杰发科技AC7840——CAN通信简介(2)
发布时间:2024年01月08日
1.时钟频率
2.位时间
3.采样点
4.消息缓冲区
和ST、NXP的邮箱类似,AutoChips用了缓冲区的概念。

5.接收缓冲区
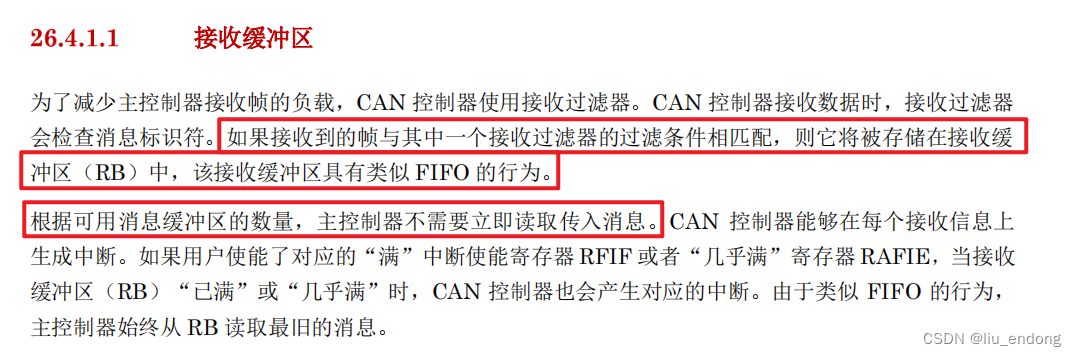
屏蔽掉demo程序的发送,只看接收情况

在回调中接收数据
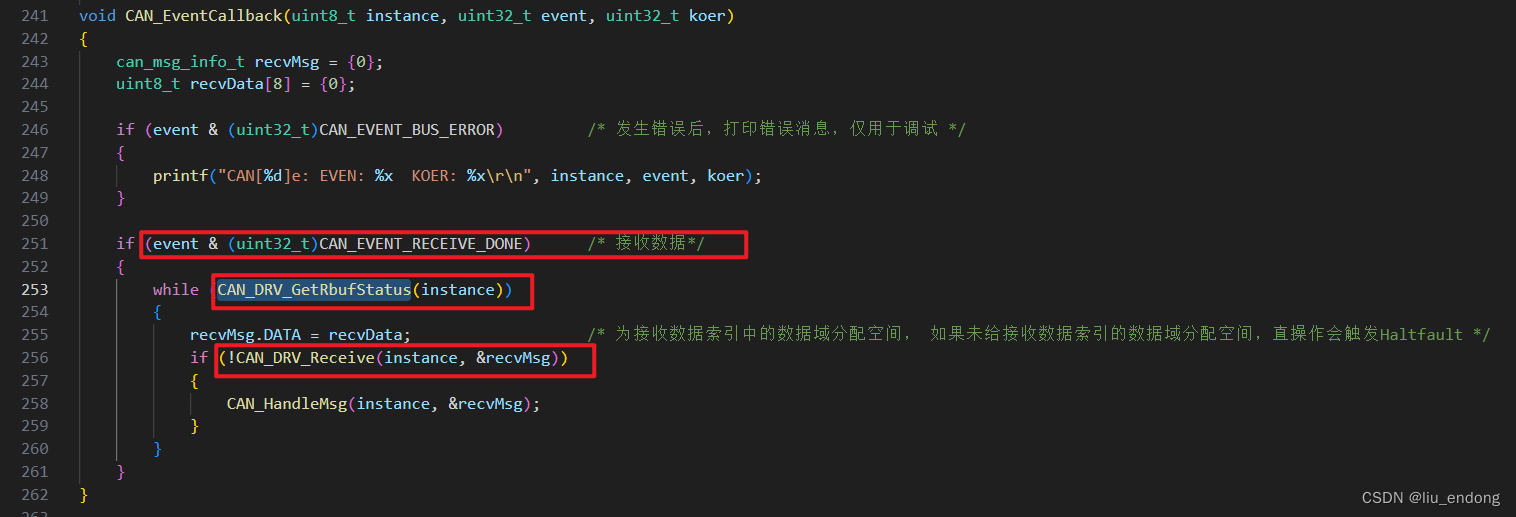
