超维空间S2无人机使用说明书——61、ROS无人机4G远程控制
发布时间:2024年01月13日
4G模块使用说明
引言:为了实现对无人机的远程控制,我们采用了4G通信的方案,该方案需要硬件以及相关软件的支持。4G通信是可选择功能,请确认无人机型号是否选配了4G通信。
一、4G通信方案
我们的4G通信主要通过两种方式实现,一种是使用终端模拟器,比如Xshell、putty,另一种是使用远程软件,如nomachine。具体使用教程如下:机载电脑的相关环境已经配置完成,直接使用即可。
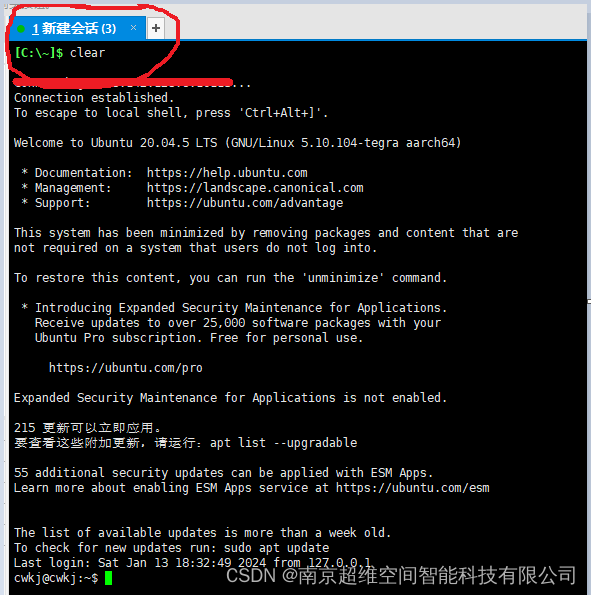
二、检查指示灯是否正常
出现两个蓝色灯,一个慢闪,表明当前网络状况正常,可以直接使用

三、方案一、使用终端模拟软件进行远程连接
1、打开Xshell软件,填写对应的IP地址和端口号(putty软件同理使用)

2、打开后如下:
