线程死锁检测组件逻辑与源码
死锁介绍
任务的执行体之间互相持有对方所需的资源而不释放,形成了相互制约而都无法继续执行任务的情况,被称为“死锁”。
死锁案例
线程A持有锁a不释放,需要去获取锁b才能继续执行任务,
线程B持有锁b不释放,需要去获取锁c才能继续执行任务,
线程C持有锁c不释放,需要去获取锁d才能继续执行任务,
线程D持有锁d不释放,需要去获取锁a才能继续执行任务。
线程ABCD陷入了逻辑套死,形成了一个环,因此谁都无法继续执行任务。
如何判断形成死锁
判断形成死锁,只需要解决问题:即能判断线程和线程之后互相持有资源不释放,形成了一个环。
如何判断形成环
需要存储两种关系。1:锁和线程之间的关系。2、线程和线程之间的关系。
针对1,锁和线程之间的关系是多对一的,即,一个线程持有多个锁,但是一个锁最多只能能被一个线程持有。我们可以构建一个结构体数组存储这些关系,一个结构体存储着锁地址和线程id,一个结构体代表着一种关系。
针对2,线程和线程之间的关系,表示一个线程想要获取的资源,是否被另一个线程持有?如果被另一个线程持有,那么是哪个线程?需要用有向图记录,有向图有很多种记录方式,在编程中最常体现为邻接表。如图:

这个就是一个邻接表,线程tA想持有的资源在tB中,线程tB想持有的资源在tC中,以此类推,形成了一个环,也就是一个死锁。邻接表的结构是多个链表的头节点被用数组的方式串起来。
死锁检测组件编写逻辑
主要需要解决一下3块逻辑
线程获取锁
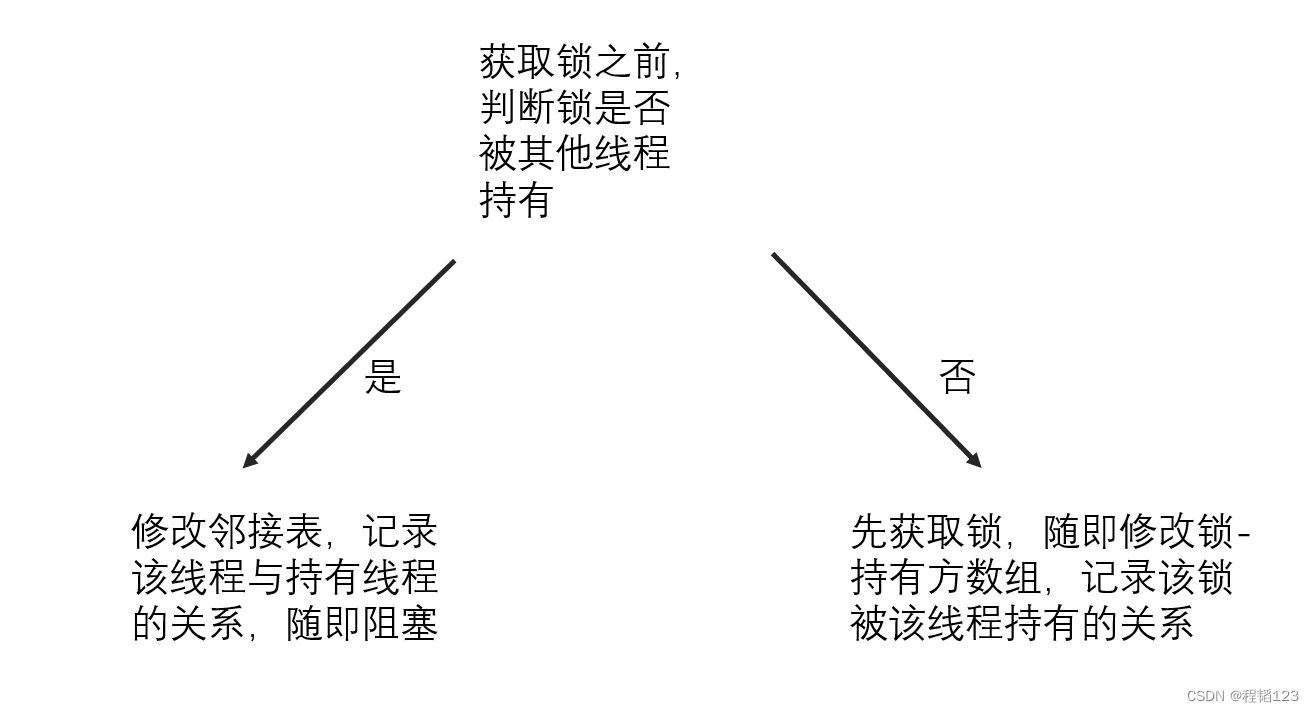
线程解锁
线程如果解锁,需要从锁-持有方数组中删除该关系。若邻接表中记录了其他线程在向该线程索取资源,那么删除也删除该关系。
监控环形成
需要另起一个线程负责监控邻接表,定期检查线程之间是否形成了死锁关系,如果形成了死锁关系,那么将这种关系输出到某处,提示程序员需要修改逻辑bug。
检测组件代码以及应用
代码比较长,了解了逻辑之后可以,可以直接在需要检测的函数的最前面调用init_hook()和start_check()这两个接口,以及提前配置好这两个接口所依赖的各层级函数、变量、定义等。
#define _GNU_SOURCE
#include <dlfcn.h>
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <unistd.h>
#include <stdint.h>
#if 1
typedef unsigned long int uint64;
#define MAX 100
enum Type {PROCESS, RESOURCE};
struct source_type {
uint64 id;
enum Type type;
uint64 lock_id;
int degress;
};
struct vertex {
struct source_type s;
struct vertex *next;
};
struct task_graph {
struct vertex list[MAX]; //邻接表头节点数组
int num;//邻接表包含的链表的数量,也就是头节点数量
struct source_type locklist[MAX]; //锁-持有方数组
int lockidx; //锁-持有关系的数量
pthread_mutex_t mutex;
};
struct task_graph *tg = NULL;
int path[MAX+1];
int visited[MAX];
int k = 0;
int deadlock = 0;
type
struct vertex *create_vertex(struct source_type type) { //其实就是把传入进来的type在堆空间复制了一份并且返回
struct vertex *tex = (struct vertex *)malloc(sizeof(struct vertex ));
tex->s = type;
tex->next = NULL;
return tex;
}
int search_vertex(struct source_type type) { //查找所需的头节点在邻接表数组中的位置
int i = 0;
for (i = 0;i < tg->num;i ++) {
if (tg->list[i].s.type == type.type && tg->list[i].s.id == type.id) {
return i;
}
}
return -1;
}
void add_vertex(struct source_type type) { //增加邻接表数组的元素,也就是又来了一个链表要记录了
if (search_vertex(type) == -1) {
tg->list[tg->num].s = type;
tg->list[tg->num].next = NULL;
tg->num ++;
}