先判断是不是进了接收中断


接收数据的处理函数

所有buff数据放到Info

buff的内容

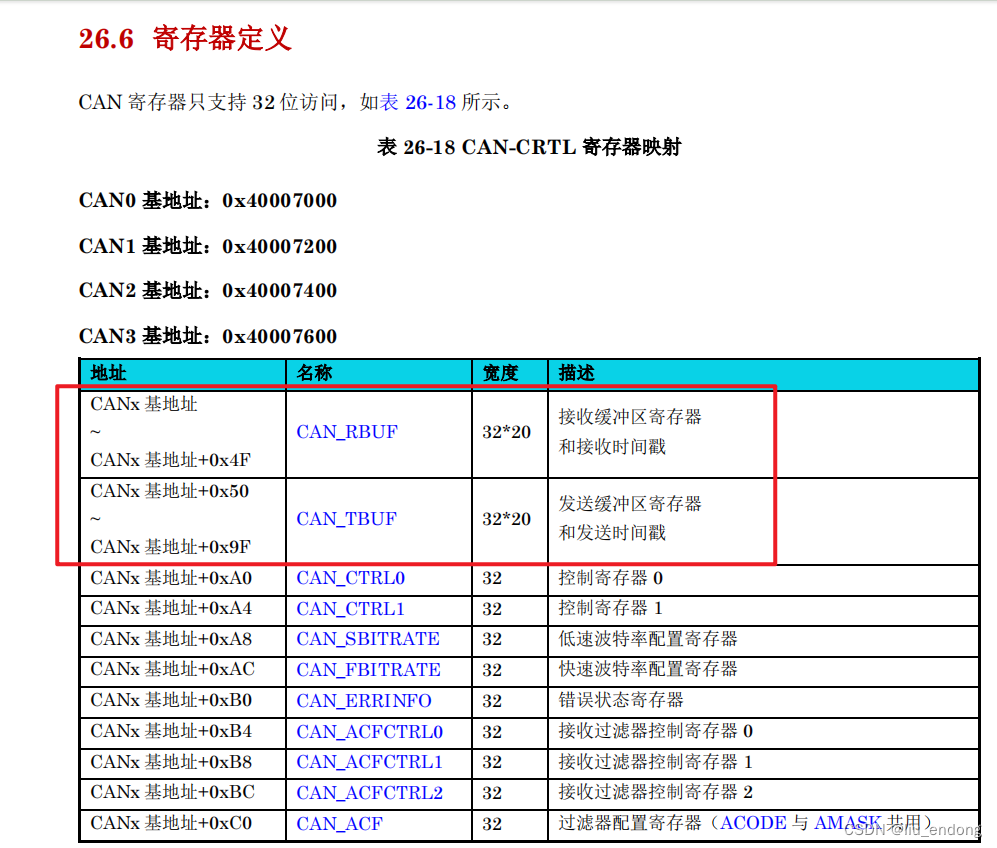
BUFF的地址
标准帧buff寄存器定义

扩展帧buff寄存器定义

这里的80个字节和上面的到75似乎对不上
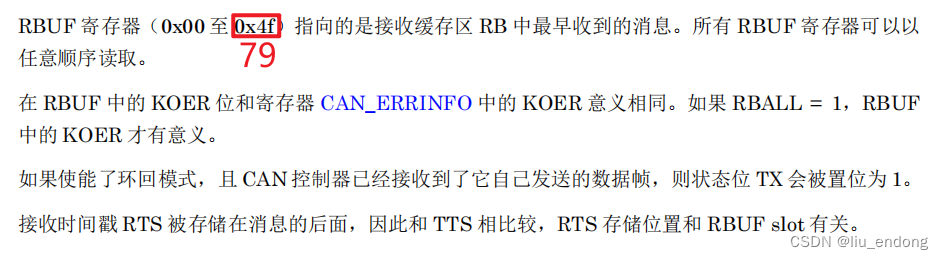
再看下寄存器定义,发现应该是还有保留字节。

