单点定位算法流程和编程实践
1?单点定位整体框架、输入输出、配置、卫星位置计算
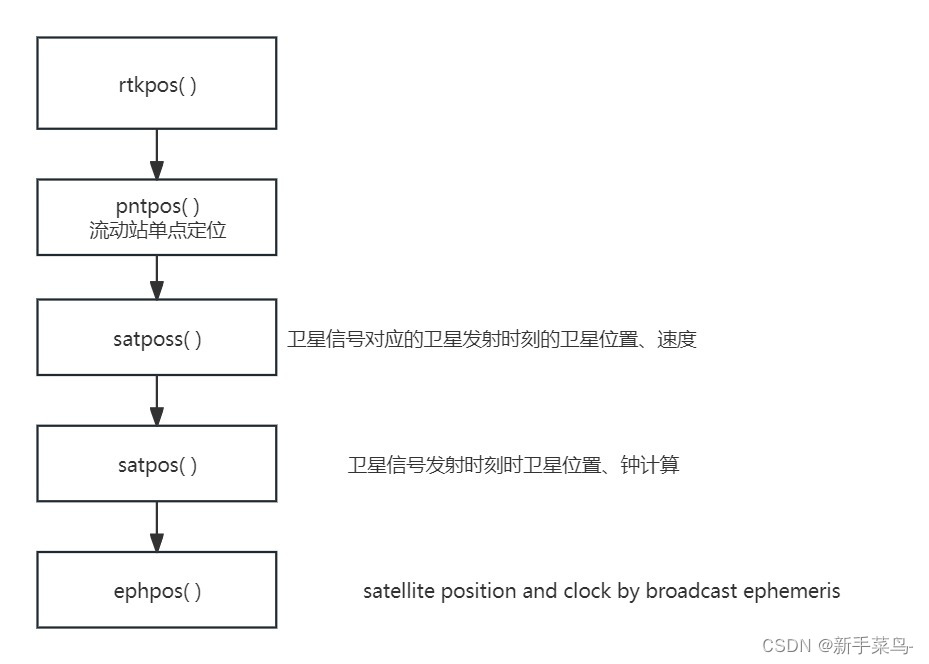
1.1 rtkpos( )函数
功能:处理单历元的所有卫星观测值数据(流动站+基准站)
参数:
[1] rtk_t *rtk
[2] const obsd_t *obs?每个历元所有的观测值
[3] int n? 卫星数量。也是结构体数组obs下标大小
[4] const nav_t *nav? 星历
首先备份配置参数,因为后面使用时会改。之后统计基准站和流动站个数,记录上一历元的时间,进行流动站单点定位pntpos(),然后计算两历元的时差。最后选择不同的定位模式进行解算、输出
extern int rtkpos(rtk_t *rtk, const obsd_t *obs, int n, const nav_t *nav)
{
prcopt_t *opt=&rtk->opt; //先复制一份配置,因为后面要改
sol_t solb={{0}};
gtime_t time;
int i,nu,nr;
char msg[128]="";
trace(3,"rtkpos : time=%s n=%d\n",time_str(obs[0].time,3),n);
trace(4,"obs=\n"); traceobs(4,obs,n);
/*trace(5,"nav=\n"); tracenav(5,nav);*/
/* set base staion position */
if (opt->refpos<=3&&opt->mode!=PMODE_SINGLE&&opt->mode!=PMODE_MOVEB) {
for (i=0;i<6;i++) rtk->rb[i]=i<3?opt->rb[i]:0.0;
}
/* count rover/base station observations */
for (nu=0;nu <n&&obs[nu ].rcv==1;nu++) ; //流动站个数统计
for (nr=0;nu+nr<n&&obs[nu+nr].rcv==2;nr++) ; //基准站个数统计
time=rtk->sol.time; /* previous epoch */ //上一历元的时间,时间的获取是在ontpos()这个函数里
/* rover position by single point positioning 流动站单点定位 */
if (!pntpos(obs,nu,nav,&rtk->opt,&rtk->sol,NULL,rtk->ssat,msg)) {
errmsg(rtk,"point pos error (%s)\n",msg);
if (!rtk->opt.dynamics) {
outsolstat(rtk);
return 0;
}
}
//得出两个历元的时间差
//rtk->tt,time difference between current and previous
if (time.time!=0) rtk->tt=timediff(rtk->sol.time,time);
//下面是选择定位的模式
/* single point positioning 单点定位*/ //如果是单点定位,那么我们之前就解算过了,直接输出即可
if (opt->mode==PMODE_SINGLE) {
outsolstat(rtk);
return 1;
}
/* precise point positioning 精密单点定位*/
if (opt->mode>=PMODE_PPP_KINEMA) {
pppos(rtk,obs,nu,nav);
pppoutsolstat(rtk,statlevel,fp_stat);
return 1;
}
/* check number of data of base station and age of differential */
if (nr==0) {
errmsg(rtk,"no base station observation data for rtk\n");
outsolstat(rtk);