}
int add_edge(struct source_type from, struct source_type to) { //给邻接表中某只链表增加节点,表示头节点对应的线程所需要的资源又被持有了
add_vertex(from);
add_vertex(to);
struct vertex *v = &(tg->list[search_vertex(from)]);
while (v->next != NULL) {
v = v->next;
}
v->next = create_vertex(to);
}
int verify_edge(struct source_type i, struct source_type j) { //验证头节点对应的线程是不是在重复持有某个锁
if (tg->num == 0) return 0;
int idx = search_vertex(i);
if (idx == -1) {
return 0;
}
struct vertex *v = &(tg->list[idx]);
while (v != NULL) {
if (v->s.id == j.id) return 1;
v = v->next;
}
return 0;
}
int remove_edge(struct source_type from, struct source_type to) { //移除邻接表的某个链表的节点,表示线程和线程之间的关系解除
int idxi = search_vertex(from);
int idxj = search_vertex(to);
if (idxi != -1 && idxj != -1) {
struct vertex *v = &tg->list[idxi];
struct vertex *remove;
while (v->next != NULL) {
if (v->next->s.id == to.id) {
remove = v->next;
v->next = v->next->next;
free(remove);
break;
}
v = v->next;
}
}
}
void print_deadlock(void) { //如果形成了死锁,那么打印环
int i = 0;
printf("cycle : ");
for (i = 0;i < k-1;i ++) {
printf("%ld --> ", tg->list[path[i]].s.id);
}
printf("%ld\n", tg->list[path[i]].s.id);
}
int DFS(int idx) {
struct vertex *ver = &tg->list[idx];
if (visited[idx] == 1) {
path[k++] = idx;
print_deadlock();
deadlock = 1;
return 0;
}
visited[idx] = 1;
path[k++] = idx;
while (ver->next != NULL) {
DFS(search_vertex(ver->next->s));
k --;
ver = ver->next;
}
return 1;
}
int search_for_cycle(int idx) { //查询是否形成了环
struct vertex *ver = &tg->list[idx];
visited[idx] = 1;
k = 0;
path[k++] = idx;
while (ver->next != NULL) {
int i = 0;
for (i = 0;i < tg->num;i ++) {
if (i == idx) continue;
visited[i] = 0;
}
for (i = 1;i <= MAX;i ++) {
path[i] = -1;
}
k = 1;
DFS(search_vertex(ver->next->s));
ver = ver->next;
}
}
#endif
//
#if 1
int search_lock(uint64 lock) { //
int i = 0;
for (i = 0;i < tg->lockidx;i ++) {
if (tg->locklist[i].lock_id == lock) {
return i;
}
}
return -1;
}
int search_empty_lock(uint64 lock) {
int i = 0;
for (i = 0;i < tg->lockidx;i ++) {
if (tg->locklist[i].lock_id == 0) {
return i;
}
}
return tg->lockidx;
}
void lock_before(uint64_t tid, uint64_t lockaddr) {
/*
1. if (lockaddr) {