至此,CAN接受已经大致清楚了,知道他是怎么分布的。
6.发送缓冲区
调用接口

组帧

发送帧数据结构定义

排除ERROR和BUSY状态后开始填充数据到BUFF
 前面填充信息位
前面填充信息位
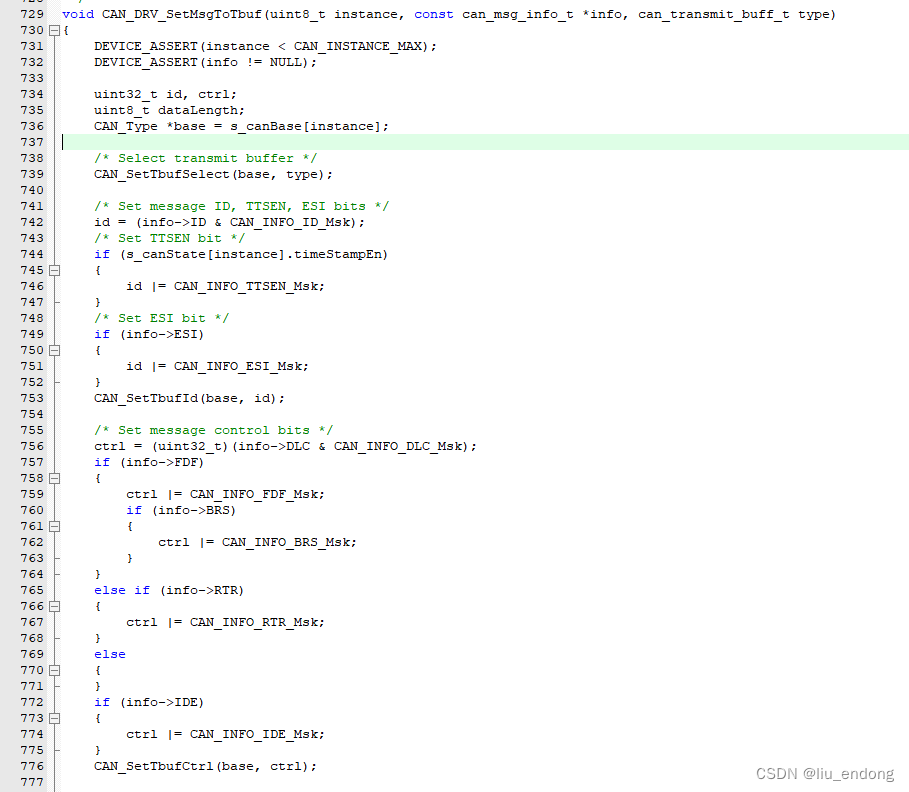 后面填充数据位
后面填充数据位
void CAN_WriteTbufData(CAN_Type *base, const uint8_t *txData, uint8_t length)
{
DEVICE_ASSERT(txData != NULL);
uint8_t i;
uint32_t *data = (uint32_t *)&base->TBUF.DATA[0];
for (i = 0U; i < length; i += 4U)
{
*data++ = *(uint32_t *)(&txData[i]);
}
}
static inline void CAN_SelectNextTsbuf(CAN_Type *base)
{
base->CTRL0 |= CAN_CTRL0_TSNEXT_Msk;
}数据填充完毕开始发送

State列表
/* CAN state struct */
typedef struct
{
uint32_t interruptFlag; /* CAN interrupt flag */
bool initState; /* CAN initialization state */
bool interruptEn; /* CAN interrupt enable */
bool timeStampEn; /* Time stamp enable */
bool dmaRecvEn; /* DMA receive enable */
bool memEccEn; /* CAN memory ECC enable */
semaphore_t txCompleted; /* Transmit completed */
semaphore_t rxCompleted; /* Receive completed */
can_transmit_sec_amount_t tsAmount; /* Transmit secondary all frames or one frame */
can_callback_t callback; /* CAN callback function pointer */
can_callback_t wakeupCallback; /* CAN wakeup callback function pointer */
} can_state_t;can_transmit_sec_amount_t列表
typedef enum
{
CAN_TRANSMIT_SEC_ALL = 0U, /*!< Transmit secondary all messages */
CAN_TRANSMIT_SEC_ONE /*!< Transmit secondary one message */
} can_transmit_sec_amount_t;置位
void CAN_StartTransmit(CAN_Type *base, can_transmit_buff_t type, can_transmit_sec_amount_t amount)
{
if (CAN_TRANSMIT_PRIMARY == type)
{
base->CTRL0 |= CAN_CTRL0_TPE_Msk;
}
else
{
if (CAN_TRANSMIT_SEC_ALL == amount)
{
base->CTRL0 |= CAN_CTRL0_TSALL_Msk; /* Send all messages */
}
else
{
base->CTRL0 |= CAN_CTRL0_TSONE_Msk; /* Send one message only */
}
}
}
置位之后,硬件开始发送。至此,发送缓冲大致走了一遍。
文章来源:https://blog.csdn.net/qq_35697978/article/details/135382561
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Qt‘s 撤销框架(Qt‘s Undo Framework)
- Java的常见注解
- 全平台通用使用 kind 快速搭建 k8s 开发环境,坑已踩(无坑版)
- ELK生命周期
- MS-DETR论文解读
- HTML基础
- 记录下载安装rabbitmq(Linux) 并整合springboot--详细版(全)
- gcd辗转相除算法
- Validate Data in React Spreadsheet Apps -SpreadJS
- xhr、jQuery、axios、fetch、vue-resource简单了解和对比