return 1;
}
if (opt->mode==PMODE_MOVEB) { /* moving baseline 基线 */
/* estimate position/velocity of base station */
if (!pntpos(obs+nu,nr,nav,&rtk->opt,&solb,NULL,NULL,msg)) {
errmsg(rtk,"base station position error (%s)\n",msg);
return 0;
}
rtk->sol.age=(float)timediff(rtk->sol.time,solb.time);
if (fabs(rtk->sol.age)>TTOL_MOVEB) {
errmsg(rtk,"time sync error for moving-base (age=%.1f)\n",rtk->sol.age);
return 0;
}
for (i=0;i<6;i++) rtk->rb[i]=solb.rr[i];
/* time-synchronized position of base station */
for (i=0;i<3;i++) rtk->rb[i]+=rtk->rb[i+3]*rtk->sol.age;
}
else {
rtk->sol.age=(float)timediff(obs[0].time,obs[nu].time);
if (fabs(rtk->sol.age)>opt->maxtdiff) {
errmsg(rtk,"age of differential error (age=%.1f)\n",rtk->sol.age);
outsolstat(rtk);
return 1;
}
}
/* relative potitioning */
relpos(rtk,obs,nu,nr,nav);
outsolstat(rtk);
return 1;
}
1.2?pntpos( )函数
解算接收机(流动站接收机)位置、速度、钟差
* args ? : obsd_t *obs ? ? ?I ? observation data 观测值
* ? ? ? ? ?int ? ?n ? ? ? ? I ? number of observation data 卫星数
* ? ? ? ? ?nav_t ?*nav ? ? ?I ? navigation data 星历
* ? ? ? ? ?prcopt_t *opt ? ?I ? processing options 配置参数
* ? ? ? ? ?sol_t ?*sol ? ? ?IO ?solution
* ? ? ? ? ?double *azel ? ? IO ?azimuth/elevation angle (rad) (NULL: no output) 方位角/高度角
* ? ? ? ? ?ssat_t *ssat ? ? IO ?satellite status ? ? ? ? ? ? ?(NULL: no output) 卫星状态
* ? ? ? ? ?char ? *msg ? ? ?O ? error message for error exit

extern int pntpos(const obsd_t *obs, int n, const nav_t *nav,
const prcopt_t *opt, sol_t *sol, double *azel, ssat_t *ssat,
char *msg)
{
prcopt_t opt_=*opt;
double *rs,*dts,*var,*azel_,*resp; //定义的指针,为了后面申请内存使用,二维数组。
int i,stat,vsat[MAXOBS]={0},svh[MAXOBS];
//先设置没有输出
sol->stat=SOLQ_NONE;
//判断有没有卫星,没有直接返回
if (n<=0) {strcpy(msg,"no observation data"); return 0;}
trace(3,"pntpos : tobs=%s n=%d\n",time_str(obs[0].time,3),n);
