python3/dist-packages"
],
"cmake.sourceDirectory": "/home/edu/catkin_ws/src/beginner_tutorials",
"files.associations": {
"*.urdf": "xml",
"*.urdf.xacro": "xml",
"cstdlib": "cpp"
}
}
这里是task.json
{
"version": "2.0.0",
"tasks": [
{
"type": "shell",
"label": "builtCpp",
"command": "catkin_make -DCMAKE_BUILD_TYPE=Debug",
"args": [],
"options": {
"cwd": "${workspaceFolder}"
},
"problemMatcher": [
"$gcc"
],
"group": "build"
},
]
}
文章来源:https://blog.csdn.net/m0_58451019/article/details/134977197
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!