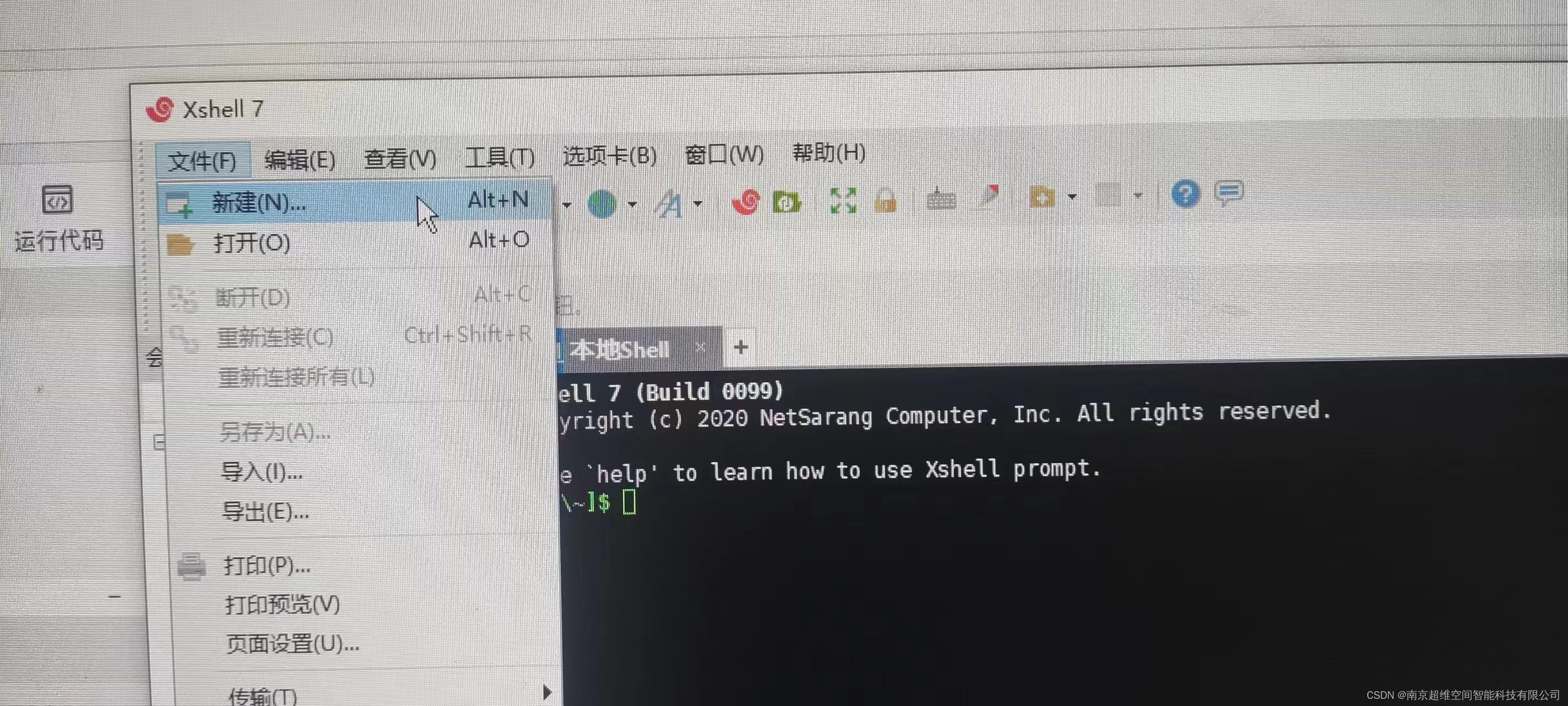
3、选择新建会话
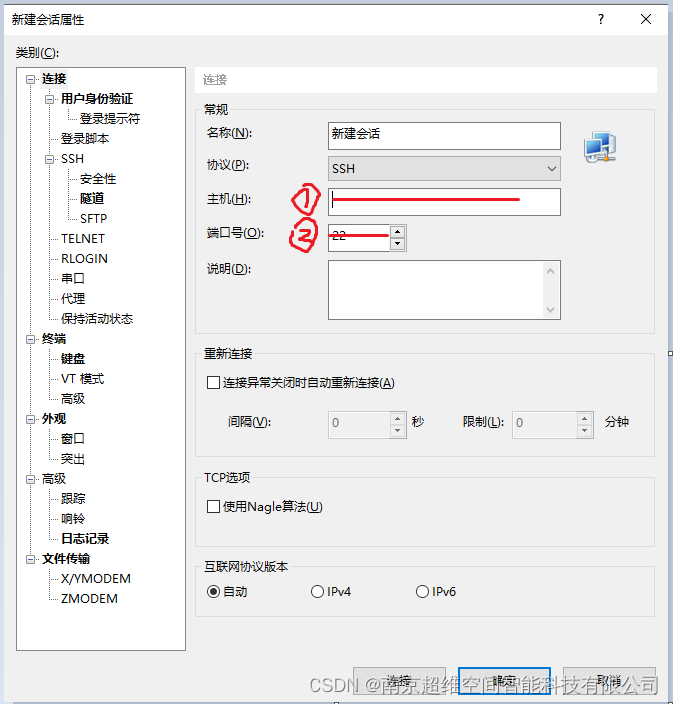
4、填写对应的IP和端口号
IP和端口号问客服索要,私密账号,此处不添加演示
5、按照提示输入机载电脑用户名和密码即可
用户名:cwkj
密码:111
6、判断是否连接上
(1)、未连接远程,左上角红色或者灰色
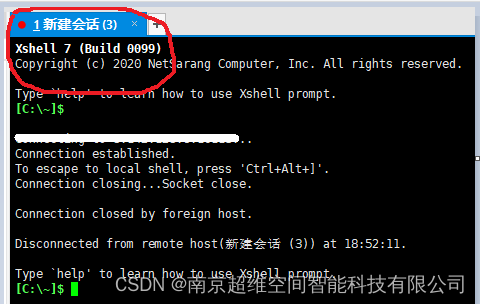
(2)、已经连接远程,左上角显示绿色
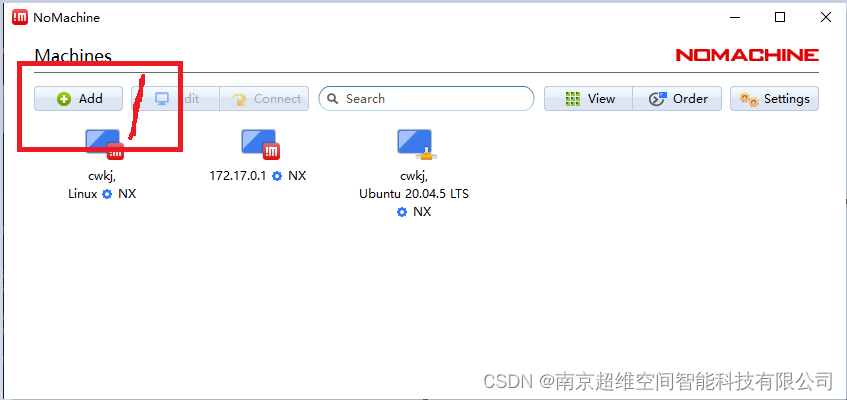
四、方案二、使用可视化远程软件进行远程连接
1、打开nomachine软件(其他软件同理使用)

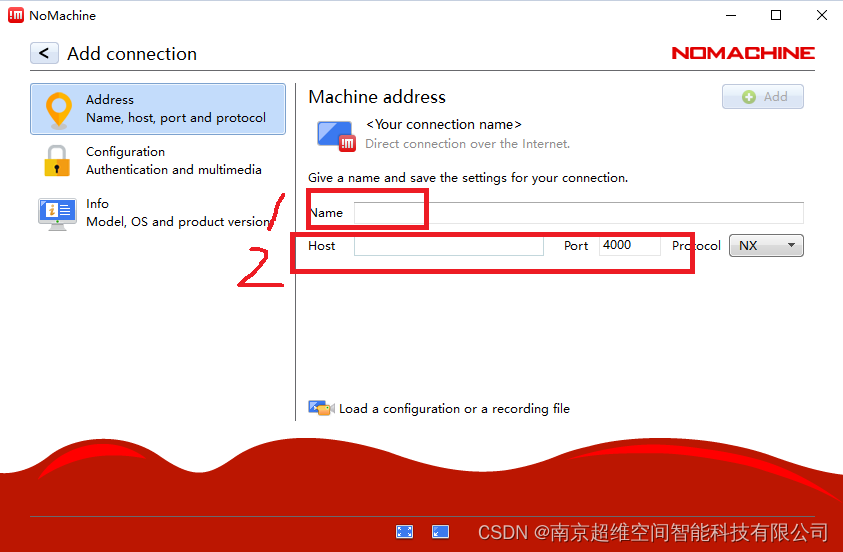
2、打开后点击左上角add添加ip和端口号
3、在下图红框分别写用户名和IP以及对应的端口号,然后Enter确认
4、回到主界面,然后Enter确认即可看到机载电脑端的左面了
文章来源:https://blog.csdn.net/qq_35598561/article/details/135574304
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- C++入门【32-C++ 数据结构】
- 抓包工具-Charles使用
- 网络安全进阶试题——附答案
- uniapp中组件库的Textarea 文本域的丰富使用方法
- Conda python管理环境environments 三 从入门到精通
- Python工具箱系列
- 数据结构和算法-数据结构的基本概念和三要素和数据类型和抽象数据类型
- 医院体检中心客户满意度抽样方法
- 智慧工厂视频监控平台EasyCVR公网收流后内网设备无法播放是什么原因?
- 【c++知识】vector基本操作