//获取该历元时间。因为都是这个历元的数据,下标无所谓
sol->time=obs[0].time; msg[0]='\0';
//申请内存,数组
//mat() malloc一段内存。每个数组含义,后面有解释
rs=mat(6,n); dts=mat(2,n); var=mat(1,n); azel_=zeros(2,n); resp=mat(1,n);
//如果不是单点定位,启用电离层模型纠正
if (opt_.mode!=PMODE_SINGLE) { /* for precise positioning */
#if 0
opt_.sateph =EPHOPT_BRDC;
#endif
opt_.ionoopt=IONOOPT_BRDC;
opt_.tropopt=TROPOPT_SAAS;
}
/* satellite positons, velocities and clocks 计算卫星位置、速度和时间*/
satposs(sol->time,obs,n,nav,opt_.sateph,rs,dts,var,svh);
/* estimate receiver position with pseudorange 评价精度*/
stat=estpos(obs,n,rs,dts,var,svh,nav,&opt_,sol,azel_,vsat,resp,msg);
/* raim fde */
if (!stat&&n>=6&&opt->posopt[4]) {
stat=raim_fde(obs,n,rs,dts,var,svh,nav,&opt_,sol,azel_,vsat,resp,msg);
}
/* estimate receiver velocity with doppler */
if (stat) estvel(obs,n,rs,dts,nav,&opt_,sol,azel_,vsat);
if (azel) {
for (i=0;i<n*2;i++) azel[i]=azel_[i];
}
//
if (ssat) {
for (i=0;i<MAXSAT;i++) {
ssat[i].vs=0;
ssat[i].azel[0]=ssat[i].azel[1]=0.0;
ssat[i].resp[0]=ssat[i].resc[0]=0.0;
ssat[i].snr[0]=0;
}
for (i=0;i<n;i++) {
ssat[obs[i].sat-1].azel[0]=azel_[ i*2];
ssat[obs[i].sat-1].azel[1]=azel_[1+i*2];
ssat[obs[i].sat-1].snr[0]=obs[i].SNR[0];
if (!vsat[i]) continue;
ssat[obs[i].sat-1].vs=1;
ssat[obs[i].sat-1].resp[0]=resp[i];
}
}
free(rs); free(dts); free(var); free(azel_); free(resp);
return stat;
}1.3 mat( )函数
malloc( )申请内存。在pntpos()函数中,申请的是m*n大小的空间,二维数组。但我们需要清除,这其实是内存的一段连续空间
rs=mat(6,n); dts=mat(2,n); var=mat(1,n); azel_=zeros(2,n); resp=mat(1,n);
?n是卫星数量。推测rs是每颗卫星包含的6种信息,dts是卫星包含的2种信息.....
rs:x、y、z、vx、vy、vz??satellite positions and velocities
dts:钟、钟piao? ?satellite clocks
var:方差,精度。?sat position and clock error variances (m^2)
azel_:高度角/方位角
resp:sat health flag (-1:correction not available)
extern double *mat(int n, int m)
{
double *p;
if (n<=0||m<=0) return NULL;