tid --> lockaddr.tid;
}
*/
int idx = 0;
for (idx = 0;idx < tg->lockidx;idx ++) {
if (tg->locklist[idx].lock_id == lockaddr) { //
struct source_type from;
from.id = tid;
from.type = PROCESS;
add_vertex(from);
struct source_type to;
to.id = tg->locklist[idx].id;
to.type = PROCESS;
add_vertex(to);
tg->locklist[idx].degress ++;
if (!verify_edge(from, to))
add_edge(from, to);
}
}
}
void lock_after(uint64_t tid, uint64_t lockaddr) {
/*
if (!lockaddr) {
tid --> lockaddr;
} else {
lockaddr.tid = tid;
tid -> lockaddr;
}
*/
int idx = 0;
if (-1 == (idx = search_lock(lockaddr))) {//
int eidx = search_empty_lock(lockaddr);
tg->locklist[eidx].id = tid;
tg->locklist[eidx].lock_id = lockaddr;
tg->lockidx ++;
} else {
struct source_type from;
from.id = tid;
from.type = PROCESS;
add_vertex(from);
struct source_type to;
to.id = tg->locklist[idx].id;
to.type = PROCESS;
add_vertex(to);
tg->locklist[idx].degress --;
if (verify_edge(from, to))
remove_edge(from, to);
tg->locklist[idx].id = tid;
}
}
void unlock_after(uint64_t tid, uint64_t lockaddr) {
// lockaddr.tid = 0;
int idx = search_lock(lockaddr);
if (tg->locklist[idx].degress == 0) {
tg->locklist[idx].id = 0;
tg->locklist[idx].lock_id = 0;
}
}
void check_dead_lock(void) {
int i = 0;
deadlock = 0;
for (i = 0;i < tg->num;i ++) {
if (deadlock == 1) break;
search_for_cycle(i);
}
if (deadlock == 0) {
printf("no deadlock\n");
}
}
static void *thread_routine(void *args) {
while (1) {
sleep(5);
check_dead_lock();
}
}
void start_check(void) {
tg = (struct task_graph*)malloc(sizeof(struct task_graph));
tg->num = 0;
tg->lockidx = 0;
pthread_t tid;
pthread_create(&tid, NULL, thread_routine, NULL);
}
// hook
// define
typedef int (*pthread_mutex_lock_t)(pthread_mutex_t *mutex);
pthread_mutex_lock_t pthread_mutex_lock_f = NULL;
typedef int (*pthread_mutex_unlock_t)(pthread_mutex_t *mutex);
pthread_mutex_unlock_t pthread_mutex_unlock_f = NULL;
// implement
int pthread_mutex_lock(pthread_mutex_t *mutex) {
pthread_t selfid = pthread_self();
lock_before((uint64_t)selfid, (uint64_t)mutex);
pthread_mutex_lock_f(mutex);
lock_after((uint64_t)selfid, (uint64_t)mutex);
}
int pthread_mutex_unlock(pthread_mutex_t *mutex) {
