如何计算CAN通信波特率
目录
在CAN总线系统中,波特率的计算是一个关键步骤,它确保网络上的所有设备能够以相同的速率进行通信。
1、理论
波特率的计算涉及到几个关键参数,包括CAN控制器的时钟频率、分频因子、以及位时间的不同部分。
时钟频率(Fclk)
- CAN控制器的时钟频率。这是CAN模块的输入时钟,通常来自于微控制器的主时钟。
分频因子(Prescaler)
- 用于从主时钟频率中分频得到位时间计数器的时钟频率。分频因子可以增大位时间,使得CAN总线能够在较低的波特率下工作。
位时间(Bit Time)
- 位时间由几个部分组成,总共需要满足规定的时间量子(Time Quanta,TQ)数:
- 同步段(Sync Seg):用于同步不同节点上的数据边缘,固定为1 TQ。
- 传播时间段(Prop Seg):用于补偿网络中的物理延迟,长度可以调整。
- 相位缓冲段1(Phase Seg1)和相位缓冲段2(Phase Seg2):用于对抗信号抖动和网络延迟,长度可调。
基于上述参数,CAN波特率的计算公式如下:
波特率 = Fclk / (Prescaler * Bit Time)其中,Bit Time = Sync Seg + Prop Seg + Phase Seg1 + Phase Seg2。
假设一个CAN控制器有如下参数:
- Fclk = 16 MHz
- Prescaler = 8
- Sync Seg = 1 TQ
- Prop Seg = 2 TQ
- Phase Seg1 = 3 TQ
- Phase Seg2 = 2 TQ