if (!(p=(double *)malloc(sizeof(double)*n*m))) {
fatalerr("matrix memory allocation error: n=%d,m=%d\n",n,m);
}
return p;
}1.4 satposs()函数
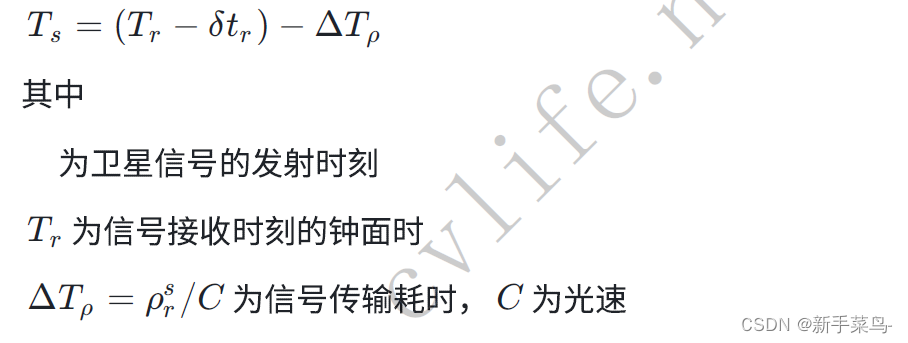
计算的是卫星信号对应的卫星发射时刻的卫星位置、速度,所以我们得先计算出卫星发射时刻是多少。因为传时间参数--teph是接收机接收时刻,我们需要使用伪距去推算卫星发射时刻。
- 卫星发射信号时刻,理论计算
[1]?卫星钟差假设没有,只考虑接收机钟差。但是(接收机钟差、真实卫地距、传播时间)我们不知道,需要把这个未知量代换
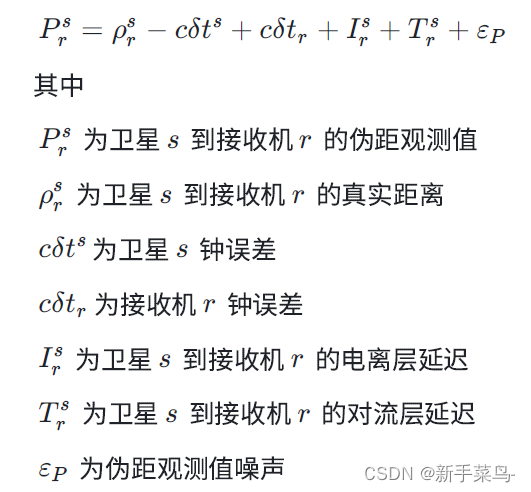
[2]?伪距观测方程
我们不考虑电离层、对流层、噪声影响。
[3]?推导,由伪距观测方方程。卫星钟差可以通过导航电文获得,伪距也有
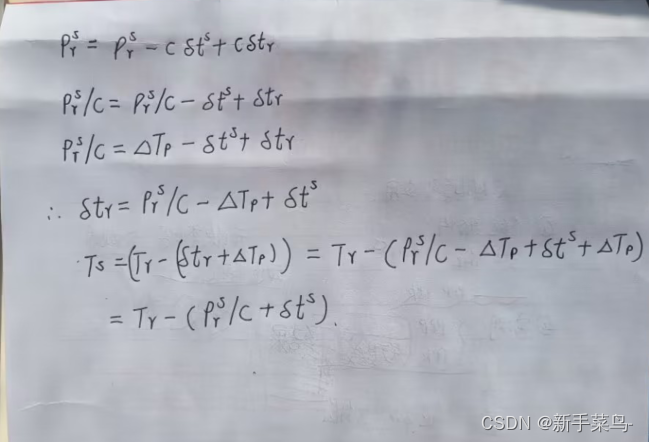
extern void satposs(gtime_t teph, const obsd_t *obs, int n, const nav_t *nav,
int ephopt, double *rs, double *dts, double *var, int *svh)
{
gtime_t time[MAXOBS]={{0}};
double dt,pr;
int i,j;
//teph是时间。每包数据都有个时间,这个时间是接收机捕获观测值时,接收机的钟面时刻
trace(3,"satposs : teph=%s n=%d ephopt=%d\n",time_str(teph,3),n,ephopt);
for (i=0;i<n&&i<MAXOBS;i++) {
for (j=0;j<6;j++) rs [j+i*6]=0.0;
for (j=0;j<2;j++) dts[j+i*2]=0.0;
var[i]=0.0; svh[i]=0;
/* search any psuedorange 伪距 */
//选择任意伪距值即可
for (j=0,pr=0.0;j<NFREQ;j++) if ((pr=obs[i].P[j])!=0.0) break;
if (j>=NFREQ) {
trace(2,"no pseudorange %s sat=%2d\n",time_str(obs[i].time,3),obs[i].sat);
continue;
}
//计算卫星发射时刻
/* transmission time by satellite clock */
time[i]=timeadd(obs[i].time,-pr/CLIGHT); //pr是伪距
/* satellite clock bias by broadcast ephemeris 通过广播星历获取卫星钟钟差*/
if (!ephclk(time[i],teph,obs[i].sat,nav,&dt)) {
trace(2,"no broadcast clock %s sat=%2d\n",time_str(time[i],3),obs[i].sat);
continue;
}
time[i]=timeadd(time[i],-dt); //至此,我们已经得出卫星发射时刻
/* satellite position and clock at transmission time 卫星信号发射时刻,卫星位置计算 */
if (!satpos(time[i],teph,obs[i].sat,ephopt,nav,rs+i*6,dts+i*2,var+i,
svh+i)) {
trace(2,"no ephemeris %s sat=%2d\n",time_str(time[i],3),obs[i].sat);
continue;
}
/* if no precise clock available, use broadcast clock instead */
if (dts[i*2]==0.0) {