pthread_mutex_unlock_f(mutex);
pthread_t selfid = pthread_self();
unlock_after((uint64_t)selfid, (uint64_t)mutex);
}
// init
void init_hook(void) {
if (!pthread_mutex_lock_f)
pthread_mutex_lock_f = dlsym(RTLD_NEXT, "pthread_mutex_lock");
if (!pthread_mutex_unlock_f)
pthread_mutex_unlock_f = dlsym(RTLD_NEXT, "pthread_mutex_unlock");
}
#endif
//
#if 1 //sample
pthread_mutex_t r1 = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t r2 = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t r3 = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t r4 = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t r5 = PTHREAD_MUTEX_INITIALIZER;
void *t1_cb(void *arg) {
printf("t1: %ld\n", pthread_self());
pthread_mutex_lock(&r1);
sleep(1);
pthread_mutex_lock(&r2);
pthread_mutex_unlock(&r2);
pthread_mutex_unlock(&r1);
}
void *t2_cb(void *arg) {
printf("t2: %ld\n", pthread_self());
pthread_mutex_lock(&r2);
sleep(1);
pthread_mutex_lock(&r3);
pthread_mutex_unlock(&r3);
pthread_mutex_unlock(&r2);
}
void *t3_cb(void *arg) {
printf("t3: %ld\n", pthread_self());
pthread_mutex_lock(&r3);
sleep(1);
pthread_mutex_lock(&r4);
pthread_mutex_unlock(&r4);
pthread_mutex_unlock(&r3);
}
void *t4_cb(void *arg) {
printf("t4: %ld\n", pthread_self());
pthread_mutex_lock(&r4);
sleep(1);
pthread_mutex_lock(&r5);
pthread_mutex_unlock(&r5);
pthread_mutex_unlock(&r4);
}
void *t5_cb(void *arg) {
printf("t5: %ld\n", pthread_self());
pthread_mutex_lock(&r1);
sleep(1);
pthread_mutex_lock(&r5);
pthread_mutex_unlock(&r5);
pthread_mutex_unlock(&r1);
}
// deadlock
//
int main() {
init_hook(); //重载lock与unlock函数,保留原有功能的基础上增加lock_before.lock_after,unlock_after操作
start_check(); //另起一个线程定期检查是否形成死锁
//形成了死锁
pthread_t t1, t2, t3, t4, t5;
pthread_create(&t1, NULL, t1_cb, NULL);
pthread_create(&t2, NULL, t2_cb, NULL);
pthread_create(&t3, NULL, t3_cb, NULL);
pthread_create(&t4, NULL, t4_cb, NULL);
pthread_create(&t5, NULL, t5_cb, NULL);
pthread_join(t1, NULL);
pthread_join(t2, NULL);
pthread_join(t3, NULL);
pthread_join(t4, NULL);
pthread_join(t5, NULL);
printf("complete\n");
}
#endif本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!