Bit Time = 1 + 2 + 3 + 2 = 8 TQ
则波特率为:
波特率 = 16 MHz / (8 * 8 TQ) = 16,000,000 / 64 = 250,000 bps (或250 kbps)2、实践
以AT32F413这款MCU为例,CAN波特率计算公式如下所示:
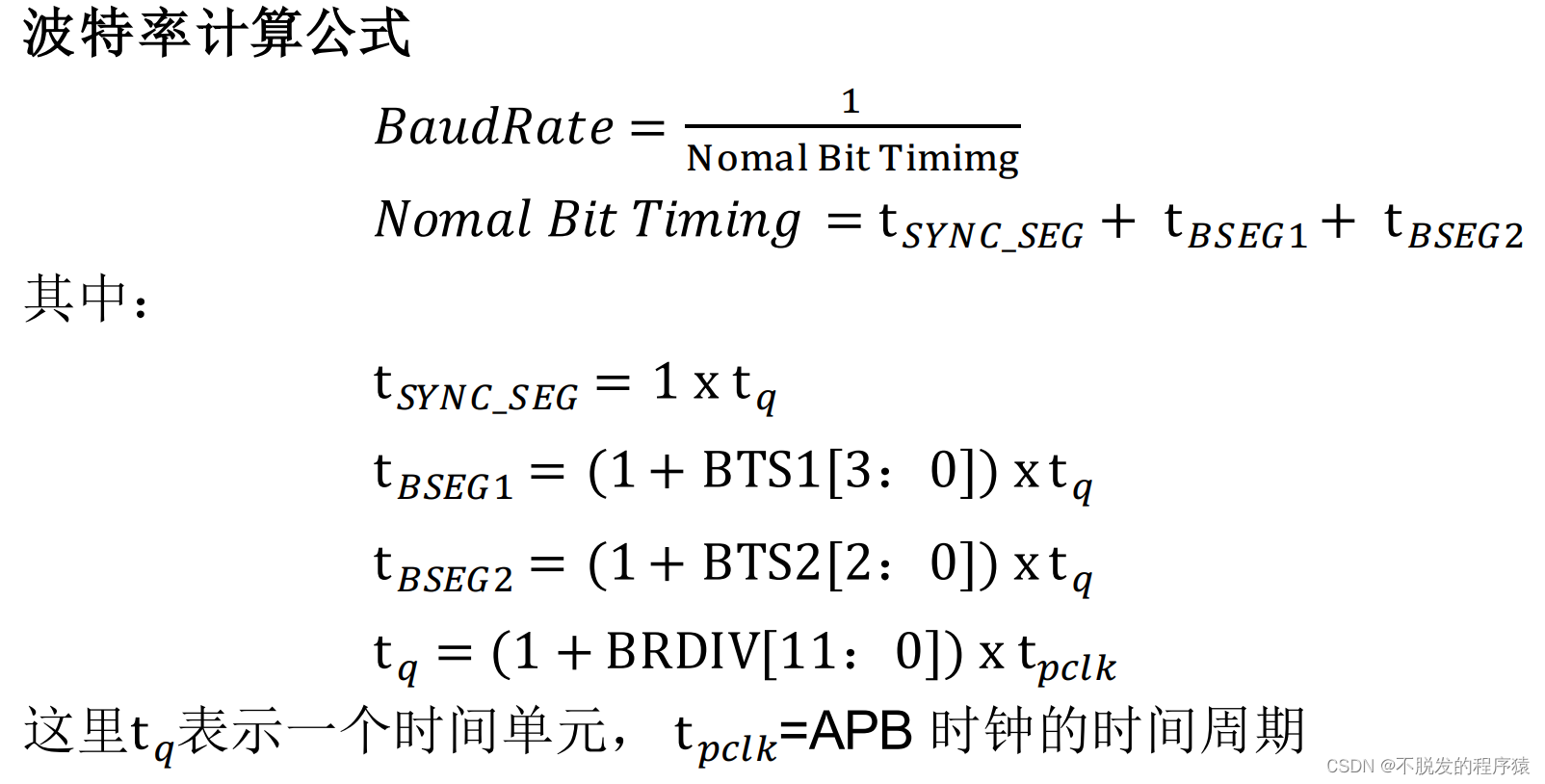
CAN 总线的额定位时间由 3 部分组成:
1、同步段(SYNC_SEG),该段占用 1 时间单元,即公式中的1 x t𝑞。
2、位段 1(BIT SEGMENT 1),包括 CAN 标准里的 PROP_SEG 和 PHASE_SEG1,记为 BSEG1, 该段占用 1 至 16 时间单元,时间单元个数由 BTS1[3: 0]位定义,即公式中的t𝐵𝑆𝐸𝐺1 = (1 + BTS1[3: 0]) x t𝑞。
3、位段 2(BIT SEGMENT 2),包括 CAN 标准里的 PHASE_SEG2,记为 BSEG2,该段占用 1 至 8 时间单元,时间单元个数由 BTS2[2: 0]位定义,即公式中的t𝐵𝑆𝐸𝐺2 = (1 + BTS2[2: 0]) x t𝑞。
时间单元的长度由 CAN 位时序寄存器(CAN_BTMG) 的 BRDIV[11: 0]位及 PCLK 定义,即公式中的t𝑞。

按照公式继续推导如下:
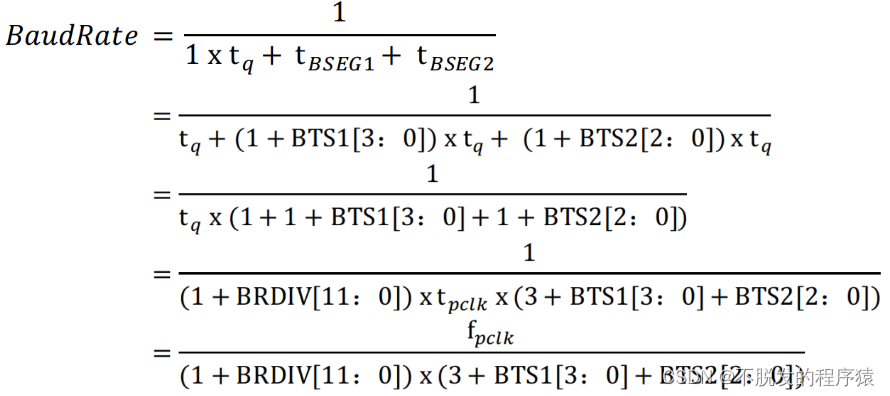