if (!ephclk(time[i],teph,obs[i].sat,nav,dts+i*2)) continue;
dts[1+i*2]=0.0;
*var=SQR(STD_BRDCCLK);
}
}
for (i=0;i<n&&i<MAXOBS;i++) {
trace(4,"%s sat=%2d rs=%13.3f %13.3f %13.3f dts=%12.3f var=%7.3f svh=%02X\n",
time_str(time[i],6),obs[i].sat,rs[i*6],rs[1+i*6],rs[2+i*6],
dts[i*2]*1E9,var[i],svh[i]);
}
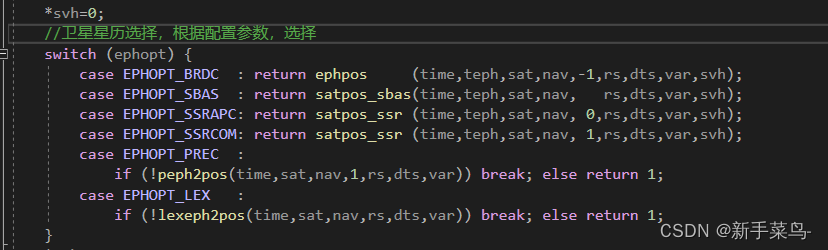
}1.5 satpos()
卫星位置和钟解算。我们只针对广播星历进行介绍,ephpos()

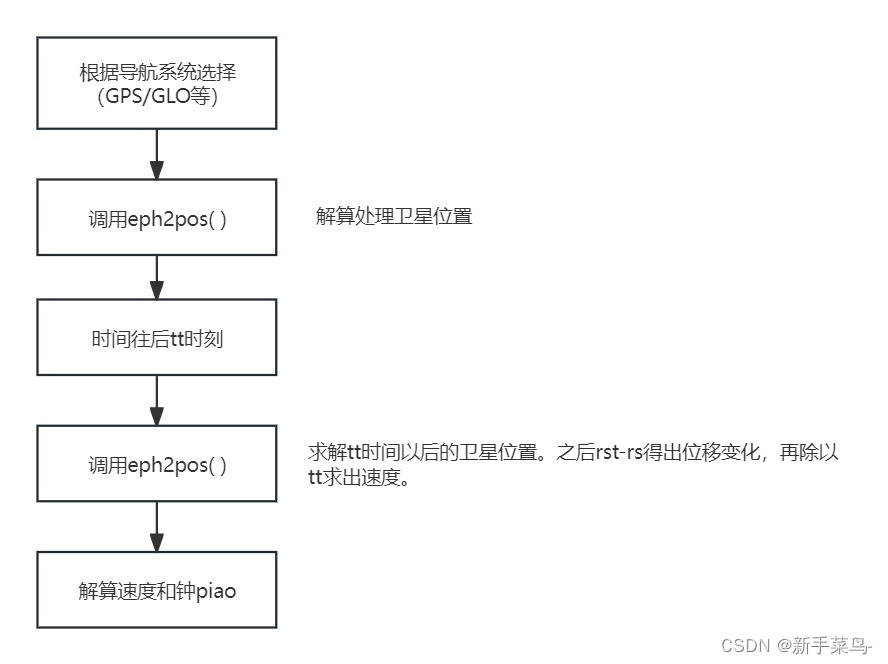
1.6?ephpos()
两次调用eph2pos(),计算卫星位置。第一次调用是卫星信号发射时刻的卫星位置,第二次调用是间隔tt事件后的位置。位移差,除以tt就得出速度
eph2pos()是一个接口,broadcast ephemeris to satellite position and clock bias。由广播星历得出卫星位置和钟差
static int ephpos(gtime_t time, gtime_t teph, int sat, const nav_t *nav,
int iode, double *rs, double *dts, double *var, int *svh)
{
eph_t *eph;
geph_t *geph;
seph_t *seph;
double rst[3],dtst[1],tt=1E-3;
int i,sys;
trace(4,"ephpos : time=%s sat=%2d iode=%d\n",time_str(time,3),sat,iode);
sys=satsys(sat,NULL);
*svh=-1;
if (sys==SYS_GPS||sys==SYS_GAL||sys==SYS_QZS||sys==SYS_CMP) {
if (!(eph=seleph(teph,sat,iode,nav))) return 0;
eph2pos(time,eph,rs,dts,var);//这个就算出卫星位置了
time=timeadd(time,tt);
eph2pos(time,eph,rst,dtst,var);//调用两次,求解tt时间间隔的位置。之后rst-rs得出位移变化,再除以tt求出速度。后面这个是1ms后的位置
*svh=eph->svh;
}
else if (sys==SYS_GLO) {
if (!(geph=selgeph(teph,sat,iode,nav))) return 0;
geph2pos(time,geph,rs,dts,var);
time=timeadd(time,tt);
geph2pos(time,geph,rst,dtst,var);
*svh=geph->svh;
}
else if (sys==SYS_SBS) {
if (!(seph=selseph(teph,sat,nav))) return 0;
seph2pos(time,seph,rs,dts,var);
time=timeadd(time,tt);
seph2pos(time,seph,rst,dtst,var);
*svh=seph->svh;
}
else return 0;
/* satellite velocity and clock drift by differential approx */
for (i=0;i<3;i++) rs[i+3]=(rst[i]-rs[i])/tt; //速度计算。i+3,对应着[x,y,z,vx,vy,vz] 从vx开始
dts[1]=(dtst[0]-dts[0])/tt; //钟piao计算
return 1;
}?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!