其中, BRDIV[11: 0]、 BTS1[3: 0]和 BTS2[2: 0]为 CAN 位时序寄存器 (CAN_BTMG)中参数,在 AT32F413的 BSP 程序中对应结构体对照表如下:

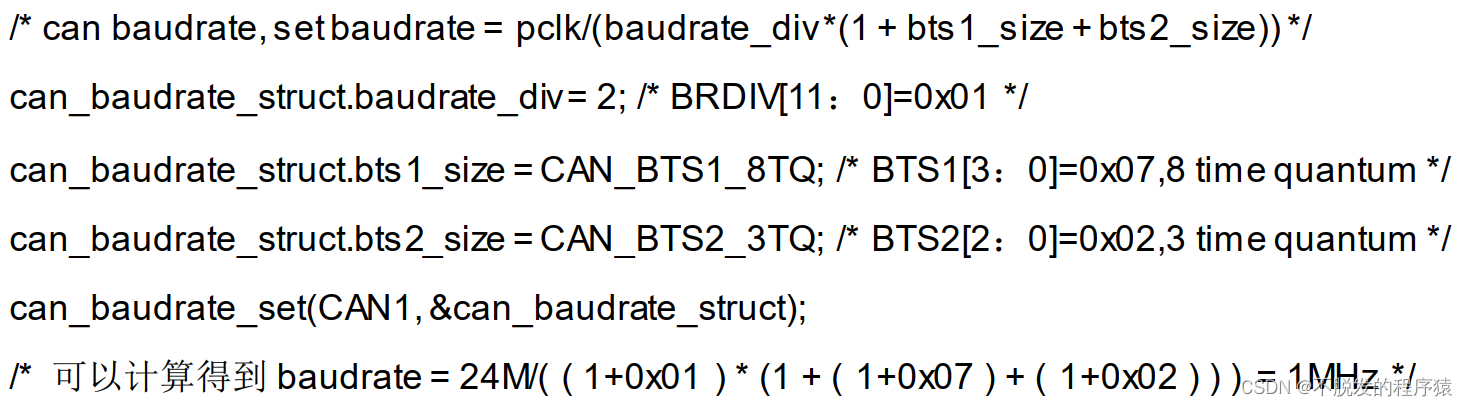
举个例子,设定f𝑆𝑌𝑆𝐶𝐿𝐾=192MHz, f𝐴𝑃𝐵1𝐶𝐿𝐾 = f𝑃𝐶𝐿𝐾=24MHz 时, 1M 波特率的软件设置如下:
3、注意事项
- 确保总的Bit Time在CAN控制器的可配置范围内。
- 不同的CAN控制器可能有不同的最大和最小TQ限制。
- 适当设置波特率可以减少误差,提高网络的稳定性和可靠性。
- 高波特率适用于短距离通信,而长距离通信则需要降低波特率以减少误差。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- virtual 安装ubuntu 和 centos
- 华为OD机试真题-中文分词模拟器-2023年OD统一考试(C卷)
- 【SpringBoot快速入门】(3)SpringBoot整合junit和MyBatis 详细代码示例与讲解
- 《深入理解计算机系统》学习笔记 - 第七课 - 机器级别的程序三
- 多协议数据库Navicat Premium中文
- 【go】Ubuntu 22.04 LTS golang go-ethereum编译安装
- 毫米波雷达4D点云生成(基于实测数据)
- 苹果CMS超级播放器专业版无授权全开源,附带安装教程
- ZZULIOJ 1104: 求因子和(函数专题)
- 系统启动流程 - 理解modules加载流程